
引 言
工業(yè)上用32位單片機PIC32MX460F512L來控制帶觸摸屏的液晶顯示器是一種理想的方案。本文使用PIC32MX460F512L的并行接口模塊,按照8080時序驅(qū)動所羅門公司的SSD1926芯片,實現(xiàn)了5.7 in TFT彩色液晶觸模屏的觸摸和顯示功能。該方案在噴水織機控制應用中,已經(jīng)整體實現(xiàn)了數(shù)據(jù)輸入/輸出、數(shù)據(jù)存儲、數(shù)據(jù)處理及傳輸?shù)纫幌盗猩衔粰C功能,而且用戶界面友好。
1 PIC32MX與SSD1926的接口電路
SSD1926是一款中小規(guī)模的顯示控制芯片。采用128引腳LQFP封裝,256 KB靜態(tài)存儲空間和2D圖像引擎,可以支持單色和彩色LCD;32位內(nèi)部數(shù)據(jù)通道,可以提供高帶寬的顯示內(nèi)存,以實現(xiàn)快速的屏幕刷新;擁有MMC/SD接口,可以與SD卡等外部存儲器件方便地進行數(shù)據(jù)交換;采用單電源供電和單時鐘輸入,具有很短的CPU訪問延遲時間,可以支持無READY/WAIT信號的微處理器。這些特點能夠極大地簡化外圍電路的設(shè)計。同時,SSD1926還具有強大的總線兼容性,可與多種類型的MCU連接,除了支持SRAM接口與ARM系列連接、ISA接口與NEC系列連接外,還支持8/16位8080時序間接尋址方式,能夠方便地與各種具有并口的MCU連接。本文使用:PIC32MX460F512L的8位/16位并行控制接口模塊與SSD1926接口。硬件接口框圖如圖1所示。
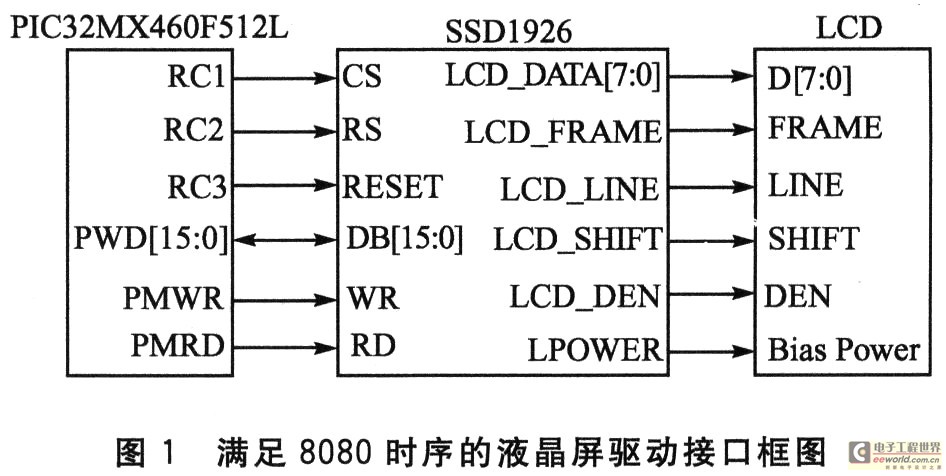
CS為片選信號,RS為地址與數(shù)據(jù)選擇信號,RESET為復位信號,都可以由通用I/O口進行控制,分別用RC1、RC2和RC3與其連接。數(shù)據(jù)總線DB[15:0]與并行控制接口模塊中的PMD[15:0]引腳分別對接。WR和RD為讀寫信號,由并行控制接口模塊中的PMWR和PMRD引腳分別控制。SSD1926對接收到的數(shù)據(jù)進行處理之后,再通過與LCD的接口驅(qū)動TFT彩色液晶屏進行顯示。
2 觸摸功能的軟硬件設(shè)計
電阻式觸摸屏處于與外界完全隔離的工作環(huán)境,不怕灰塵和水汽,可以用任何物體來觸摸,可以寫字畫圖,廣泛應用于工業(yè)控制領(lǐng)域中。觸摸屏工作時,上下導體層可以看作電阻網(wǎng)絡(luò)。當某一層電極加上電壓時,會在該電阻網(wǎng)絡(luò)上形成電壓梯度。若外力使得上下兩層電極在某一點相接觸,則在電極未施加電壓的另一層可以檢測出接觸點的電壓,從而換算出接觸點的坐標值。本文選用4線電阻式觸摸屏,其電阻網(wǎng)絡(luò)工作原理如圖2所示。
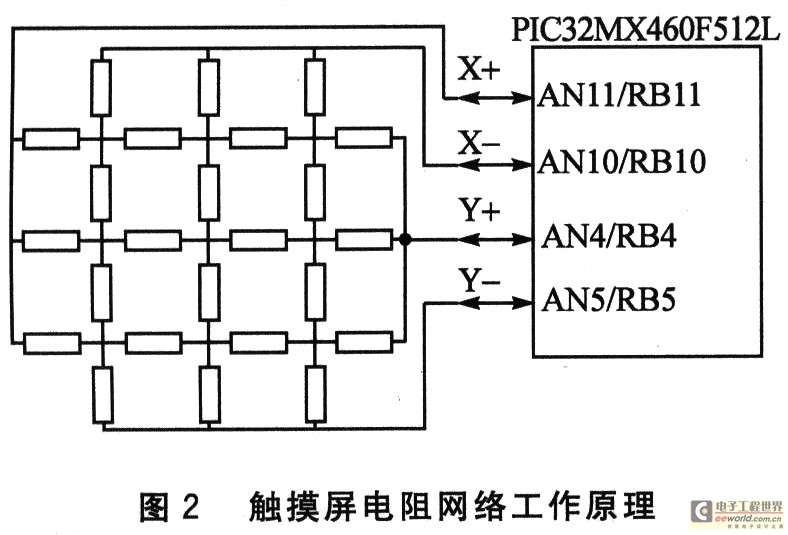
系統(tǒng)工作時,首先把AN11/RB11、AN4/RB4復用引腳設(shè)置為I/O引腳。RB11輸出高電平(+3.3 V),RB4引腳輸出低電平(0 V),在頂層的電極X+、X-上即產(chǎn)生了3.3 V的電壓。當有外力使得上下兩層在某一點接觸時,在底層Y+、Y-引腳上就會輸出接觸點處的電壓。此時,AN10/RB10、AN5/RB5設(shè)置為A/D輸入通道。采樣此引腳上的電壓信號,即可得到Y(jié)+、Y-引腳上的電壓值,根據(jù)下式可以計算出X坐標:
觸點X坐標=X軸分辨率×X相電壓采樣值/1 024
本文為10位精度A/D采樣,3.3 V輸入時對應的采樣值即為1 024。然后,改變4個引腳的輸出定義,將A/D輸入引腳RB10設(shè)置為I/O引腳輸出高電平,RB5設(shè)置為I/O引腳輸出低電平,將3.3 V電壓切換到底層電極Y+、Y-上,設(shè)置AN11和AN4為A/D輸入引腳。對X+、X-引腳進行A/D采樣,測量得到接觸點處的Y相電壓,根據(jù)下式可以計算出Y坐標:
觸點Y坐標=y軸分辨率×y相電壓采樣值/1 024
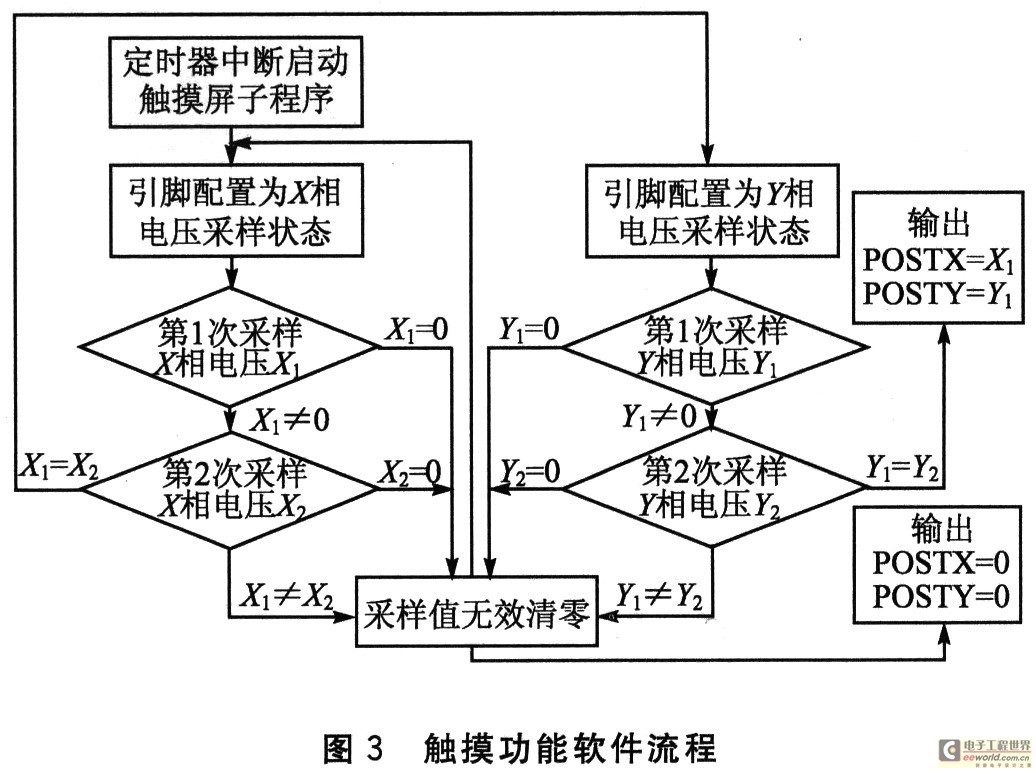
在工業(yè)應用中,由于A/D采樣信號為模擬量輸入,很容易受到現(xiàn)場環(huán)境的電磁干擾。除了在硬件上設(shè)計濾波電路等抗干擾措施外,還需要在軟件中設(shè)計抗干擾算法,具體軟件流程如圖3所示。通過采樣兩次輸入進行比較的方法,能夠有效地減少由A/D采樣模擬信號源帶來的干擾。根據(jù)采樣得到的X、Y坐標值,能夠準確地知道觸摸屏上接觸點的位置,再根據(jù)X、Y坐標的歷史值,還能夠分析出接觸點的狀態(tài)是接觸、移動,還是放開等狀態(tài)。
3 顯示觸摸功能的綜合實現(xiàn)
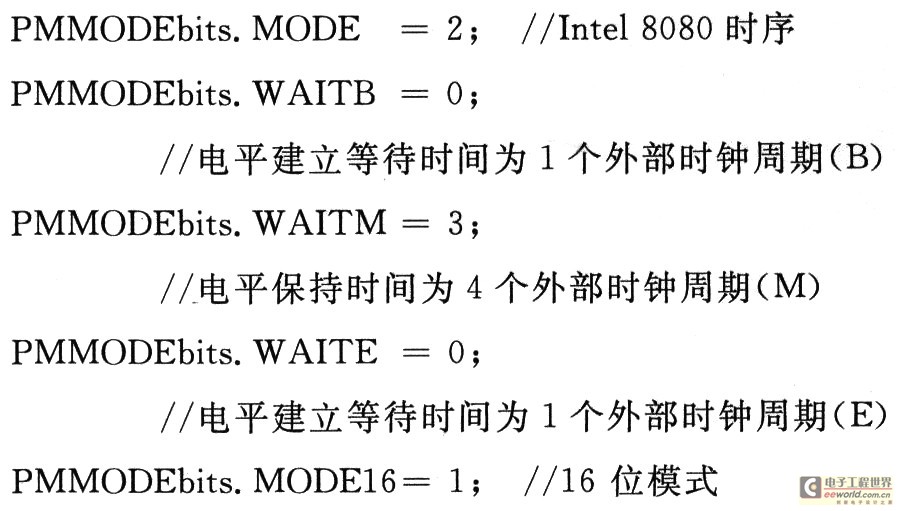
PIC32MX系列的并行控制接口模塊功能非常強大,只需要對其寄存器進行正確的初始化配置,即可自動適應各種并行接口的時序要求。當需要進行讀寫指令切換時,只需要改變讀寫狀態(tài)寄存器的值,芯片就會根據(jù)初始化配置時設(shè)置的值自動產(chǎn)生時序電平。在進行寫操作時,芯片也會根據(jù)設(shè)置的值,自動使數(shù)據(jù)信號達到所要求的建立電平和保持電平的時間。SSD1926相對應的寄存器配置如下:
并行接口數(shù)據(jù)傳輸時序如圖4所示。[next]

圖4中,CS信號為片選信號,對SSD1926進行操作時在整個操作周期中保持高電平。RS信號為地址與數(shù)據(jù)選擇信號,寫地址時保持低電平,寫數(shù)據(jù)時保持高電平。PMWR為寫操作使能信號。當寫操作開始時,首先等待1個外部時鐘周期(B),確保PMD[15:0]上的數(shù)據(jù)或地址信號已穩(wěn)定建立;然后保持3個外部時鐘周期的高電平(M),確保信號內(nèi)容完全寫入SSD1926;最后用1個外部時鐘周期(E)結(jié)束寫操作。BUSY信號為PMMODEbits.BUSY寄存器的狀態(tài)。進行讀寫操作時,BUSY信號自動置高;只有讀到BUSY信號為低時(表示上一次操作已完成,總線空閑),程序才能開始下一次讀寫操作。把對應I/O口和寄存器的操作編程集成起來,編寫為子程序,可方便地在主程序中實現(xiàn)PIC32MX系列單片機與SSD1926之間的數(shù)據(jù)傳輸。人機界面主程序框圖如圖5所示。
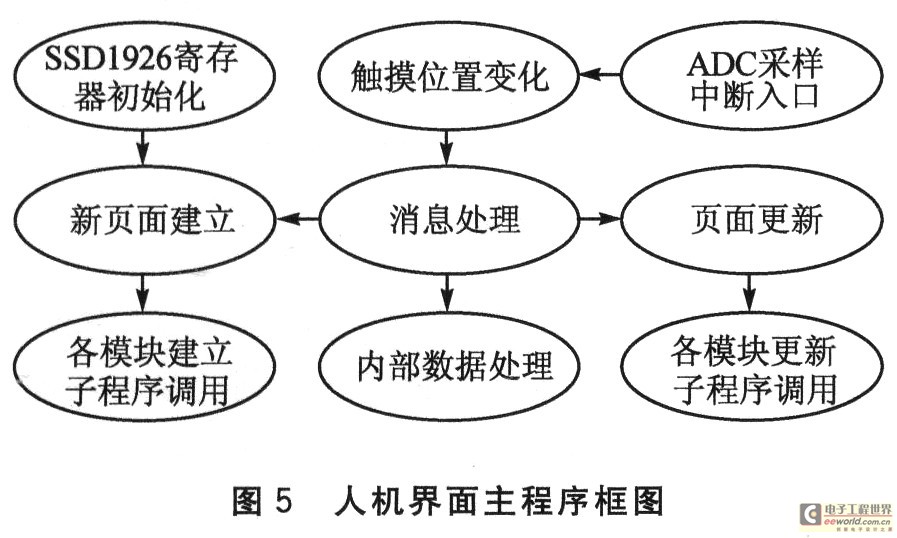
當A/D采樣得到的接觸點X、Y坐標發(fā)生變化時,消息處理函數(shù)根據(jù)得到的消息發(fā)出相應的指令。除了進行數(shù)據(jù)輸入/輸出和與下位機通信外,當需要進行頁面切換時,就更改頁面狀態(tài),調(diào)用“新頁面建立”函數(shù),切換到新的頁面;當需要進行頁面內(nèi)容更新時,就調(diào)用“頁面更新”函數(shù),更新當前頁面的狀態(tài)。
為了簡化編程,軟件中定義了幾種常用的圖形模塊,如按鍵、靜態(tài)圖片、靜態(tài)文字段、動態(tài)數(shù)據(jù)顯示框等。每個模塊都具有模塊創(chuàng)建、模塊更新和消息響應3個子程序。模塊創(chuàng)建子程序根據(jù)模塊的上下左右坐標、模塊的顏色、模塊的內(nèi)容及狀態(tài)等參數(shù),在液晶顯示器的對應位置上顯示出模塊的圖案,并在對應的內(nèi)存空間中記錄下模塊的狀態(tài)。模塊更新子程序定義了模塊不同狀態(tài)下圖案的變化,比如按鍵模塊當被觸摸時即顯示出3D效果的凹陷圖案,未被觸摸時即顯示3D效果的凸出圖案。消息響應子程序則根據(jù)A/D采樣得到的接觸點X、Y坐標,判斷模塊是處于觸摸過程的接觸、移動還是放開狀態(tài),并對狀態(tài)進行響應。Microchip公司特別針對PIC32MX系列還開發(fā)了圖形軟件庫(graphics library)。該軟件可以方便地把各種語言、各種字體的文字以及位圖格式的圖片轉(zhuǎn)化為能夠在軟件中直接使用的數(shù)組矩陣,極大地方便了用戶。
4 應用情況
該方案已經(jīng)成功應用在了某公司自主開發(fā)的噴水織機上。圖6為該噴水織機上本系統(tǒng)的實物圖。

噴水織機是采用噴射水柱牽引緯紗穿越梭口的無梭織機。為了完成開口、引緯、打緯、卷取、送經(jīng)過程,需要多單元高精度的協(xié)同配合工作。舊式的噴水織機完全靠機械齒輪齒條傳動的方式,一旦更換織造品種,就得更換大.量齒輪齒條,改變傳動比;而且由于機械精度及強度的限制,很難提高織造的速度。
采用CAN總線電氣一體化控制策略的電控噴水織機,能夠利用CAN總線高速傳輸?shù)哪芰σ约敖涣麟姍C伺服系統(tǒng)的高精度,實現(xiàn)多單元的高度協(xié)同工作,大幅度提高織造速度和質(zhì)量;并且更換織造品種時只需要進行相關(guān)參數(shù)的調(diào)整,無需改變機械傳動比。
由于電氣單元和交流伺服電機的引入,需要設(shè)置大量的參數(shù),而且需要及時、準確的故障報警,以監(jiān)測織機系統(tǒng)狀態(tài)并方便織機系統(tǒng)的維護。為此,我們設(shè)計開發(fā)了人機界面。它以PIC32MX460F512L芯片和液晶觸摸屏為核心,具有精度高、價格低、抗干擾能力強、簡化了輸入輸出設(shè)備等優(yōu)點。系統(tǒng)通過I2C總線與片外EEPROM接口,能夠方便地保存用戶由界面輸入的數(shù)據(jù);通過I2C總線與日歷時鐘芯片接口,能夠得到準確的時間信息;采用CAN通信方式與電機控制器通信,將設(shè)置的參數(shù)及時傳輸42給主控制器,并把用戶需要的數(shù)據(jù)實時顯示在液晶顯示屏上;具備故障監(jiān)測和自動報警功能,實現(xiàn)了電氣智能化控制。系統(tǒng)結(jié)構(gòu)框圖如圖7所示。

5 結(jié) 論
本文介紹了帶觸摸屏的液晶控制器SSD1926與數(shù)字信號處理器PIC32MX460F512L的接口電路,并行接口時序的模塊化實現(xiàn),以及電阻式觸摸屏的觸摸功能。實踐證明,這種方案具有完善的漢字顯示和圖形顯示功能,占用引腳少,程序模塊化強,編寫方便;觸摸功能可以取代應用系統(tǒng)中的鍵盤模塊,具有良好的人機交互功能。該方案已經(jīng)用于噴水織機中,效果良好。