
Freescale的S12系列16位MCU在車身控制系統(tǒng)中應(yīng)用廣泛,用于車身控制器BCM、門(mén)鎖模塊、RKE接收器、智能執(zhí)行器、燈光模塊等車身ECU中。在某整車廠開(kāi)發(fā)的車身控制模塊中,采用MC9S12XS128做為中央處理器,實(shí)現(xiàn)了車身控制的大部分功能,包括門(mén)鎖控制、燈光控制、雨刷控制、車窗控制和防盜報(bào)警,還實(shí)現(xiàn)了CAN/LIN網(wǎng)關(guān)功能,通過(guò)CAN總線接收車速和碰撞信號(hào),從而實(shí)現(xiàn)安全駕駛和緊急操作,通過(guò)LIN總線接收來(lái)自雨量傳感器的信號(hào),控制雨刷的快速、慢速或間歇操作。下面從硬件設(shè)計(jì)和軟件設(shè)計(jì)中的關(guān)鍵技術(shù)方面介紹MC9S12XS128在BCM中的應(yīng)用。
1 硬件設(shè)計(jì)
1.1 MC9S12XS128簡(jiǎn)介
MC9S12XS128是一款針對(duì)汽車電子市場(chǎng)的高性能16位單片機(jī),具有速度快、功能強(qiáng)、成本低、功耗低等特點(diǎn)。其芯片資源及特性如下:
1)總線速度高達(dá)40 MHz;
2)128 KB程序Flash和8 KB DataFlash,用于實(shí)現(xiàn)程序和數(shù)據(jù)存儲(chǔ),均帶有錯(cuò)誤校正碼(ECC);
3)可配置8位、10位或12位ADC,3μs的轉(zhuǎn)換時(shí)間;
4)內(nèi)嵌MSCAN模塊用于CAN節(jié)點(diǎn)應(yīng)用,內(nèi)嵌支持LIN協(xié)議的增強(qiáng)型SCI模塊及SPI模塊;
5)4通道16位計(jì)數(shù)器;
6)出色的低功耗特性,帶有中斷喚醒功能的10,實(shí)現(xiàn)喚醒休眠系統(tǒng)的功能;
7)8通道PWM,易于實(shí)現(xiàn)電機(jī)控制。
1.2 系統(tǒng)結(jié)構(gòu)
基于S12XS128實(shí)現(xiàn)的BCM硬件系統(tǒng)結(jié)構(gòu)如圖1所示。由圖可見(jiàn),BCM硬件電路包括開(kāi)關(guān)信號(hào)檢測(cè)、CAN/LIN通訊、負(fù)載控制及監(jiān)控幾部分。其中開(kāi)關(guān)信號(hào)檢測(cè)通過(guò)多路開(kāi)關(guān)檢測(cè)芯片MC33993實(shí)現(xiàn),LIN通訊通過(guò)UART模塊和LIN總線物理層收發(fā)器TJA1021共同實(shí)現(xiàn),CAN通訊通過(guò)CAN模塊和CAN總線物理層收發(fā)器TJA1055共同實(shí)現(xiàn),負(fù)載控制通過(guò)智能功率器件實(shí)現(xiàn),智能功率器件除了實(shí)現(xiàn)對(duì)負(fù)載的功率驅(qū)動(dòng),還可以提供鏡像工作電流,這樣通過(guò)對(duì)其鏡像工作電流取樣ADC轉(zhuǎn)換便可以監(jiān)測(cè)負(fù)載的工作狀況。
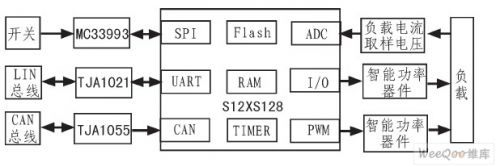
圖1 基于S12XS128實(shí)現(xiàn)的BCM硬件系統(tǒng)結(jié)構(gòu)
1.3 開(kāi)關(guān)信號(hào)檢測(cè)
在BCM的設(shè)計(jì)實(shí)現(xiàn)中,由開(kāi)關(guān)狀態(tài)及其狀態(tài)變化觸發(fā)對(duì)控制負(fù)載的控制是最常見(jiàn)也是最重要的一種控制方式,由于開(kāi)關(guān)信號(hào)繁多,而且BCM的控制負(fù)載多采用10的方式進(jìn)行控制,這樣在XS128的IO引腳有限的情況下,怎樣完成對(duì)多個(gè)開(kāi)關(guān)狀態(tài)的監(jiān)測(cè)成為設(shè)計(jì)中的一大挑戰(zhàn)。同時(shí)對(duì)于電池供電的汽車電子應(yīng)用而言,BCM本身有低功耗的需求,當(dāng)滿足低功耗條件時(shí),進(jìn)入低功耗模式,系統(tǒng)關(guān)斷不必要的模塊,降低功耗;當(dāng)若干特定開(kāi)關(guān)的狀態(tài)發(fā)生變化時(shí),系統(tǒng)需要啟動(dòng)相關(guān)模塊,進(jìn)入正常工作模式,這樣不僅要實(shí)現(xiàn)正常工作模式下的開(kāi)關(guān)狀態(tài)采集及其狀態(tài)變化的捕捉,還需要實(shí)現(xiàn)低功耗模式下的喚醒功能。
對(duì)部分開(kāi)關(guān)信號(hào)采用分立的方式進(jìn)行采集,其余則采用Freescale可編程多路開(kāi)關(guān)檢測(cè)接口芯片MC33993實(shí)現(xiàn),其硬件電路如圖2所示。
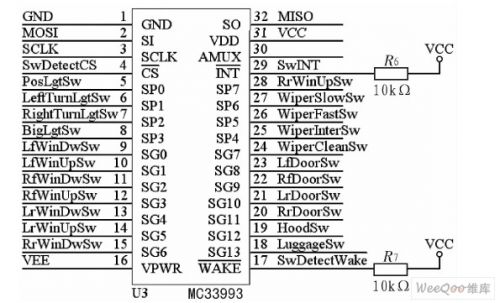
圖2 硬件電路圖
MC33993通過(guò)SPI和處理器通信,可檢測(cè)22路開(kāi)關(guān)量輸入信號(hào),并可以設(shè)置哪些開(kāi)關(guān)通道可以觸發(fā)中斷。首先XS128通過(guò)SPI向MC33993發(fā)送控制命令字,進(jìn)行初始化設(shè)置,設(shè)定MC33993的工作方式,并使能那些中斷喚醒的開(kāi)關(guān)通道的可觸發(fā)中斷功能。在正常工作模式下XS128通過(guò)SPI接口周期讀取MC33993的開(kāi)關(guān)狀態(tài),在低功耗模式下可觸發(fā)中斷的開(kāi)關(guān)通道狀態(tài)發(fā)生變化時(shí),便可以喚醒XS128,進(jìn)入正常工作模式。
2 軟件設(shè)計(jì)
2.1 軟件流程設(shè)計(jì)
BCM的軟件設(shè)計(jì)采用初始化+循環(huán)體的軟件結(jié)構(gòu),軟件流程圖如圖3所示。首先進(jìn)行全局變量和所用外設(shè)(包括IO、ADC、SPI、PWM、TIME-R、SCI)的初始化,然后在循環(huán)體內(nèi)依次進(jìn)行開(kāi)關(guān)信號(hào)檢測(cè)、LIN通信、RKE通信以及負(fù)載控制。對(duì)負(fù)載控制邏輯而言,開(kāi)關(guān)信號(hào)、LIN信號(hào)和RKE信號(hào)都是觸發(fā)其控制操作的輸入信號(hào),而且由于需要把若干開(kāi)關(guān)信號(hào)填充到LIN幀中,所以把負(fù)載控制放在循環(huán)體的最后,各軟件模塊次序如圖3所示。
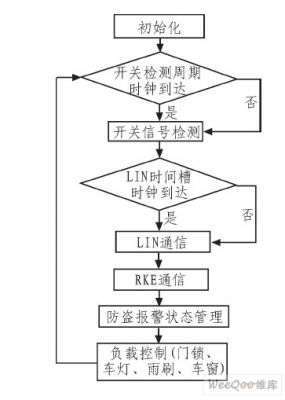
圖3 軟件流程圖
2.2 開(kāi)關(guān)信號(hào)檢測(cè)軟件設(shè)計(jì)
在BCM的開(kāi)關(guān)控制邏輯中,開(kāi)關(guān)信號(hào)的狀態(tài)及其變化經(jīng)常作為某個(gè)控制邏輯的背景條件和激勵(lì)信號(hào),所以在程序設(shè)計(jì)時(shí),對(duì)單個(gè)物理開(kāi)關(guān)信號(hào)需要確定其當(dāng)前狀態(tài)及狀態(tài)跳變(包括開(kāi)關(guān)閉合到斷開(kāi)和開(kāi)關(guān)斷開(kāi)到閉合的變化)。由于BCM需要采集的開(kāi)關(guān)信號(hào)比較多,為了程序的簡(jiǎn)潔和邏輯的清晰,定義一個(gè)結(jié)構(gòu)體將各路開(kāi)關(guān)信號(hào)統(tǒng)一起來(lái),利用結(jié)構(gòu)體的位變量特性節(jié)約變量空間,利用結(jié)構(gòu)的統(tǒng)一性節(jié)約開(kāi)關(guān)信號(hào)檢測(cè)函數(shù)的代碼空間。設(shè)計(jì)結(jié)構(gòu)體如下:
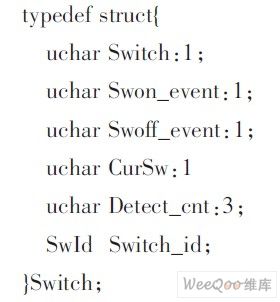
在上述結(jié)構(gòu)體中Switch表示開(kāi)關(guān)信號(hào)的當(dāng)前狀態(tài),Swon_event和Swoff_event分別表示開(kāi)關(guān)從斷開(kāi)到閉合和從閉合到斷開(kāi)的變化,CurSw和Detect_cnt用于開(kāi)關(guān)信號(hào)采集、的軟件消抖功能。設(shè)計(jì)一10 ms的定時(shí)器,周期讀取開(kāi)關(guān)當(dāng)前狀態(tài),3次確認(rèn)以判斷Switch、Swon_event、Swoff_event。其代碼實(shí)現(xiàn)如下:


3 結(jié)束語(yǔ)
采用MC9S12XS128設(shè)計(jì)實(shí)現(xiàn)了一款車身中央控制器BCM,從處理器特性、硬件結(jié)構(gòu)、多路開(kāi)關(guān)擴(kuò)展及開(kāi)關(guān)信號(hào)檢測(cè)等方面描述了BCM的硬件設(shè)計(jì),從軟件流程設(shè)計(jì),開(kāi)關(guān)信號(hào)狀態(tài)監(jiān)測(cè)及變化捕捉的軟件實(shí)現(xiàn)上描述了BCM的軟件設(shè)計(jì)。該BCM經(jīng)裝車試驗(yàn),運(yùn)行穩(wěn)定,功能可靠,已經(jīng)進(jìn)入小批量預(yù)生產(chǎn)階段,具有很高的實(shí)用價(jià)值。