
1. 需求分析
本系統(tǒng)的設計首先必須了解交通路燈的亮滅規(guī)律。設有一個十字路口,1、3 為南,北方向, 2、4 為東,西方向,初始態(tài)為4 個路口的紅燈全亮。之后, 1、3 路口的綠燈亮,2、4 路口的紅燈亮, 1、3 路口方向通車。延遲一段時間后, 1、3 路口的綠燈熄滅,而1、3 路口的黃燈開始閃爍。閃爍若干次后, 1、3 路口的紅燈亮, 同時 2、4 路口的綠燈亮, 2、4 路口方向開始通車。延遲一段時間后, 2、4 路口的綠燈熄滅,而黃燈開始閃爍。閃爍若干次后,再切換到1、3 路口方向。之后,重復上述過程。對于各組燈的亮滅,我們運用的是8255A 的輸入輸出功能。
2. 對于各組燈亮滅的時間控制方案
A 利用軟件 –程序來完成對時間延時的控制。
此方案特點:軟件定時是最簡單的定時方法,它不需要硬件支持,只要讓機器循環(huán)執(zhí)行某一條或一系列指令,這些指令本身并沒有具體的執(zhí)行目的,但由于執(zhí)行每條指令都需要一定的時間,重復執(zhí)行這些指令就會占用一段固定的時間。因此,習慣上將這種延時方法稱為軟件延時。通過正確的選取指令和改變定時時間,靈活方便,而且節(jié)省費用。這種方法的缺點明顯就是CPU 的利用律太低,在指定的循環(huán)期,CPU 不能去做任何其他有用的工作,而僅僅是在反復的循環(huán),等待預定的定時時間到來,在許多情況下這樣是不允許的[1]。比如,對動態(tài)存儲器的定時刷新操作,只要處于開機狀態(tài),就需要一直不停地進行下去,顯然不能采用軟件延時。
B.利用芯片8253 芯片定時控制紅綠燈的亮滅時間。
此方案特點:可編程定時器/計數(shù)器利用硬件電路和中斷的方法控制定時,定時時間和范圍完全有軟件來確定和改變,并有微處理器的時鐘信號提供時間基準,因這種時鐘信號由晶體震蕩器產(chǎn)生,故計時精確穩(wěn)定。但該時鐘信號頻率太高,所以要把它送到專門的計數(shù)器/定時器芯片進行分頻后,才能產(chǎn)生個中所需要的定時信號。用可編程定時器/計數(shù)器電路進行定時時,先要根據(jù)預定的定時時間,用指令對計數(shù)器/定時器芯片設定計算初值,然后啟動芯片進行工作。計數(shù)器一旦開使工作后,CPU 就可以去做別的工作了,等計數(shù)器到了預定的時間,變自動形成一個輸出信號,該信號可以向CPU 提出中斷請求,通CPU 定時時間已到,使CPU 做相應的處理[2]。或者直接輸出信號啟動設備去工作。這種方法不但顯著提高了CPU 的利用率,而且定時時間由軟件來設置,使用起來十分的靈活方便,加上定時時間又很精確,所以獲得了廣泛的應用。
由上可知,該模擬系統(tǒng)設計的目的是控制車輛的有序流動,CPU 在程序執(zhí)行過程中并沒有其他的工作要做只是單一的使程序正常運行,所以也就不用考慮其利用率的問題的,在從節(jié)省資金的方面考慮第一種方案比第二種少用一個8253,而且第一種方案只用一個芯片在維修方面也比第二種方案方便。綜合這些因素,我們最終選擇第一種方案作為我們的設計方案。
3. 電路設計及功能
3.1 8255 原理及接線圖
8255 是一種通用可編程并行輸入輸出接口芯片,通過對它進行編程,芯片可工作于不同的工作方式,用8255 作接口時,通常不需要附加外部邏輯電路就可直接為CPU 與外設之間提供數(shù)據(jù)通道,8255 內(nèi)部包含3 個8 位輸入輸出端口A,B,C,通過外部24 根輸入輸出線與外設交換數(shù)據(jù)或進行通信聯(lián)絡。端口A 和端口B 都可以用作一個8 位的輸入口或8 位的輸出口,出口既可作8 位輸入輸出口又可分為兩個4 位輸入輸出口,還常常用來配合A口和B 口工作,用來產(chǎn)生A 口和B 口的端口狀態(tài)信號,8255A 有兩類控制字,一類控制字用來定義各端口的工作方式,稱為方式選擇控制字,另一類控制字用于對C 端口的任一位置進行置位或者復位操作,稱為置位復位控制字對8255A 進行編程時這兩種控制字都要寫入控制字寄存器中,但方式選擇控制字的D7 位總是1,而置位復位控制字的D7 位總是0[3]。
3.2 系統(tǒng)設計應注意的問題
A .程序中應設定好8255A 的工作模式,使三個端口均工作于方式0,并處于輸出態(tài)[4]。
B. 8255A 的A 端口地址為:300H, B 端口地址為: 301H, C 端口地址為: 302H, 控制口地址為:303H
C.8255A 可編程并行接口芯片的特性和編程命令: 8255A 具有兩個人8 位(A 口和B 口)和兩個4 位(C 口高/低4 位)并行I/O 端口。
4. 軟件模擬界面
軟件模擬界面如圖1 所示。
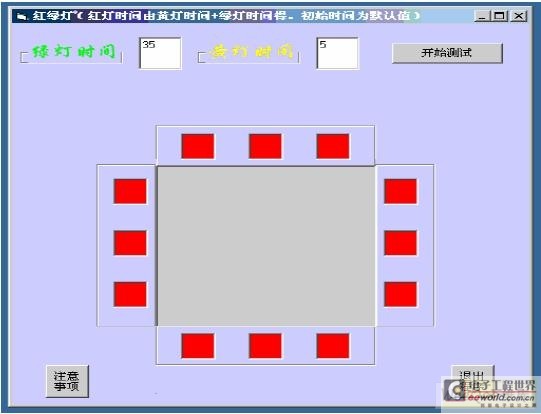
圖1 軟件模擬界面
5. 軟件模擬流程圖
軟件模擬流程圖如圖2 所示。
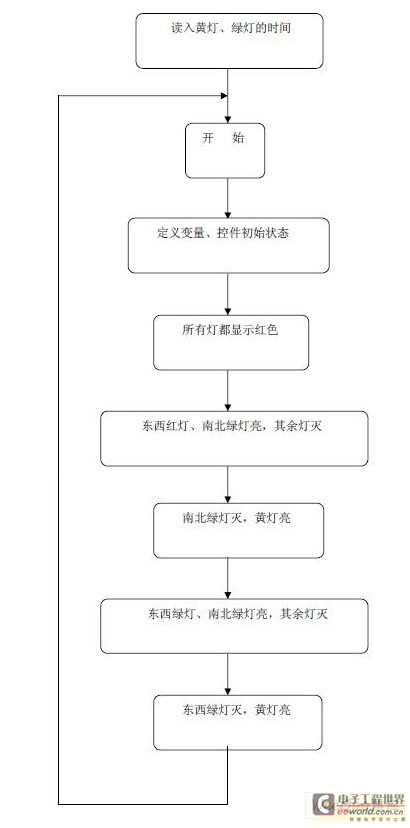
圖 2 軟件模擬流程圖示意
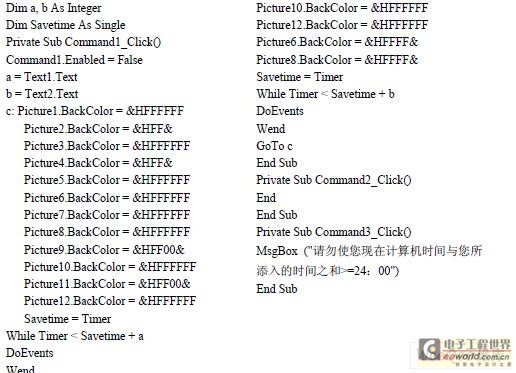
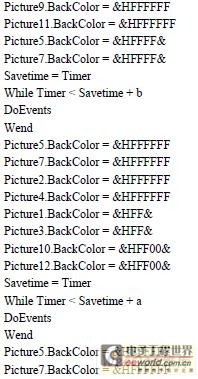
6. 系統(tǒng)核心程序代碼
7. 測試與分析
編寫次程序的時候遇到的主要問題及解決方案:
A. 延時問題的解決:作者查閱了許多相關資料,最后選中程序中所用到的提取系統(tǒng)時間的這個方法,其原因主要是因為這段語句比較短,不容易出錯,但是有一個缺點就是不能使所添入的時間加上系統(tǒng)時間大于等于24:00,要不就會出錯,但是這個缺陷可以人工避免。
B. 循環(huán)問題的解決:針對該問題作者也嘗試了很多方法,但最后選擇了GOTO 跳轉語句解決這個問題。雖然在高級程序語言中我們并不提倡使用GOTO 語句,但由于我們在此使用的匯編語言需要經(jīng)常性地與硬件交互[5],使用該語句反而會使得問題解決起來最簡單,最方便,程序易懂,且不易出錯。
8. 結論
電子設計正在當今社會發(fā)揮越來越重要的作用,其采用的軟硬件結合技術也逐漸成熟,該模擬系統(tǒng)正是采用軟硬相結合的方法實現(xiàn)的[6]。該模擬交通紅綠燈的設計實現(xiàn)對于讀者了解在我們?nèi)粘I钪邪l(fā)揮巨大作用的交通指揮系統(tǒng)很有幫助,其對于交通燈原理的揭示對于電子設計的探索研究提供了思路,相信隨著時代的發(fā)展,我們能見證更多更好的電子設計產(chǎn)品問世。