
無人機飛行模擬訓練系統(tǒng)是一種對地面操縱人員進行培訓的仿真軟件,它通過在計算機中建立飛行場景和飛機三維模型,由遙控器輸入指令進行驅動控制,從而實現(xiàn)飛機的飛行仿真。模擬訓練具有在無風險、無器材消耗的條件下訓練飛行操縱人員的特點,可以節(jié)約大量的訓練經費和訓練時間。在無人機飛行模擬訓練系統(tǒng)的設計過程中,首先要解決的問題是遙控器和計算機之間的通訊,以便把遙控器產生的遙控指令送到計算機中。由于遙控器本身不帶USB口,不能和計算機直接相連,因此需要設計USB接口電路完成通訊功能。
1 硬件設計
從理論上來講,遙控器與PC機的連接可以設計成并口、串口、USB口等多種連接方式,并可以根據(jù)不同的連接方式設計相應的接口電路。然而實際的情況是:并口通訊雖然傳輸速度快,但連線多,抗干擾性差,連線不能過長,操縱使用不便;RS232串口通訊使用方便,傳輸距離也較遠,但目前的PC機卻很少再設計有232串口,因此串口方式的使用也受到了限制。同時,由于USB具有傳輸速率高、支持熱插拔以及即插即用等優(yōu)點,當前的計算機普遍配置有多個USB口,因此采用USB接口進行通信更簡單高效。
USB接口電路的硬件結構如圖1所示,它主要由信號調理電路、控制單片機、USB接口模塊組成。

1.1 遙控器及指令編碼格式
無人機飛行模擬訓練系統(tǒng)所使用的遙控器是通用的Futaba 4通道遙控器,其外形如圖2-a所示,它主要包括一個脈沖編碼電路和一個高頻發(fā)射電路。脈沖編碼指的是以不同的脈沖數(shù)目、脈沖寬度、脈沖位置或者不同的脈沖組合來代表不同的控制指令的編碼方式。目前使用的遙控器編碼方式主要有PPM和PCM兩種,大多數(shù)遙控器同時具備這兩種編碼功能,使用時可根據(jù)需要選取其中一種。操縱器背面一般都設有教練口,如圖2-b所示。編碼電路產生的遙控指令編碼信號一方面送到高頻發(fā)射電路,一方面還送到教練口輸出,因此教練口送出的也是PPM或PCM信號。
相比較PCM編碼而言,PPM編碼更具有一定的規(guī)律性,因此系統(tǒng)設計中選擇的是對PPM編碼的指令格式進行處理。以4通道的遙控器為例,PPM編碼格式的脈沖波形如圖3所示。
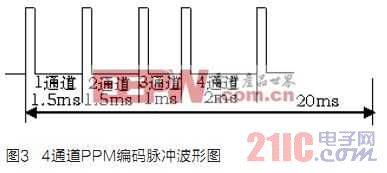
圖中為一組4通道的脈沖串,其脈沖串寬度為20ms,共由5個脈沖組成,它所攜帶的信息是各通道PWM信號的占空比,其中1通道1.5ms,2通道1.5ms,3通道1ms,4通道2ms。當操縱相應通道的操縱桿時,對應通道的脈沖低電平寬度會出現(xiàn)變化,也就是下一個脈沖出現(xiàn)的位置會變化,但脈沖串總的周期不變,一直保持20ms。
1.2 信號調理電路
PPM格式的指令編碼信號由遙控器的教練口輸出,由于信號的電平幅度與單片機不匹配,所以要經過信號調理電路對電平幅度進行變換,然后送給控制單片機進行指令譯碼。
1.3 控制單片機
控制單片機的作用是對脈沖信號進行譯碼,并把譯碼以后的結果輸出。由于PPM編碼輸出的是一系列脈沖信號,故單片機的譯碼可以采用外部中斷的方式,測量脈沖間隔(即每個通道的脈寬信號),然后以串行信號的格式送給USB接口模塊。
1.4 USB接口模塊
USB接口模塊采用的是芯片CH340 ,它是一個USB 總線的轉接芯片,可以實現(xiàn)USB 轉串口、USB 轉IrDA 紅外或者USB 轉打印口。
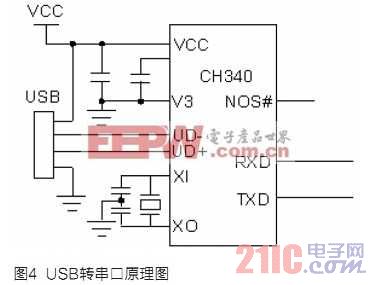
采用CH340設計USB接口電路,不需要了解任何USB協(xié)議和編寫任何固件程序,可以實現(xiàn)USB 與串口的轉換(原理圖如圖4所示),并且可以使用現(xiàn)有的驅動程序,易于迅速開發(fā)使用。本系統(tǒng)設計中所采用的是將USB轉3線制RS232 串口,應用于單片機與PC機之間的數(shù)據(jù)通信,這樣一來,就會在計算機上產生一個虛擬的COM口,用戶只需按照通用串行口一樣使用USB口即可。這樣不僅能使單片機具備USB通信的諸多優(yōu)點,簡化了USB編程,同時還可以利用USB對控制單片機提供5V的工作電源(500mA以下)。
2 軟件設計
軟件設計的重點是遙控指令信號的讀取以及單片機與PC機之間的通訊。
2.1 遙控指令信號的讀取
遙控指令信號的讀取是由控制單片機利用外部中斷的方式來實現(xiàn)的,每個脈沖到來時進入中斷一次,然后讀取脈沖寬度并判斷是否是同步脈沖。正常的脈寬信號標準在1ms到2ms之間,同步脈沖信號的脈寬大于2ms。如果讀到的脈寬大于2ms,就表示下一個脈沖串開始了,需要更新每個通道的脈寬值;如果讀到的脈寬不大于2ms,表示這仍然是某個通道的脈寬,把它送到相應的數(shù)組中儲存起來,接著讀取下一個通道的脈寬,直至同步脈沖的到來。
2.2 單片機與PC機之間的串行通訊
串行通訊主要實現(xiàn)單片機譯碼結果(即通道脈寬值)的發(fā)送,把讀取的指令脈寬信號利用串行中斷,經串口發(fā)出,再經過USB接口電路發(fā)送到上位機,由計算機完成對操縱指令的讀取和識別,從而獲取遙控器操縱舵量的方向和大小。
正常情況下,每一串信號都有固定的脈沖個數(shù),如果計算機讀到的信號個數(shù)發(fā)生了變化,說明在信號傳輸過程中遇到了干擾。為了預防干擾造成的飛機在飛行中出現(xiàn)誤動作,軟件在脈沖數(shù)判斷方面采取了一些抗干擾措施。當發(fā)現(xiàn)信號個數(shù)發(fā)生變化時有幾種處理方法:一是保持上次正確的數(shù)值不變;二是取各個通道的中間值;三是取某一預先設定的固定值。本系統(tǒng)設計中采用的是第一種方法,即把當前讀到的一串脈寬數(shù)丟掉,保持上次脈寬數(shù)值不變。
3 系統(tǒng)調試和檢查方法
在PC機上利用串口調試助手,通過讀取遙控器的指令,可以對USB接口電路進行調試和檢查,步驟如下:
(1)通過教練口把遙控器輸出的PPM指令信號與USB接口電路信號輸入端相連;
(2)安裝USB驅動并獲取虛擬的串口號。當?shù)谝淮伟裊SB接口電路的USB插頭插入計算機時,計算機系統(tǒng)會彈出發(fā)現(xiàn)新硬件的提示,并要求安裝相應的USB驅動程序;接下來把CH340芯片驅動(驅動程序可在網上下載)按照提示步驟逐步安裝。驅動程序安裝完成后,系統(tǒng)會自動增加一個COM口,并可以在計算機屬性的硬件管理中的串口項查到計算機為該虛擬串口分配的串口號,用戶就可以按照傳統(tǒng)的串行口控制方式來使用這個虛擬COM口,這樣一來就把USB設備虛擬為一個串行設備;如果不是第一次使用,就不需要重新安裝驅動,只需記住虛擬的串口號。
(3)運行串口調試助手,選擇串行端口號與計算機為USB分配的虛擬串口號一致,設置與接口電路相同的通訊參數(shù)(波特率、奇偶校驗位、數(shù)據(jù)位、停止位等),然后打開串口。
(4)打開遙控器電源開關,并選擇工作于PPM編碼方式。此時,在串口調試助手界面的數(shù)據(jù)接收區(qū)就會顯示出遙控器各個通道對應的脈寬數(shù)據(jù)。操縱遙控器不同的操縱桿,就會發(fā)現(xiàn)對應的脈寬數(shù)據(jù)發(fā)生改變。
4 結論
利用單片機外部中斷方式對遙控器教練口輸出的PPM指令信號進行譯碼,通過USB接口電路實現(xiàn)與計算機的通信,不僅實現(xiàn)了對指令信號讀取,而且簡化了外設接口和編程,省去外接電源;在計算機上用USB口虛擬出串行口,既可以克服由于USB接口協(xié)議的復雜性給用戶帶來的不便,又可以簡化計算機與單片機之間的接口,它的使用與普通的USB外設相同,只是第一次插入PC機USB接口時,系統(tǒng)會提示安裝相應的驅動程序。該接口電路已經過驗證,并應用到飛行模擬器中。