
引言
二次雷達(dá)也叫做空管雷達(dá)信標(biāo)系統(tǒng)(Air TrafficControl Radar Beacon System,ATCRBS)。它最初是在空戰(zhàn)中為了使雷達(dá)分辨出敵我雙方的飛機(jī)而發(fā)展的敵我識(shí)別系統(tǒng),當(dāng)把這個(gè)系統(tǒng)的基本原理和部件經(jīng)過(guò)發(fā)展后用于民航的空中交通管制后,就成了二次雷達(dá)系統(tǒng)。二次雷達(dá)是在地面站和目標(biāo)應(yīng)答器的合作下,采用問(wèn)答方式工作,它必須經(jīng)過(guò)兩次有源輻射電磁波信號(hào)才能完成應(yīng)有的功能。
單脈沖二次雷達(dá)是按照雷達(dá)方位角度定位體制的不同而定義的,有別于常規(guī)的二次監(jiān)視雷達(dá)。常規(guī)二次監(jiān)視雷達(dá)實(shí)現(xiàn)一個(gè)目標(biāo)定位需要利用雷達(dá)定向主波瓣中對(duì)這個(gè)目標(biāo)的所有應(yīng)答,而單脈沖二次雷達(dá)理論上只需要利用一次詢問(wèn)的應(yīng)答即能準(zhǔn)確定位。單脈沖技術(shù)應(yīng)用于二次雷達(dá),使對(duì)目標(biāo)的測(cè)量可以方便的基于多個(gè)波束,有效地增加了數(shù)據(jù)冗余度,提高了角度測(cè)量的精度。對(duì)應(yīng)答處理而言,單脈沖技術(shù)的應(yīng)用,大大提高了在混疊或交織情況下對(duì)應(yīng)答碼的解碼能力,使單脈沖二次雷達(dá)與常規(guī)二次雷達(dá)相比實(shí)現(xiàn)了一次質(zhì)的飛躍。
國(guó)內(nèi)自主研發(fā)航管二次雷達(dá)在近10年間才開(kāi)始,落后于國(guó)外20世紀(jì)80年代就發(fā)展起來(lái)的二次雷達(dá)系統(tǒng)。現(xiàn)今國(guó)內(nèi)主要民用機(jī)場(chǎng)使用的二次雷達(dá)大多使用的是國(guó)外設(shè)備。如美國(guó)Raytheon二次雷達(dá),意大利Alenia二次雷達(dá),日本東芝雷達(dá)。在中央大力提倡國(guó)內(nèi)自主研發(fā)的政策下,國(guó)內(nèi)的一些廠家也緊跟國(guó)外技術(shù)開(kāi)始研發(fā)屬于中國(guó)的二次雷達(dá)及其終端顯示系統(tǒng)。
民航航管系統(tǒng)的基本要求是安全、迅速和有秩序地將乘客和貨物從某一地點(diǎn)空運(yùn)到另一指定地點(diǎn)。空中交通管制就是為達(dá)到此目的而建立的重要服務(wù)體系。為了滿足民航系統(tǒng)對(duì)雷達(dá)系統(tǒng)可靠性的要求,雷達(dá)的設(shè)計(jì)采用了雙通道熱備份設(shè)計(jì),目的是在當(dāng)前通道故障的
情況下,保證航跡輸出的連續(xù)性,雙通道之間的切換單元在監(jiān)控計(jì)算機(jī)命令下迅速切換。
1 射頻切換系統(tǒng)組成
單脈沖二次雷達(dá)應(yīng)答信號(hào)處理的基本流程如圖1所示。
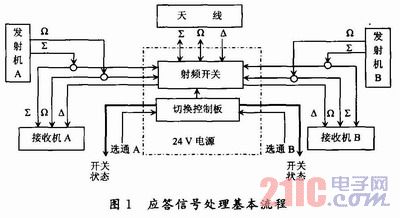
在射頻切換系統(tǒng)中,切換控制板接收監(jiān)控計(jì)算機(jī)發(fā)出的切換命令,當(dāng)確認(rèn)要求進(jìn)行切換時(shí),通過(guò)切換控制板向切換開(kāi)關(guān)發(fā)出切換信號(hào),實(shí)現(xiàn)對(duì)三路射頻信號(hào)與兩個(gè)通道間的切換,三路(∑,△,Ω)開(kāi)關(guān)的工作狀態(tài)一致,即同時(shí)工作在A通道或同時(shí)工作在B通道,三路開(kāi)關(guān)的狀態(tài)隨時(shí)通過(guò)控制電纜以TTL差分方式送給數(shù)據(jù)處理。根據(jù)二次雷達(dá)的技術(shù)指標(biāo),射頻開(kāi)關(guān)的耐峰值功率大于2.5 kW,耐平均功率大于20 W。
在設(shè)計(jì)中,選擇了射頻開(kāi)關(guān)TN6K31,該開(kāi)關(guān)有足夠的頻寬和線性,確保信號(hào)不失真,插入損耗小于0.3 dB,通道隔離度大于70 dB,滿足雷達(dá)系統(tǒng)的指標(biāo)。
射頻切換系統(tǒng)中切換控制單元的原理如圖2所示。

在射頻切換系統(tǒng)的控制電路中,選用Lattice公司的EPLD作為主處理芯片(ispLS11032E),該芯片有64個(gè)I/O端,8個(gè)指定輸入端,6 000個(gè)邏輯門(mén),192個(gè)寄存器,最大時(shí)延小于等于12 ns,通過(guò)簡(jiǎn)單的5線接口,即可用PC機(jī)對(duì)線路板上菊花鏈結(jié)構(gòu)的最多8個(gè)芯片進(jìn)行編程。
切換開(kāi)關(guān)工作原理為:A通道輸入選通控制脈沖時(shí),如當(dāng)前開(kāi)關(guān)工作在A通道,則維持在A通道,不作切換;如當(dāng)前開(kāi)關(guān)工作在B通道,則切換到A通道。同樣,B通道輸入選通控制脈沖時(shí),如當(dāng)前開(kāi)關(guān)工作在B通道,則維持在B通道,不作切換;如當(dāng)前開(kāi)關(guān)工作在A通道,則切換到B通道。即同時(shí)工作在A通道或同時(shí)工作在B通道,三路開(kāi)關(guān)的狀態(tài)隨時(shí)通過(guò)控制電纜以TTL差分方式送給數(shù)據(jù)處理。
在射頻切換控制板中信號(hào)流程如下:監(jiān)控計(jì)算機(jī)發(fā)出的差分切換脈沖經(jīng)差分接收器接收后,進(jìn)入可編程EPLD,在EPLD內(nèi)利用硬件語(yǔ)言實(shí)現(xiàn)了對(duì)切換脈沖的濾波、脈沖判斷、框架判斷等,確認(rèn)該信號(hào)為計(jì)算機(jī)切換命令而不是外來(lái)干擾后,發(fā)出切換信號(hào)到驅(qū)動(dòng)單元,切換信號(hào)經(jīng)驅(qū)動(dòng)單元到開(kāi)關(guān)TN6K31的控制端,實(shí)現(xiàn)切換動(dòng)作。
2 系統(tǒng)實(shí)現(xiàn)的具體細(xì)節(jié)
2.1 信號(hào)濾波與毛刺抑制
二次雷達(dá)監(jiān)控計(jì)算機(jī)發(fā)出的通道切換信號(hào)是脈沖編碼信號(hào)。由于雷達(dá)工作電磁環(huán)境復(fù)雜,所以在系統(tǒng)內(nèi)部要判斷該信號(hào)是否為于擾信號(hào),在系統(tǒng)中首先進(jìn)行切換信號(hào)前、后沿的提取,將切換信號(hào)輸入兩個(gè)寄存器,加以門(mén)電路實(shí)現(xiàn),如圖3所示。
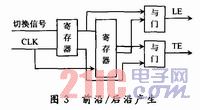
LE與TE分別切換信號(hào)的前沿與后沿,在經(jīng)過(guò)一系列寄存器,使前沿與后沿分別用觸發(fā)器進(jìn)行延時(shí),根據(jù)前沿與后沿間間隔可以判斷出脈沖的寬度,對(duì)于不符合切換條件的毛刺與噪聲進(jìn)行抑制。
2.2 框架檢測(cè)
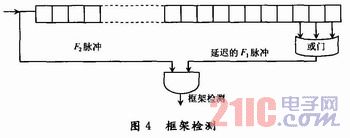
正常情況下,監(jiān)控計(jì)算機(jī)發(fā)出的切換脈沖的兩個(gè)脈沖的間隔為20 ms,在切換控制系統(tǒng)中使用的時(shí)鐘為8.276 MHz,因此,一個(gè)切換命令的兩個(gè)脈沖的時(shí)間間隔就認(rèn)為兩個(gè)前沿間有167,168或169個(gè)時(shí)鐘周期。在該系統(tǒng)中,脈沖編碼的檢測(cè)是根據(jù)比較延時(shí)的前沿與非延時(shí)情況下的重合情況,延時(shí)的前沿對(duì)應(yīng)于框架脈沖F1,非延時(shí)的前沿對(duì)應(yīng)脈沖F2,F(xiàn)1相對(duì)于F2延時(shí)20ms,由于F2相對(duì)于F1有三個(gè)時(shí)鐘脈沖的變化范圍,F(xiàn)2與F1的前沿延時(shí)167,168或169個(gè)時(shí)鐘周期的任一個(gè)對(duì)齊,都認(rèn)為是一個(gè)正確的框架。框架檢測(cè)示意如圖4所示。
3 結(jié)語(yǔ)
雷達(dá)的發(fā)展和更新?lián)Q代不僅對(duì)雷達(dá)的性能提出了更高的要求,而且對(duì)實(shí)現(xiàn)的方式也提出了新的要求。集成度高、性能好、體積小已經(jīng)成為雷達(dá)設(shè)計(jì)的必然要求。飛機(jī)密度的不斷增加,對(duì)雷達(dá)系統(tǒng)的可靠性,提出了更嚴(yán)格的要求,為了提高可靠性,現(xiàn)代雷達(dá)使用雙機(jī)熱備份冗余設(shè)計(jì),雙機(jī)中切換部分的可靠性關(guān)系到雷達(dá)的整體性能,用硬件設(shè)計(jì)語(yǔ)言編程EPLD方法處理二次雷達(dá)的切換信號(hào)具有很大的優(yōu)越性。