
1.1 設(shè)計任務(wù)
(1)設(shè)計出小型化的地面傳感器系統(tǒng),可在一定范圍內(nèi)識別人員、輪式和履帶車輛目標(biāo),并發(fā)送識別結(jié)果到接收顯示子系統(tǒng)。探測范圍200-400米。
(2)技術(shù)參數(shù):額定輸入電壓DC 12V,采用78M05轉(zhuǎn)換出DC 5V的電壓供DSP系統(tǒng)、無線收發(fā)模塊和異步串口使用。
(3)具有系統(tǒng)自檢和準(zhǔn)確顯示識別結(jié)果的功能。
1.2 采用的器件
采用TMS320VC5509A數(shù)字信號處理芯片作為地面?zhèn)鞲衅飨到y(tǒng)的主控芯片。TMS320VC5509A是一種高性能16位定點數(shù)字信號處理器,其資源可以完成震動和聲信號采樣和目標(biāo)識別功能。傳感器調(diào)理及放大電路的主要器件是美國TI公司生產(chǎn)的OPA4336。其他主要器件如下:
SDRAM(HY57V64 1 620ETP)、FLASH(Am29LV8OOD)、CPLD(EPM570T100C5N)、TL16C550C 。
2 系統(tǒng)硬件設(shè)計
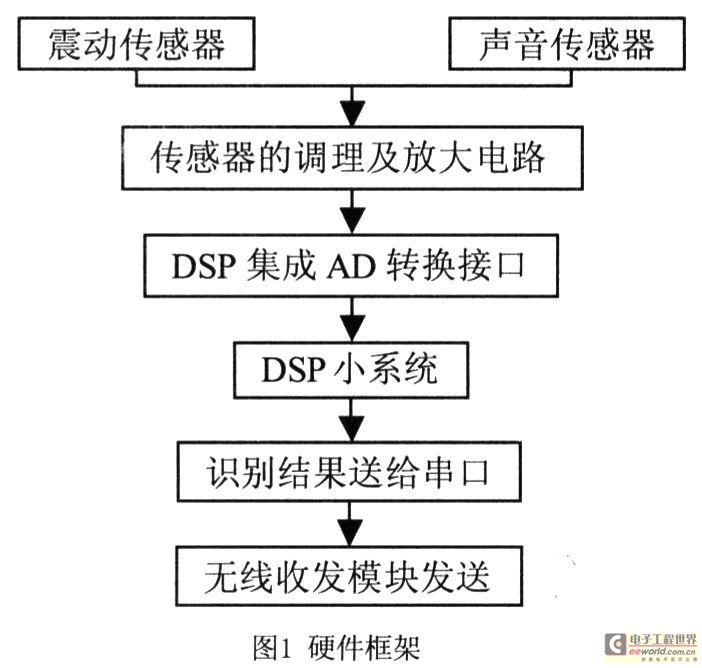
地面?zhèn)鞲衅飨到y(tǒng)主要由DSP小系統(tǒng)、傳感器的調(diào)理及放大電路、異步串口通信電路、無線收發(fā)模塊四部分組成。此系統(tǒng)通過震動和聲音傳感器采集地面運動目標(biāo)發(fā)出的信號,由傳感器調(diào)理及放大電路送入DSP進(jìn)行特征分析與識別,再將識別的結(jié)果通過異步串口傳送給無線收發(fā)模塊傳回指揮所。系統(tǒng)硬件框架如圖1圖1硬件框架
2.1 傳感器的選擇
2.1.1 震動傳感器。
選用小型化DX20動圈磁電式傳感器作為地震動信號傳感器。
2.1.2 聲音傳感器
選用733A01型聲音傳感器作為聲音動信號傳感器。
2.2 DSP小系統(tǒng)
DSP小系統(tǒng)的電源采用DC 5V和TLV1117-3.3及TLV1117-ADJ穩(wěn)壓芯片提供3.3V與1.6V兩種電壓,并用JTAG口硬件仿真并下載程序,SDRAM用于動態(tài)存儲采集到的數(shù)據(jù),F(xiàn)LASH保存DSP運行程序,待復(fù)位后重新載入DSP內(nèi)部RAM中運行,CPLD負(fù)責(zé)外圍器件的選擇控制。DSP通過16根數(shù)據(jù)總線和14根地址總線通過CPLD與SDRAM、FLASH、串口進(jìn)行通信。DSP怍為系統(tǒng)的核心,完成信號采集、過零數(shù)分析、短時能量分析、動態(tài)時間規(guī)整算法(DTW)等處理過程。
2.3 傳感器調(diào)理及放大電路
地震動傳感器應(yīng)能探測到200m以內(nèi)的運動車輛及20m以內(nèi)人員腳步的信號,聲音傳感器則能感受到600m以內(nèi)的車輛噪聲。如此遠(yuǎn)距離條件下,由傳感器檢測得到的目標(biāo)信號很微弱,通常只有mV級。如此小的信號必須先經(jīng)過前置放大和預(yù)處理后才能進(jìn)行采集處理。另外,由于小型化的要求,信號放大處理電路功耗應(yīng)盡量小。設(shè)計一種低功耗、低噪聲、高增益放大電路,是本系統(tǒng)的關(guān)鍵技術(shù)之一。考慮到地震動信號的頻率均為150 Hz以下,而車輛運動時的噪聲頻率在250Hz左右,所以在放大器的基礎(chǔ)上添加了低通濾波電路(如圖中C28、C38)以進(jìn)一步抑制環(huán)境噪聲。
OPA4336提供了4個獨立的放大器。系統(tǒng)放大電路由兩級組成:兩個對稱的同相放大器U6A和U6C構(gòu)成第一級,U6B為第二級差動放大器,U6D是聲音放大器。傳感器的調(diào)理及放大電路如圖2所示。

為了提高電路的抗共模干擾能力和抑制漂移的影響,在電路設(shè)計過程中嚴(yán)格保證各級反饋電阻的平衡匹配。嚴(yán)格保證R6=R15,R8=R13,R9=R14,R10=R12。整個放大器的閉環(huán)放大倍數(shù)為:

兩級放大電路,既滿足電路穩(wěn)定性要求,又提供一定倍數(shù)的增益。
每一級放大電路都附加了一個一階低通濾波器以消除較高頻環(huán)境噪聲。選用合適的阻值容值,就可把信號限制在某一頻率范圍內(nèi)。此外,由于采用單電源模式,供電電壓為3.3V,因此需提供一偏置電壓將參考電平拉高1.6V,以保證信號的完整性;為了電源去耦,應(yīng)在電源引腳和印制線路板上與運放參考端之間連接一個旁路電容。同時該電容在元器件布局時應(yīng)盡量靠近運放電源引腳。圖中IN+和IN-分別接震動傳感器的兩個引腳,VOICE接聲音傳感器,AIN0和AIN1分別接DSP的兩個A/D轉(zhuǎn)換接口。
3 系統(tǒng)軟件設(shè)計
本系統(tǒng)主要采用時域過零數(shù)分析、時域短時能量分析和頻譜相似性識別的方法將目標(biāo)區(qū)可能引起的激勵分為人員、輪式車輛、履帶車輛和沖擊性干擾四種屬性。下面分別介紹本系統(tǒng)的目標(biāo)識別方法。
系統(tǒng)上電復(fù)位以后將DSP和外設(shè)初始化,寫DSP的CLKMD寄存器進(jìn)入空閑模式,等待中斷喚醒,此時功耗極低(大概為0.05mW)。當(dāng)震動信號超門限,則模擬比較器觸發(fā)DSP外部中斷,進(jìn)入中斷服務(wù)程序。寫CLKMD寄存器進(jìn)入鎖相模式,DSP開始工作,關(guān)中斷啟動AIN0采集2s震動信號,然后啟動AIN1采集1s聲信號,并存儲于FLASH中。(由于目標(biāo)激勵的連續(xù)性,系統(tǒng)先采集地震動信號,再采集聲信號,忽略1秒鐘的時間差,不影響識別效果。)對采集到的地震動信號進(jìn)行過零數(shù)分析,如果大于300,則可以認(rèn)為是車輛信號,然后必需調(diào)用聲音信號分析,進(jìn)行時域加窗、歸一化、求平均值向量這些預(yù)處理以后再經(jīng)過聲信號頻譜相似性識別,可以將目標(biāo)分為輪式車輛和履帶車輛。如果過零數(shù)小于300,則可以判定信號是脈沖信號。必需調(diào)用聲音信號分析,如果短時能量大則可認(rèn)為是炮彈爆炸等大音量的沖擊式干擾。如果短時能量小則可認(rèn)為是人員在接近。本實驗數(shù)據(jù)源于美國分布式無線傳感網(wǎng)絡(luò)數(shù)據(jù)庫:http://WWW.ece.wise.edu/sensit。通過對人員、輪式車和履帶車輛在三種地面行駛的各10個測試樣本進(jìn)行識別,識別率達(dá)到了對人員目標(biāo)的區(qū)分率達(dá)到90%,對兩種車輛目標(biāo)的區(qū)分率達(dá)到80%。
3 結(jié)語
采用抗共模干擾和抑制漂移的兩級放大電路設(shè)計,提高了信號采集的精度。運用DSP實現(xiàn)地面?zhèn)鞲衅飨到y(tǒng)能夠較準(zhǔn)確地識別地面運動目標(biāo),實現(xiàn)了數(shù)據(jù)實時處理和識別,縮短了探測系統(tǒng)的反應(yīng)時間。
