
DCS系統(tǒng)在空分壓縮機(jī)的防喘振控制系統(tǒng)中的應(yīng)用
中國自動化網(wǎng)
摘要: 邏輯控制即控制系統(tǒng)與邏輯點(diǎn)的相互配合應(yīng)用。空分壓縮機(jī)防喘振系統(tǒng),是靠HoneywellTPS系統(tǒng)(DCS)本身先進(jìn)的智能控制算法,以及多重冗余和容錯(cuò)技術(shù)加上功能強(qiáng)大的邏輯控制來實(shí)現(xiàn)的。
Abstract:
Key words :
</a>邏輯控制" title="邏輯控制">邏輯控制" title="邏輯控制">邏輯控制即控制系統(tǒng)與邏輯點(diǎn)的相互配合應(yīng)用。空分壓縮機(jī)防喘振系統(tǒng),是靠Honeywell TPS系統(tǒng)(DCS)本身先進(jìn)的智能控制算法,以及多重冗余和容錯(cuò)技術(shù)加上功能強(qiáng)大的邏輯控制來實(shí)現(xiàn)的。
關(guān)鍵詞:控制系統(tǒng) 邏輯控制 防喘振 DCS系統(tǒng)
Abstract:The logic controls is that the application between logic point and control system.It depends on its advanced intelligent control algorithm by Honeywell TPS system (DCS) and it comes true under the control of the multiple Redundancy and fault-tolerant technology with the powerful logic function.
Keywords:Control system, Logic Control, prevent from breathing and shaking, Distributed Control system
前言
西林鋼鐵公司6000m3/h空分設(shè)備由杭州制氧機(jī)集團(tuán)公司2001年5月成套,工廠設(shè)計(jì)由北京鋼鐵設(shè)計(jì)總院設(shè)計(jì),于2001年9月2日順利投產(chǎn)出氧,歷時(shí)半年多的時(shí)間運(yùn)行表明,該機(jī)組穩(wěn)定運(yùn)行,各項(xiàng)指標(biāo)均達(dá)到設(shè)計(jì)值或超過設(shè)計(jì)值。整個(gè)控制系統(tǒng)采用美國霍尼韋爾的TDC3000和兩臺GUS站構(gòu)成。
一. 控制系統(tǒng)的組成
1.自動控制系統(tǒng)的構(gòu)成。
自動控制系統(tǒng)由被控對象、檢測元件、控制器和調(diào)節(jié)閥等部分組成。如圖一所示。
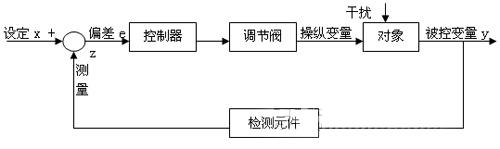
圖一 自動控制系統(tǒng)方框圖
a. 被控對象:需要實(shí)現(xiàn)控制的設(shè)備,機(jī)器或生產(chǎn)過程。
b. 被控變量:對象內(nèi)要求保持設(shè)定值的物理量。
c. 操縱變量:受控制器操縱,要以使被控變量保持設(shè)定值的物料量或能量。
d. 干擾(擾動),除操縱變量以外,作用于對象并能引起被控變量變化的因素,如負(fù)荷變化就是一種典型的擾動。
e. 設(shè)定值:被控變量的目標(biāo)值。
f. 偏差:偏差理論上應(yīng)該是被控變量的設(shè)定值與實(shí)際值之差。
2.串級調(diào)節(jié)系統(tǒng)
串級調(diào)節(jié)系統(tǒng)是最早、效果最好、使用最廣泛的一種復(fù)雜控制系統(tǒng),它的特點(diǎn)是兩個(gè)控制器相串接,主控制器的輸出作為副控制器的設(shè)定,適用于時(shí)間常數(shù)及純滯后較大的被控制對象。
二.邏輯點(diǎn)功能
邏輯點(diǎn)提供了邏輯能力,它與數(shù)字組合點(diǎn)配合,提供了組合邏輯功能。邏輯點(diǎn)由邏輯塊、FLAG、數(shù)字、輸入連接和輸出連接等組成。邏輯點(diǎn)最多有12個(gè)輸入,16個(gè)邏輯塊,12個(gè)輸出連接。
三、空分離心式壓縮機(jī)的防喘振控制
空分選用的是離心式壓縮機(jī),離心壓縮機(jī)工作效率高,在正常工況條件下運(yùn)行平穩(wěn),壓縮氣流無脈動,對其所輸送介質(zhì)的壓力、流量、溫度變化的敏感性相對較大,容易發(fā)生喘振。發(fā)生喘振時(shí)流量大幅波動,機(jī)組劇烈振動,如不及時(shí)采取措施加以控制,會使壓縮機(jī)轉(zhuǎn)子和靜子經(jīng)受交變應(yīng)力作用而斷裂;使極間壓力失常而引起強(qiáng)烈振動,導(dǎo)致密封及推力軸承損壞;使運(yùn)動元件和靜止元件相碰,造成嚴(yán)重事故。所以應(yīng)盡力防止壓縮機(jī)進(jìn)入喘振工況。喘振現(xiàn)象是完全可以得到有效控制的,如圖二所示,根據(jù)離心壓縮機(jī)在不同工況條件下的性能曲線,只要我們把壓縮機(jī)的最小流量控制在工作區(qū)(控制線內(nèi)),壓縮機(jī)即可正常工作。喘振的標(biāo)志是一最小流量點(diǎn),低于這個(gè)流量即出現(xiàn)喘振。因此需要有一個(gè)防止壓縮機(jī)發(fā)生喘振的控制系統(tǒng),限制壓縮機(jī)的流量不會降低到這種工況下的最低允許值。即不會使壓縮機(jī)進(jìn)入喘振工況區(qū)域內(nèi)。
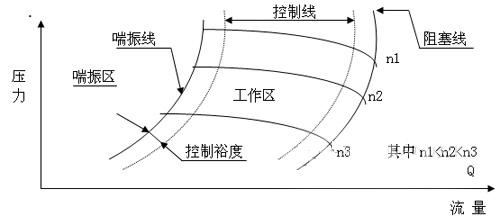
圖二 離心壓縮機(jī)性能曲線與防喘振控制原理圖
壓縮機(jī)的防喘振條件為:△P≥a(p2±bp1)
式中 △p——進(jìn)口管路內(nèi)測量流量的孔板前后壓差
p1——進(jìn)口處壓力
p2——出口處壓力
a、b——與壓比、溫度、孔板流量計(jì)的孔板系數(shù)有關(guān)的參數(shù),可通過熱工計(jì)算機(jī)和實(shí)驗(yàn)取得。
從圖二看離心式壓縮機(jī)在輸氣過程中由于運(yùn)行工況(p、T、Q)的不穩(wěn)定,若控制不好會使壓縮機(jī)的工作性能顯著惡化,氣流參數(shù)(壓力、流量)產(chǎn)生大幅度脈動,噪聲和振動加劇,嚴(yán)重時(shí)足以損壞壓縮機(jī)。傳統(tǒng)的防喘振方法一般采用壓縮機(jī)額定的最小流量控制法,此種控制方法的缺點(diǎn)是不能充分使輸氣壓縮機(jī)工作在其工作區(qū),頻繁起動防喘閥(放空閥)浪費(fèi)了能源,降低了輸氣的經(jīng)濟(jì)性。而且隨著壓縮機(jī)的長期運(yùn)轉(zhuǎn)磨損,其性能會發(fā)生變化即壓縮機(jī)額定最小流量(喘振線)特性會發(fā)生偏移,如果不進(jìn)行實(shí)時(shí)修正,必將造成控制失靈,使壓縮機(jī)工作在喘振區(qū),其造成后果可想而知。因此,對空分離心壓縮機(jī)在輸氣過程中由于運(yùn)行工況變化和壓縮機(jī)的性能發(fā)生變化可能造成的喘振,我們采用了以下控制策略:
(1) 根據(jù)離心壓縮機(jī)的額定最小流量特性曲線和輸氣系統(tǒng)的特定參數(shù)確定壓縮機(jī)的最佳工作區(qū)(控制裕度線);
(2) 用數(shù)學(xué)方法擬和出不同工況條件(p、T)下的喘振線和防喘振控制線;
(3) 用海量數(shù)據(jù)的處理方法,將壓縮機(jī)的歷史數(shù)據(jù)進(jìn)行在線處理,計(jì)算出離心壓縮機(jī)的實(shí)際最小流量與最小額定流量的偏移;
(4) 根據(jù)離心壓縮機(jī)的進(jìn)出口溫度和實(shí)際最小流量的偏移對喘振線和防喘控制線進(jìn)行實(shí)時(shí)補(bǔ)償;
(5) 用工況點(diǎn)求取的喘振點(diǎn)最小流量與實(shí)際工況點(diǎn)的最小流量進(jìn)行比較;
(6) 把上述比較的結(jié)果(流量的變化以及變化的速率)作為控制器的輸入,通過對壓縮機(jī)進(jìn)口導(dǎo)葉(進(jìn)氣閥)、防喘閥(放空閥)的控制,實(shí)現(xiàn)對離心壓縮機(jī)的防喘控制。
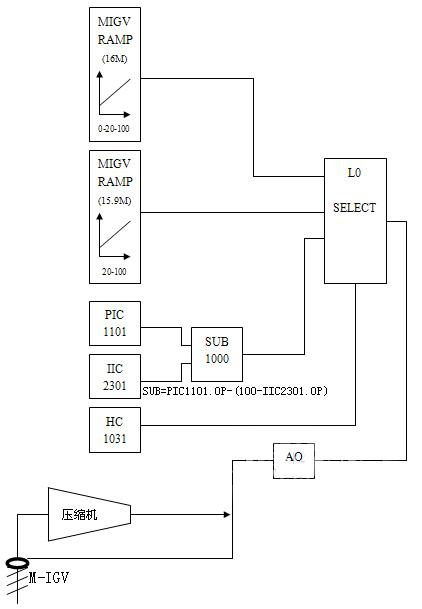
圖三 主壓縮機(jī)入口導(dǎo)葉控制邏輯圖
如圖三所示:當(dāng)主壓縮機(jī)起動時(shí),IIC2301在自動位置,IIC2301.OP=100; PIC1101在程序位置,用CL語言設(shè)置其輸出,等于MIGVRAMP2的輸出,當(dāng)PI1101.PV=PI1101.SP時(shí),PIC1101自動設(shè)置為自動,M-IGV(入口導(dǎo)葉)由PIC1101自動控制,HC1031.OP=100。當(dāng)電機(jī)允許加載信號為“ON”時(shí),MIGVRAMP1和MIGVRAMP2起動,其輸出開始爬坡增加,在一秒內(nèi),MIGVRAMP1由O增加到20,然后在15分59秒內(nèi)由20增加到100。 MIGVRAMP2再延時(shí)一秒后,同樣在15分59秒內(nèi)由20增加到100。當(dāng)空分故障時(shí),MIGVRAMP2被“SHUTDOWN”,其輸出為20。當(dāng)空份故障排除時(shí),按下HS1105(空分故障確認(rèn))后,MIGVRAMP2被起動,其輸出在1秒延時(shí)后,在15分59秒內(nèi),從20增加到100。SUB 1000模塊是使入口導(dǎo)葉開度等于PIC1101的開度減去“100減去IIC2301的開度”。LO SELECT是低選擇邏輯塊,選擇低的開度輸出到MIG。當(dāng)電機(jī)允許加載信號“OFF”時(shí),壓縮機(jī)停車,MIGVRAMP1被“SHUTDOWN”,當(dāng)其輸出為O時(shí),入口導(dǎo)葉全關(guān)。HC1031是單機(jī)試車和正常時(shí),操作工用其卸壓和卸載,人工只能關(guān)小MIGV,不能開大。
當(dāng)主壓縮機(jī)起動時(shí), HC1046.op=0時(shí),PIC1044為自動狀態(tài),當(dāng) PIC1044.op=0時(shí) FICI1044為程序狀態(tài),用CL語言設(shè)置FIC1044.op=M-BOVRAMP的輸出。當(dāng)FIC1044.pv≤FIC1044.sp時(shí),F(xiàn)IC1044自動設(shè)置為串級控制。當(dāng)電機(jī)允許加載信號“ON”或HS1105(空分故障確認(rèn))“ON”時(shí),M-BOVRAMP起動,開始爬破,其輸出控制GI1046,在PI1044.pv=PIC1044.sp,F(xiàn)I1044.pv≤FIC1044.sp時(shí),F(xiàn)IC1044取代RAMP控制GI1046。當(dāng)PIC1044.pv≥PIC1044.sp時(shí),說明輸出壓力太高,此時(shí)輸出到BOV的信號為FIC1044.op+PIC1044.op。當(dāng)電機(jī)允許加載信號“OFF”(停車)或空分故障時(shí),M-BOVRAMP被強(qiáng)迫輸出為100,GI1046閥全開。M-BOVRAMP爬坡時(shí)間為12分,由100降到0。在起動時(shí),因流量為零,為使FIC1044保持手動狀態(tài),先用CL語言延時(shí)5秒,當(dāng)FI1044.pv≤FIC1044.sp時(shí),F(xiàn)IC1044投入串級。HC1046為單機(jī)試車和正常停車時(shí)操作工卸壓卸載用,人工只能開大GI1046,不能關(guān)小。PLUS 是加法器模塊。HI SELECT是高選擇邏輯塊,選擇高的開度輸出到GI1046。
入口導(dǎo)葉的邏輯控制和放空閥的邏輯控制使壓縮機(jī)的運(yùn)行工況得到了很好的控制,無論壓縮機(jī)的壓縮比是多少,只要保證壓縮機(jī)的吸入流量比喘振流量大,能對喘振現(xiàn)象產(chǎn)生的先兆加以快速和準(zhǔn)確的預(yù)測和判斷,并對其加以控制,喘振現(xiàn)象是可以完全避免的。就能保證壓縮機(jī)穩(wěn)定的工作。
參考文獻(xiàn):
1.TPS System LCN Maintenance 2000,8 Honeywell,US
2. 計(jì)算機(jī)控制系統(tǒng) 2004,3,1 清華大學(xué)出版社出版 作者:王錦標(biāo) 編著
關(guān)鍵詞:控制系統(tǒng) 邏輯控制 防喘振 DCS系統(tǒng)
Abstract:The logic controls is that the application between logic point and control system.It depends on its advanced intelligent control algorithm by Honeywell TPS system (DCS) and it comes true under the control of the multiple Redundancy and fault-tolerant technology with the powerful logic function.
Keywords:Control system, Logic Control, prevent from breathing and shaking, Distributed Control system
前言
西林鋼鐵公司6000m3/h空分設(shè)備由杭州制氧機(jī)集團(tuán)公司2001年5月成套,工廠設(shè)計(jì)由北京鋼鐵設(shè)計(jì)總院設(shè)計(jì),于2001年9月2日順利投產(chǎn)出氧,歷時(shí)半年多的時(shí)間運(yùn)行表明,該機(jī)組穩(wěn)定運(yùn)行,各項(xiàng)指標(biāo)均達(dá)到設(shè)計(jì)值或超過設(shè)計(jì)值。整個(gè)控制系統(tǒng)采用美國霍尼韋爾的TDC3000和兩臺GUS站構(gòu)成。
一. 控制系統(tǒng)的組成
1.自動控制系統(tǒng)的構(gòu)成。
自動控制系統(tǒng)由被控對象、檢測元件、控制器和調(diào)節(jié)閥等部分組成。如圖一所示。
圖一 自動控制系統(tǒng)方框圖
a. 被控對象:需要實(shí)現(xiàn)控制的設(shè)備,機(jī)器或生產(chǎn)過程。
b. 被控變量:對象內(nèi)要求保持設(shè)定值的物理量。
c. 操縱變量:受控制器操縱,要以使被控變量保持設(shè)定值的物料量或能量。
d. 干擾(擾動),除操縱變量以外,作用于對象并能引起被控變量變化的因素,如負(fù)荷變化就是一種典型的擾動。
e. 設(shè)定值:被控變量的目標(biāo)值。
f. 偏差:偏差理論上應(yīng)該是被控變量的設(shè)定值與實(shí)際值之差。
2.串級調(diào)節(jié)系統(tǒng)
串級調(diào)節(jié)系統(tǒng)是最早、效果最好、使用最廣泛的一種復(fù)雜控制系統(tǒng),它的特點(diǎn)是兩個(gè)控制器相串接,主控制器的輸出作為副控制器的設(shè)定,適用于時(shí)間常數(shù)及純滯后較大的被控制對象。
二.邏輯點(diǎn)功能
邏輯點(diǎn)提供了邏輯能力,它與數(shù)字組合點(diǎn)配合,提供了組合邏輯功能。邏輯點(diǎn)由邏輯塊、FLAG、數(shù)字、輸入連接和輸出連接等組成。邏輯點(diǎn)最多有12個(gè)輸入,16個(gè)邏輯塊,12個(gè)輸出連接。
三、空分離心式壓縮機(jī)的防喘振控制
空分選用的是離心式壓縮機(jī),離心壓縮機(jī)工作效率高,在正常工況條件下運(yùn)行平穩(wěn),壓縮氣流無脈動,對其所輸送介質(zhì)的壓力、流量、溫度變化的敏感性相對較大,容易發(fā)生喘振。發(fā)生喘振時(shí)流量大幅波動,機(jī)組劇烈振動,如不及時(shí)采取措施加以控制,會使壓縮機(jī)轉(zhuǎn)子和靜子經(jīng)受交變應(yīng)力作用而斷裂;使極間壓力失常而引起強(qiáng)烈振動,導(dǎo)致密封及推力軸承損壞;使運(yùn)動元件和靜止元件相碰,造成嚴(yán)重事故。所以應(yīng)盡力防止壓縮機(jī)進(jìn)入喘振工況。喘振現(xiàn)象是完全可以得到有效控制的,如圖二所示,根據(jù)離心壓縮機(jī)在不同工況條件下的性能曲線,只要我們把壓縮機(jī)的最小流量控制在工作區(qū)(控制線內(nèi)),壓縮機(jī)即可正常工作。喘振的標(biāo)志是一最小流量點(diǎn),低于這個(gè)流量即出現(xiàn)喘振。因此需要有一個(gè)防止壓縮機(jī)發(fā)生喘振的控制系統(tǒng),限制壓縮機(jī)的流量不會降低到這種工況下的最低允許值。即不會使壓縮機(jī)進(jìn)入喘振工況區(qū)域內(nèi)。
圖二 離心壓縮機(jī)性能曲線與防喘振控制原理圖
壓縮機(jī)的防喘振條件為:△P≥a(p2±bp1)
式中 △p——進(jìn)口管路內(nèi)測量流量的孔板前后壓差
p1——進(jìn)口處壓力
p2——出口處壓力
a、b——與壓比、溫度、孔板流量計(jì)的孔板系數(shù)有關(guān)的參數(shù),可通過熱工計(jì)算機(jī)和實(shí)驗(yàn)取得。
從圖二看離心式壓縮機(jī)在輸氣過程中由于運(yùn)行工況(p、T、Q)的不穩(wěn)定,若控制不好會使壓縮機(jī)的工作性能顯著惡化,氣流參數(shù)(壓力、流量)產(chǎn)生大幅度脈動,噪聲和振動加劇,嚴(yán)重時(shí)足以損壞壓縮機(jī)。傳統(tǒng)的防喘振方法一般采用壓縮機(jī)額定的最小流量控制法,此種控制方法的缺點(diǎn)是不能充分使輸氣壓縮機(jī)工作在其工作區(qū),頻繁起動防喘閥(放空閥)浪費(fèi)了能源,降低了輸氣的經(jīng)濟(jì)性。而且隨著壓縮機(jī)的長期運(yùn)轉(zhuǎn)磨損,其性能會發(fā)生變化即壓縮機(jī)額定最小流量(喘振線)特性會發(fā)生偏移,如果不進(jìn)行實(shí)時(shí)修正,必將造成控制失靈,使壓縮機(jī)工作在喘振區(qū),其造成后果可想而知。因此,對空分離心壓縮機(jī)在輸氣過程中由于運(yùn)行工況變化和壓縮機(jī)的性能發(fā)生變化可能造成的喘振,我們采用了以下控制策略:
(1) 根據(jù)離心壓縮機(jī)的額定最小流量特性曲線和輸氣系統(tǒng)的特定參數(shù)確定壓縮機(jī)的最佳工作區(qū)(控制裕度線);
(2) 用數(shù)學(xué)方法擬和出不同工況條件(p、T)下的喘振線和防喘振控制線;
(3) 用海量數(shù)據(jù)的處理方法,將壓縮機(jī)的歷史數(shù)據(jù)進(jìn)行在線處理,計(jì)算出離心壓縮機(jī)的實(shí)際最小流量與最小額定流量的偏移;
(4) 根據(jù)離心壓縮機(jī)的進(jìn)出口溫度和實(shí)際最小流量的偏移對喘振線和防喘控制線進(jìn)行實(shí)時(shí)補(bǔ)償;
(5) 用工況點(diǎn)求取的喘振點(diǎn)最小流量與實(shí)際工況點(diǎn)的最小流量進(jìn)行比較;
(6) 把上述比較的結(jié)果(流量的變化以及變化的速率)作為控制器的輸入,通過對壓縮機(jī)進(jìn)口導(dǎo)葉(進(jìn)氣閥)、防喘閥(放空閥)的控制,實(shí)現(xiàn)對離心壓縮機(jī)的防喘控制。
圖三 主壓縮機(jī)入口導(dǎo)葉控制邏輯圖
如圖三所示:當(dāng)主壓縮機(jī)起動時(shí),IIC2301在自動位置,IIC2301.OP=100; PIC1101在程序位置,用CL語言設(shè)置其輸出,等于MIGVRAMP2的輸出,當(dāng)PI1101.PV=PI1101.SP時(shí),PIC1101自動設(shè)置為自動,M-IGV(入口導(dǎo)葉)由PIC1101自動控制,HC1031.OP=100。當(dāng)電機(jī)允許加載信號為“ON”時(shí),MIGVRAMP1和MIGVRAMP2起動,其輸出開始爬坡增加,在一秒內(nèi),MIGVRAMP1由O增加到20,然后在15分59秒內(nèi)由20增加到100。 MIGVRAMP2再延時(shí)一秒后,同樣在15分59秒內(nèi)由20增加到100。當(dāng)空分故障時(shí),MIGVRAMP2被“SHUTDOWN”,其輸出為20。當(dāng)空份故障排除時(shí),按下HS1105(空分故障確認(rèn))后,MIGVRAMP2被起動,其輸出在1秒延時(shí)后,在15分59秒內(nèi),從20增加到100。SUB 1000模塊是使入口導(dǎo)葉開度等于PIC1101的開度減去“100減去IIC2301的開度”。LO SELECT是低選擇邏輯塊,選擇低的開度輸出到MIG。當(dāng)電機(jī)允許加載信號“OFF”時(shí),壓縮機(jī)停車,MIGVRAMP1被“SHUTDOWN”,當(dāng)其輸出為O時(shí),入口導(dǎo)葉全關(guān)。HC1031是單機(jī)試車和正常時(shí),操作工用其卸壓和卸載,人工只能關(guān)小MIGV,不能開大。
當(dāng)主壓縮機(jī)起動時(shí), HC1046.op=0時(shí),PIC1044為自動狀態(tài),當(dāng) PIC1044.op=0時(shí) FICI1044為程序狀態(tài),用CL語言設(shè)置FIC1044.op=M-BOVRAMP的輸出。當(dāng)FIC1044.pv≤FIC1044.sp時(shí),F(xiàn)IC1044自動設(shè)置為串級控制。當(dāng)電機(jī)允許加載信號“ON”或HS1105(空分故障確認(rèn))“ON”時(shí),M-BOVRAMP起動,開始爬破,其輸出控制GI1046,在PI1044.pv=PIC1044.sp,F(xiàn)I1044.pv≤FIC1044.sp時(shí),F(xiàn)IC1044取代RAMP控制GI1046。當(dāng)PIC1044.pv≥PIC1044.sp時(shí),說明輸出壓力太高,此時(shí)輸出到BOV的信號為FIC1044.op+PIC1044.op。當(dāng)電機(jī)允許加載信號“OFF”(停車)或空分故障時(shí),M-BOVRAMP被強(qiáng)迫輸出為100,GI1046閥全開。M-BOVRAMP爬坡時(shí)間為12分,由100降到0。在起動時(shí),因流量為零,為使FIC1044保持手動狀態(tài),先用CL語言延時(shí)5秒,當(dāng)FI1044.pv≤FIC1044.sp時(shí),F(xiàn)IC1044投入串級。HC1046為單機(jī)試車和正常停車時(shí)操作工卸壓卸載用,人工只能開大GI1046,不能關(guān)小。PLUS 是加法器模塊。HI SELECT是高選擇邏輯塊,選擇高的開度輸出到GI1046。
入口導(dǎo)葉的邏輯控制和放空閥的邏輯控制使壓縮機(jī)的運(yùn)行工況得到了很好的控制,無論壓縮機(jī)的壓縮比是多少,只要保證壓縮機(jī)的吸入流量比喘振流量大,能對喘振現(xiàn)象產(chǎn)生的先兆加以快速和準(zhǔn)確的預(yù)測和判斷,并對其加以控制,喘振現(xiàn)象是可以完全避免的。就能保證壓縮機(jī)穩(wěn)定的工作。
參考文獻(xiàn):
1.TPS System LCN Maintenance 2000,8 Honeywell,US
2. 計(jì)算機(jī)控制系統(tǒng) 2004,3,1 清華大學(xué)出版社出版 作者:王錦標(biāo) 編著
此內(nèi)容為AET網(wǎng)站原創(chuàng),未經(jīng)授權(quán)禁止轉(zhuǎn)載。