
摘要:針對(duì)材料試驗(yàn)機(jī)測(cè)控系統(tǒng)要求精度高,實(shí)時(shí)性好的特性,提出一種基于32位的ARM微處理器SEP3203和實(shí)時(shí)操作系統(tǒng)μC/OS-Ⅱ的電子萬能試驗(yàn)機(jī)測(cè)控系統(tǒng)開發(fā)方案。其中,觸摸屏與LCD合為一體,采用AC97+UCB1400的工作方式來完成圖形用戶界面的設(shè)計(jì);利用24位的CS5530芯片來完成數(shù)據(jù)模擬量的采集。在硬件平臺(tái)基礎(chǔ)上,選用μC/OS-Ⅱ作為控制器的操作系統(tǒng),完成軟件的結(jié)構(gòu)化設(shè)計(jì),通過移植μC/GUI,實(shí)現(xiàn)控制器的人機(jī)接口功能。
關(guān)鍵詞:萬能試驗(yàn)機(jī);ARM微處理器;μC/OS-Ⅱ;CS5530;SEP3203
0 引言
萬能材料試驗(yàn)機(jī)是測(cè)定材料機(jī)械性能的基本設(shè)備之一,主要用作對(duì)金屬、橡膠、塑料、陶瓷和水泥等材料的拉伸、壓縮、彎曲和剪切等機(jī)械性能的試驗(yàn),可完成對(duì)材料的強(qiáng)度、塑性、彈性及韌性的檢測(cè)。隨著國(guó)際化的不斷深入,國(guó)內(nèi)外材料試驗(yàn)機(jī)的發(fā)展主要呈現(xiàn)出計(jì)算機(jī)化、數(shù)據(jù)處理全面化、控制精確化、全面化的特點(diǎn)。
當(dāng)前萬能材料試驗(yàn)機(jī)測(cè)控系統(tǒng)的開發(fā)具有一定的復(fù)雜性,要在盡可能小的空間中集成數(shù)據(jù)采集、處理,人機(jī)界面,串行通信等多個(gè)功能。傳統(tǒng)的單片機(jī)由于功能單一,往往無法滿足要求,或者即使可以實(shí)現(xiàn),也需要使用大量的MCU協(xié)同工作,在信號(hào)連接、編程和減少體積方面,都會(huì)遇到不小的困難。在裸機(jī)上直接開發(fā)運(yùn)行前后臺(tái)系統(tǒng)的開發(fā)、維護(hù)和擴(kuò)展都很困難,而且這樣的系統(tǒng)本質(zhì)上是一個(gè)程序超循環(huán),根本無法保證測(cè)控系統(tǒng)的實(shí)時(shí)性要求。
萬能材料試驗(yàn)機(jī)測(cè)控系統(tǒng)不但要求系統(tǒng)能夠及時(shí)響應(yīng)隨機(jī)發(fā)生的外部事件,對(duì)其進(jìn)行快速處理,還需要同時(shí)執(zhí)行多個(gè)任務(wù),并對(duì)每個(gè)任務(wù)實(shí)時(shí)響應(yīng)。如果使用嵌入式系統(tǒng)技術(shù),則可以使用單片嵌入式CPU,集成多種功能,逐步解決存在的問題。
本文就是基于這樣的背景,提出一種基于SEP3203處理器和實(shí)時(shí)操作系統(tǒng)μC/OS-Ⅱ的高精度萬能材料試驗(yàn)機(jī)測(cè)控系統(tǒng)的實(shí)現(xiàn)。
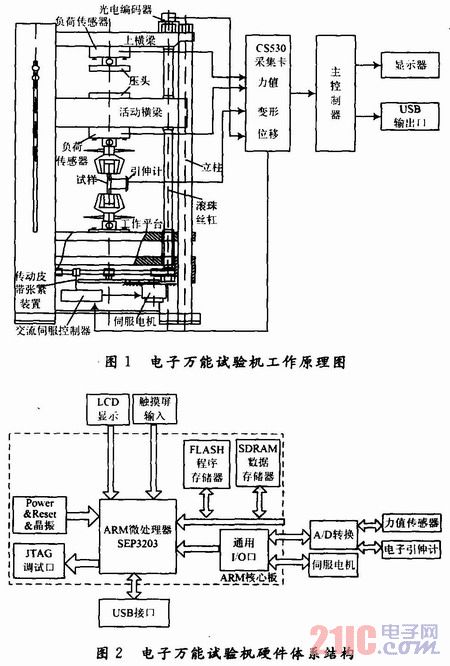
1 系統(tǒng)工作原理
試驗(yàn)機(jī)利用控制器,先經(jīng)交流伺服單元控制電機(jī)運(yùn)轉(zhuǎn),再經(jīng)精密減速器減速后,通過反齒隙游移螺帽由電機(jī)帶動(dòng)雙螺旋絲杠副,驅(qū)動(dòng)動(dòng)橫梁上下移動(dòng),從而實(shí)現(xiàn)對(duì)試樣的加載過程,完成試樣的拉伸、壓縮等力學(xué)性能試驗(yàn)。它的工作原理如圖1所示。在做拉力試驗(yàn)或者其他試驗(yàn)時(shí),由于試驗(yàn)機(jī)的負(fù)荷傳感器與試樣失去平衡,電橋產(chǎn)生一個(gè)弱小的不平衡電壓輸出。該電壓在一定范圍內(nèi)與作用力的大小呈線性正比例關(guān)系。然而試樣在負(fù)荷作用下引起的變形量則通過電子引伸計(jì)獲得。負(fù)荷傳感器和電子引伸計(jì)輸出的小信號(hào)都經(jīng)測(cè)量單元放大處理后,送給控制器數(shù)據(jù)采集輸入端進(jìn)行數(shù)據(jù)處理,得到力和變形量值,同時(shí)繪制出力和變形等特征曲線。此外,動(dòng)橫梁的位移則通過安裝在電機(jī)轉(zhuǎn)軸上的光電編碼器數(shù)字測(cè)量獲得。
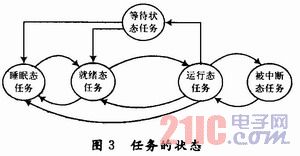
2 測(cè)控系統(tǒng)硬件設(shè)計(jì)
根據(jù)試驗(yàn)機(jī)的功能要求和工作原理,該系統(tǒng)硬件體系結(jié)構(gòu)如圖2所示。
2.1 核心板和電源模塊
核心板上的處理器采用東南大學(xué)博芯公司的SEP3203。SEP3203處理器內(nèi)嵌了英國(guó)ARM公司提供的ARM7TDMI處理器內(nèi)核,內(nèi)嵌20 KB片上零等待靜態(tài)存儲(chǔ)器;集成了支持黑白、灰度、彩色的LCD控制器;支持用于連接觸摸屏通信的SPI協(xié)議。一個(gè)通道實(shí)時(shí)時(shí)鐘模塊,85個(gè)通用I/O口和18個(gè)外部中斷源。
核心板中存儲(chǔ)器部分包括8 MB SDRAM和2 MBNOR FLASH。通過擴(kuò)展插座引入核心板所用到的RESET和WAKEUP功能引腳;通過擴(kuò)展插座將22位地址線和32位數(shù)據(jù)線以及未用的控制信號(hào)擴(kuò)展到母板。
該系統(tǒng)要求多路電源供電,如ARM核心板需要3.3 V和5 V兩路電源;在系統(tǒng)的外圍部件中,LCD控制模塊需要5 V電源供電;A/D轉(zhuǎn)換模塊需要6 V電源同時(shí)供電;伺服驅(qū)動(dòng)器則需要12 V電源供電,所以應(yīng)該對(duì)輸入電源進(jìn)行相應(yīng)的穩(wěn)壓、分路等設(shè)計(jì)。
2.2 外圍通用接口模塊
試驗(yàn)機(jī)控制器的外圍通用接口模塊主要包含通用I/O口、USB接口、JTAG調(diào)試口等。在試驗(yàn)機(jī)系統(tǒng)中,控制器除了要與上下層通信外,主要還涉及到傳感器測(cè)量參數(shù)的數(shù)據(jù)采集和伺服控制信號(hào)的輸出等。同時(shí),開關(guān)量也是測(cè)控現(xiàn)場(chǎng)最簡(jiǎn)單且使用較頻繁的信號(hào)之一,如試驗(yàn)機(jī)動(dòng)橫梁的限位開關(guān)、液晶顯示控制和指示燈的亮滅等。設(shè)計(jì)中采用SEP3203的通用I/口來實(shí)現(xiàn)這些信號(hào)的輸入/輸出。
SEP3203提供了85個(gè)通用I/O口和18個(gè)外部中斷源,無需擴(kuò)展I/O口。使用端口功能時(shí)首先在程序里把引腳功能模式定義好,即將每個(gè)端口配置為輸入模式、輸出模式或中斷功能模式,每個(gè)復(fù)用引腳都有對(duì)應(yīng)的寄存器位來選擇實(shí)際使用的功能模式。該設(shè)計(jì)中,I/O通道使用雙向緩沖器件74LVCH162245A,以增強(qiáng)總線驅(qū)動(dòng)能力。
此外,系統(tǒng)中還添加了2個(gè)USB接口,用于測(cè)試結(jié)果的輸出或作為備用接口。
2.3 信號(hào)采集模塊
信號(hào)采集模塊包括多通道力值采集模塊和多通道變形信號(hào)采集模塊。
力值和變形是系統(tǒng)所采集的最主要信號(hào)。傳感器的電壓信號(hào)輸入到模/數(shù)轉(zhuǎn)換器CS5530中,CS5530的差動(dòng)輸入端可以直接測(cè)量來自傳感器的毫伏信號(hào),這簡(jiǎn)化了與外圍電路的連接。可編程增益放大器能使放大倍數(shù)從1~32進(jìn)行設(shè)定,大大提高了系統(tǒng)的動(dòng)態(tài)特性。多級(jí)程控?cái)?shù)字濾波器可使數(shù)據(jù)輸出速率得到選擇,范圍為7.5 Hz~3.84 kHz,方便了與外設(shè)的連接。另外,CS5530內(nèi)部有一個(gè)完整的自校正系統(tǒng),可以進(jìn)行自校準(zhǔn)和系統(tǒng)校準(zhǔn),從而可消除A/D本身的零點(diǎn)增益和漂移誤差,以及系統(tǒng)通道的失調(diào)和增益誤差。此外,由線性穩(wěn)壓元件7806提供工作電壓,以確保信號(hào)采集精度。
2.4 人機(jī)交互模塊
為了使萬能試驗(yàn)機(jī)測(cè)控系統(tǒng)具有更好的人機(jī)交互界面,便于用戶調(diào)試與操作,需要給其配置顯示裝置,如LCD液晶顯示屏以及信號(hào)燈提示等。另外.要進(jìn)行人機(jī)交互,還得有輸入裝置,使用戶可以對(duì)ARM主控制器發(fā)出命令或輸入必要的控制參數(shù)等,該系統(tǒng)采用觸摸屏輸入。
根據(jù)系統(tǒng)的實(shí)際需要,液晶顯示模塊采用240×320黑白4級(jí)灰度顯示屏,兼容彩色7寸64K彩色TFT液晶屏,觸摸屏與LCD合為一體。觸摸屏采用AC97+UCB1400工作方式。UCB1400的小體積與低電壓(3.3 V)特性使其成為新一代PDA應(yīng)用產(chǎn)品的理想選擇。它集成了先進(jìn)的音頻編解碼、觸摸屏控制器以及電源管理等功能,并以標(biāo)準(zhǔn)、立即可用的產(chǎn)品形態(tài)提供客戶化功能。UCB1400控制器作為液晶顯示屏與ARM的接口,用來直接驅(qū)動(dòng)液晶控制字符、漢字以及圖形的顯示。借助UCB1400,可以直接利用SEP3203的I/O口模擬液晶的讀/寫和控制時(shí)序,使得ARM對(duì)液晶的操作實(shí)際上變?yōu)锳RM對(duì)液晶顯示控制器UCB1400的操作,從而簡(jiǎn)化了接口電路的硬件連接和軟件編程。
3 測(cè)控系統(tǒng)軟件設(shè)計(jì)
μC/OS-Ⅱ是為嵌入式應(yīng)用而設(shè)計(jì)的完全可剝離的實(shí)時(shí)操作系統(tǒng),可以管理64個(gè)任務(wù),其中留給用戶的應(yīng)用程序最多可有56個(gè)任務(wù)。這種RTOS應(yīng)用軟件的開發(fā)過程為:
(1)根據(jù)系統(tǒng)設(shè)計(jì)方案,明確應(yīng)用軟件的功能;
(2)結(jié)合RTOS的并發(fā)特性(或準(zhǔn)并發(fā)特性),對(duì)應(yīng)用軟件要實(shí)現(xiàn)的功能進(jìn)行大小適當(dāng)?shù)膭澐郑簿褪前褢?yīng)用軟件的功能按照一定的原則劃分為若干個(gè)任務(wù)模塊;
(3)對(duì)各個(gè)任務(wù)間的通信和時(shí)延進(jìn)行仔細(xì)的確認(rèn)。
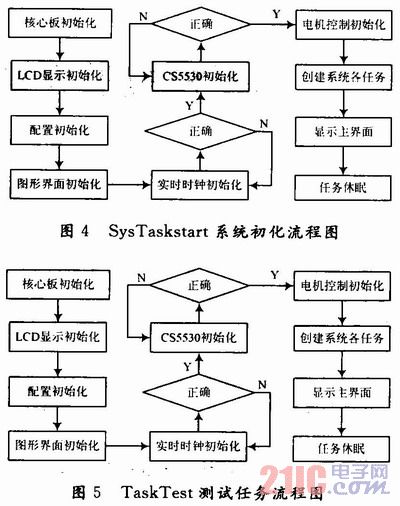
在μC/OS-Ⅱ中,每個(gè)任務(wù)都是一個(gè)無限的循環(huán),都可能處于以下5種狀態(tài):休眠態(tài)、就緒態(tài)、運(yùn)行態(tài)、掛起態(tài)和被中斷態(tài)。任務(wù)狀態(tài)之間的轉(zhuǎn)換如圖3所示。
3.1 測(cè)控系統(tǒng)軟件模塊分析
在該系統(tǒng)中,主要實(shí)現(xiàn)的功能是測(cè)試數(shù)據(jù)(包括力值、位移值)的采集、測(cè)試數(shù)據(jù)在LCD上面的顯示、伺電機(jī)的控制、人機(jī)交互以及數(shù)據(jù)通信等。由于力值和位移值是試驗(yàn)機(jī)系統(tǒng)的2項(xiàng)關(guān)鍵數(shù)據(jù),將直接表征被測(cè)試件的力學(xué)性能,對(duì)采集的實(shí)時(shí)性和精度要求都很高,所以就需要在測(cè)試過程中連續(xù)地將實(shí)時(shí)力值和位移值傳遞給主控制器。主控制器將憑借所獲取的力值和位移值來確定當(dāng)前測(cè)試狀態(tài),確定控制操作。如圖4、圖5所示。
依上所述,將系統(tǒng)劃分為若干任務(wù)模塊,將實(shí)時(shí)性要求高的任務(wù),分配給高優(yōu)先級(jí);將實(shí)時(shí)性要求低的任務(wù),分配給低優(yōu)先級(jí)。該系統(tǒng)任務(wù)的具體劃分見表1。
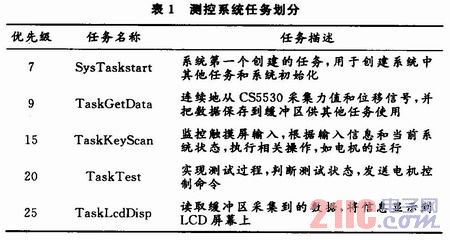
表中,SysTaskstart的任務(wù)主要是完成系統(tǒng)硬件的初始化、用戶配置初始化、圖形界面GUI的初始化及其他任務(wù)的創(chuàng)建等工作。主測(cè)試任務(wù)TaskTest是整個(gè)材料試驗(yàn)機(jī)測(cè)控系統(tǒng)的核心。該任務(wù)用來實(shí)現(xiàn)材料試驗(yàn)機(jī)的測(cè)試邏輯,實(shí)時(shí)讀取力傳感器和位移傳感器的數(shù)值,判斷測(cè)試狀態(tài),依據(jù)不同的狀態(tài)執(zhí)行相應(yīng)的控制操作,以完成測(cè)試,最后保存測(cè)試結(jié)果。
3.2 人機(jī)交互界面設(shè)計(jì)
人機(jī)界面是嵌入式系統(tǒng)的重要組成部分,它可以讓用戶方便地輸入?yún)?shù),執(zhí)行操作,并及時(shí)呈現(xiàn)出必要的信息提示用戶。用戶在測(cè)試材料時(shí),需要頻繁地向控制器發(fā)出不同的操作命令或更改系統(tǒng)參數(shù),因此友好的人機(jī)交互界面是必需的。該系統(tǒng)采用μC/GUI來進(jìn)行人機(jī)界面的設(shè)計(jì)。μC/GUI是一個(gè)源代碼開放的GUI,可以實(shí)現(xiàn)Windows風(fēng)格的圖形界面,微型是它的最大特點(diǎn),同時(shí)它占用很小的系統(tǒng)資源,易于移植,功能強(qiáng)大;可以運(yùn)行在μC/OS-Ⅱ操作系統(tǒng)中;采用了100%的ANSIC編寫,可以應(yīng)用于任何LCD和CPU中;加上其源代碼開放的特點(diǎn),使用起來非常靈活。
4 結(jié)語
該萬能材料試驗(yàn)機(jī)測(cè)控系統(tǒng),以SEP3203微處理器和μC/OS-Ⅱ嵌入式實(shí)時(shí)操作系統(tǒng)為基礎(chǔ),具有精度高,實(shí)時(shí)性好,界面友好等特點(diǎn),其模塊化設(shè)計(jì)便于今后對(duì)故障的查找和系統(tǒng)的改造升級(jí)。