為了支持新型應(yīng)用,如智能手機(jī)之類,個(gè)人通信設(shè)備對(duì)數(shù)據(jù)吞吐速率的要求越來(lái)越高,在給定的帶寬和覆蓋區(qū)域,要提高吞吐速率,必須提高信噪比(SNR),這意味著需要提高功率,或者降低噪聲,或者同時(shí)采取這兩種措施。提高信號(hào)電平的一種方法是使用輸出功率更高的功率放大器(PA),但這種方法會(huì)顯著提高基站的運(yùn)行成本,并且可能導(dǎo)致相鄰小區(qū)的干擾增大。降低接收機(jī)系統(tǒng)噪聲也是可行的,但要在一個(gè)已經(jīng)優(yōu)化的系統(tǒng)上獲得若干dB以上的改善,可能需要付出九牛二虎之力。
如果使用多個(gè)信號(hào)路徑和一個(gè)天線陣列,則可以使天線陣列的聚集輻射場(chǎng)型在目標(biāo)接收機(jī)的方向上具有更高的增益,而在其它方向上的增益則低得多。在目標(biāo)接收機(jī)方向上的較高發(fā)射機(jī)增益可提高接收機(jī)的信號(hào)電平,但同時(shí)也會(huì)對(duì)正好處于發(fā)射機(jī)窄波束內(nèi)的其它接收機(jī)造成更大的干擾。指向發(fā)射機(jī)的較窄高增益接收?qǐng)鲂涂蓽p小相鄰基站和移動(dòng)設(shè)備對(duì)接收機(jī)的干擾。這兩種效應(yīng)均能提高接收機(jī)的信噪比(SNR)。
圖1顯示一個(gè)系統(tǒng)架構(gòu)的框圖,其中四根天線共用同一信號(hào)。中間兩根天線的導(dǎo)體呈回旋狀,目的是強(qiáng)調(diào)所有天線的電纜長(zhǎng)度必須相等。
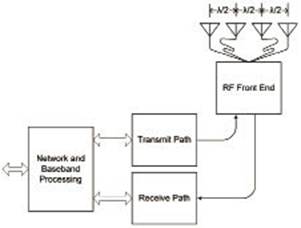
圖1 4天線系統(tǒng)
圖2顯示該系統(tǒng)的仿真響應(yīng),假設(shè)這些天線為全向天線。天線位于穿過(guò)180度和0度的軸線上。該極坐標(biāo)圖的徑向軸表示相對(duì)于單根全向天線的增益(dB)。

圖2 相對(duì)于單根天線響應(yīng)的4天線響應(yīng)(dB)
波束成形和波束控制" title="波束控制">波束控制
圖1中的架構(gòu)可用于目前的許多應(yīng)用中,但要充分發(fā)揮窄波束系統(tǒng)的優(yōu)勢(shì),必須進(jìn)行動(dòng)態(tài)波束控制(移動(dòng)主波束)或波束成形(移動(dòng)主波束和零陷)。波束控制要求基帶處理器(BBP)改變各天線信號(hào)" title="天線信號(hào)">天線信號(hào)的相位,波束成形則要求BBP改變各天線信號(hào)的相位和幅度。除非另有說(shuō)明,本文中的“波束成形”同時(shí)包括波束控制和波束成形。圖3所示為一個(gè)波束成形實(shí)現(xiàn)系統(tǒng)。為清楚起見,圖中僅顯示發(fā)射路徑。

圖3 提供波束控制/波束成形的4天線系統(tǒng)
針對(duì)波束成形設(shè)計(jì)了一些多用戶協(xié)議,例如LTE。在LTE中,BBP可以分別調(diào)整資源模塊(RB)的幅度和相位,因此即使在多用戶子幀中也支持用戶專用的波束。
如果BBP將天線1的數(shù)據(jù)移動(dòng)-0.375λ,將天線2的數(shù)據(jù)移動(dòng)-0.125λ,將天線3的數(shù)據(jù)移動(dòng)+0.125λ,并將天線4的數(shù)據(jù)移動(dòng)+0.375λ,則會(huì)產(chǎn)生圖4所示的輻射場(chǎng)型。在這個(gè)波束控制示例中,BBP僅對(duì)數(shù)據(jù)應(yīng)用相位校正。該圖還顯示兩個(gè)瓣一致移動(dòng)。如果不需要這樣,可以使用定向天線陣列來(lái)消除不需要的瓣,同時(shí)為需要的瓣提供額外增益。
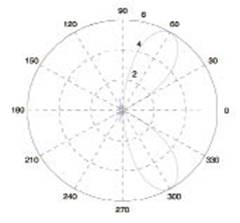
圖4 相對(duì)于單根天線響應(yīng)的控制4天線響應(yīng)
圖2和圖4所示的極坐標(biāo)圖反映的是理想情況,假設(shè)信號(hào)完全按照需要到達(dá)各天線。但實(shí)際上會(huì)存在偏差,導(dǎo)致各發(fā)射路徑都存在獨(dú)特的不良相移。這些相移可能會(huì)在每次系統(tǒng)上電時(shí)改變,而且可能隨著器件溫度的變化而改變。當(dāng)發(fā)射機(jī)使用不同的本振" title="本振">本振,或者當(dāng)?shù)竭_(dá)各發(fā)射機(jī)模塊的本振路徑不同時(shí),這個(gè)問(wèn)題尤其突出。不同路徑長(zhǎng)度、溫度漂移以及發(fā)射機(jī)路徑之間的本振(LO)相位差所引起的不良相位失調(diào),可能會(huì)改變輻射場(chǎng)型,從而使系統(tǒng)性能明顯下降。例如,將區(qū)區(qū)5度的誤差增加到各天線信號(hào)時(shí)(因而天線1 = -0.51λ,天線2 = -0.17λ,天線3 = +0.17λ,天線4 = +0.51λ),其結(jié)果如圖5所示。

圖5 存在不良相移的控制4天線響應(yīng)
測(cè)量相位
顯而易見,對(duì)于波束成形,系統(tǒng)必須能夠測(cè)量各發(fā)射機(jī)輸出的相對(duì)相位失調(diào)。完成相對(duì)相位失調(diào)計(jì)算后,除了用于波束控制的相位和幅度系數(shù)外,BBP還會(huì)對(duì)各信號(hào)路徑應(yīng)用一個(gè)校正因數(shù)。
圖6顯示了一種確定相對(duì)相位失調(diào)的常用方法,即利用系統(tǒng)中的額外接收機(jī)。所示的曲線路徑同樣是為了強(qiáng)調(diào)從各RF前端到RF開關(guān)的路徑長(zhǎng)度必須相等。經(jīng)過(guò)下變頻" title="下變頻">下變頻、濾波和發(fā)射信號(hào)數(shù)字化后,計(jì)算相位Tan-1 (Q/I)以得出各路徑的相位失調(diào)。然后,BBP將這些校正因數(shù)應(yīng)用于波束成形系數(shù)。
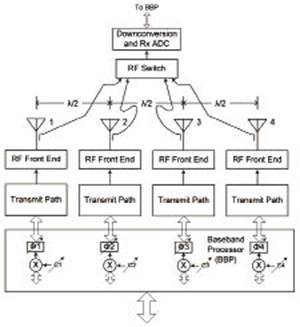
圖6 具有發(fā)射路徑相位檢測(cè)功能的4天線波束成形系統(tǒng)
下變頻處理要求一個(gè)全功能接收機(jī)子系統(tǒng),但接收路徑的最大增益不需要像正常接收機(jī)那樣高。這種解決方案會(huì)增加成本,但波束成形帶來(lái)的利益更大。
通過(guò)集成降低成本
提高集成度可以在保有波束成形好處的同時(shí),降低圖6實(shí)現(xiàn)方案的成本。集成可分為多個(gè)級(jí)別。例如,整個(gè)接收機(jī)子系統(tǒng)或發(fā)射機(jī)子系統(tǒng)可以使用一個(gè)IC以降低成本。進(jìn)一步的集成,例如將多個(gè)發(fā)射機(jī)和接收機(jī)集成到單個(gè)IC中,可以在保持波束成形功能的同時(shí)實(shí)現(xiàn)最低成本解決方案。
對(duì)于時(shí)分雙工(TDD)系統(tǒng),將接收機(jī)和發(fā)射機(jī)集成到同一IC封裝中還能提供其它好處。這種情況下,接收機(jī)和發(fā)射機(jī)并非同時(shí)使用,因此在發(fā)送子幀期間,可以讓接收機(jī)執(zhí)行其它任務(wù),例如測(cè)量發(fā)射機(jī)輸出的相位。圖7所示就是這種架構(gòu)。圖中顯示的是發(fā)送子幀期間的情況。標(biāo)為“Tx Monitor”的模塊是被改派用場(chǎng)的接收機(jī),用于在發(fā)送子幀期間測(cè)量耦合器的功率并提供I/Q數(shù)據(jù)輸出。對(duì)于接收子幀,接收機(jī)電路斷開Tx Monitor輸入,作為正常接收機(jī)工作。
第一個(gè)2x2收發(fā)器" title="收發(fā)器">收發(fā)器的發(fā)射和監(jiān)控路徑使用內(nèi)部LO。第二個(gè)2x2收發(fā)器的發(fā)射和監(jiān)控路徑使用不同的LO。LO的頻率相同,但可能存在相位差,而且每次收發(fā)器上電時(shí),該相位差可能發(fā)生變化。
圖7中,Tx Monitor 2的輸出相位等于ΦAnt1(從發(fā)射路徑中的LO 1到耦合器的延遲)加上ΦTxMon2(Tx Monitor路徑返回LO 1的延遲)。圖中將它表示為Φ(det)。如果兩條粗線路徑匹配,則Tx Monitor 3的輸出 = Φ(det) + ΦAnt2 + ΦLO 2 - ΦLO 1。從該值中減去Φ(det)便得到Ant1與Ant2之間的相位差。其它天線路徑的相位差可以類似方式求得。

圖7 集成波束成形系統(tǒng)
總結(jié)
波束成形是提高覆蓋范圍,同時(shí)減小對(duì)其它小區(qū)干擾的實(shí)用方法。在波束成形中,至關(guān)重要的是系統(tǒng)必須能夠測(cè)量各信號(hào)與其相關(guān)天線的相對(duì)相位。接收機(jī)子系統(tǒng)可以執(zhí)行這種功能,但集成器件能夠在保有波束成形好處的同時(shí),顯著降低成本。ADI公司的AD9356或AD9357 2x2收發(fā)器在同一芯片上集成兩個(gè)接收機(jī)、兩個(gè)發(fā)射監(jiān)控器和兩個(gè)發(fā)射機(jī),還能夠進(jìn)一步降低成本。
