
此外,一個寬范圍的連續(xù)全屏幕電子快門功能(從1μs到255ms)可避免對很多光學(xué)設(shè)備如光圈和機(jī)械快門等的需求。這對那些緊湊而經(jīng)濟(jì)的產(chǎn)品如定向視聽相機(jī)組件、電子監(jiān)視、車載電視系統(tǒng)、消費(fèi)品、高技術(shù)玩具等非常有吸引力。
其主要特征有:12.1μm×12.1μm的CMOS像素元;352×290像素陣列(有效元:352×288);基于像素元的片上幀buffer;低速可按X-Y地址輸出像素信號;片上視頻放大器;片上8位A/D轉(zhuǎn)換器;低功耗(小于200mW);全屏電子快門寬范圍連續(xù)可調(diào);內(nèi)置黑狀態(tài)參考;LCC- 48
腳封裝;
功能:
像素陣列:由352×290的光敏區(qū)組成,包括一系列的參考行和可用的352×288像素陣列。
控制信號“XYSEL”的狀態(tài)決定九位地址(ADO to AD8)的譯碼與X或Y地址對應(yīng)。感光過程的初始化由"VRST"的電平對感光區(qū)內(nèi)的各感光元素進(jìn)行預(yù)置。像素陣列的初始化可以全屏一次進(jìn)行,也可以通過"PREC"、X地址譯碼輸出以及“G”信號的組合邏輯狀態(tài)按行進(jìn)行。產(chǎn)生的感光信號可暫存在幀buffer里,通過取樣控制信號(包括"Samp"信號、X譯碼輸出、"SampG"信號的邏輯綜合),由X-Y地址可將此buffer內(nèi)的指定內(nèi)容讀出。
在讀數(shù)據(jù)期間,由X地址譯碼輸出和"Sel"信號共同決定哪一行像素為當(dāng)前行,同時在"Read"信號的上升沿,對當(dāng)前像素區(qū)的感光單元采樣并送至一 buffer行里。此buffer行通過多路傳輸技術(shù)輸出至輸出行"Vout"。多路器由Y信號的譯碼輸出控制。Y譯碼的最近一次輸出用來讀
出動態(tài)暗參考。因此,在正常的圖像讀出方式下,最重要的Y譯碼輸出是O×15F。
ME1010對由外部邏輯電路(微控制器或ASIC)指定的X-Y地址對應(yīng)的感光區(qū)(當(dāng)前區(qū))的感光信號保存至模擬信號幀Buffer。由"Vout"腳輸出的原始像素信號是負(fù)極性信號。換言之,黑色信號的電平比白色信號的電平高。
黑色參考單元行:
感光陣列的第一行(底部)是用來對動態(tài)黑色(參考背景)進(jìn)行感光。這一動態(tài)黑色參考是在取樣過程開始前,第一行的光敏元感光產(chǎn)生的。當(dāng)選擇此行即Y譯碼輸出為15F(351)時,參考信號即輸出至"Vref"腳做為后續(xù)的源。這樣就為關(guān)閉信號處理器和片上模數(shù)轉(zhuǎn)換器提供了黑色參考。
片上8位模數(shù)轉(zhuǎn)換器(8-bADC);
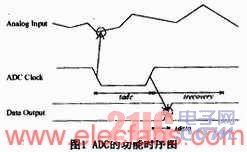
片上8位模數(shù)轉(zhuǎn)換器可將模擬圖像信號轉(zhuǎn)換成數(shù)字圖像信號。快速ADC的功能時序圖如下圖1所示。在"ADCclock"信號的下降沿對模擬圖像信號取樣,在"ADC Clock"低電平期間完成A/D轉(zhuǎn)換,在"ADCClock"的上升沿輸出數(shù)字信號。由此引起半個時鐘周期的轉(zhuǎn)換延遲(低電平寬度)。轉(zhuǎn)換范圍由外置參考電壓決定。以電源方式輸入的補(bǔ)償信號可將偏離信號減少到零。
2 硬件系統(tǒng)
本系統(tǒng)硬件主要由傳感器及外圍電路、按鍵電路、基準(zhǔn)電壓電路、MCU處理器、顯示電路、與上位機(jī)通訊接口電路、電源電路等部分組成,如圖2所示。

傳感器采用ME1010型CMOS圖像傳感器,其外圍電路主要有地址譯碼與驅(qū)動電路、數(shù)據(jù)總線、采樣時鐘及控制電路、A/D控制電路等部分組成。
按鍵電路較簡單,主要有計花、計長、暫停鍵等,實(shí)現(xiàn)計花、計長、暫停檢修等功能。
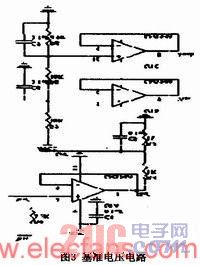
基準(zhǔn)電壓電路為圖像傳感器提供A/D轉(zhuǎn)換參考電平。具體電路如圖3所示。
顯示電路完成計花、計長結(jié)果的顯示,主要由顯示模塊及驅(qū)動電路組成,顯示模塊采用數(shù)碼管實(shí)現(xiàn),也可采用液晶顯示模塊,前者結(jié)構(gòu)簡單、成本低廉。
通訊接口電路實(shí)現(xiàn)各計花器終端與上位機(jī)的數(shù)據(jù)傳送。在系統(tǒng)研制階段,還可通過通訊接口電路,獲得傳感器數(shù)據(jù),以設(shè)定合理的整定值。
MCU選用8位單片機(jī)即可。
3 軟件系統(tǒng)
軟件系統(tǒng)主要由主程序、按鍵掃描程序、顯示程序等構(gòu)成。
主程序主要負(fù)責(zé)對傳感器信號進(jìn)行處理,調(diào)用按健子程序和顯示子程序。圖4軟件流程圖

4 仿真
采用匯編語言完成程序編寫,在單片機(jī)IDE平臺UV2上,對各程序進(jìn)行仿真,仿真結(jié)果表明,各程序模塊功能正確。利用模擬信號進(jìn)行硬件仿真,仿真結(jié)果表明,系統(tǒng)完全能夠?qū)崿F(xiàn)預(yù)定功能:根據(jù)花結(jié)整定參數(shù),對輸入信號進(jìn)行處理,統(tǒng)計出當(dāng)前線錠上花結(jié)的數(shù)目。