
1 概述
在工程機(jī)械的控制系統(tǒng)中,計(jì)算機(jī)技術(shù)、網(wǎng)絡(luò)通訊技術(shù)的應(yīng)用日趨廣泛。CAN 總線由于其數(shù)據(jù)傳輸高可靠性和高實(shí)時(shí)性的特點(diǎn),已經(jīng)成為工業(yè)現(xiàn)場數(shù)據(jù)傳輸方式的事實(shí)標(biāo)準(zhǔn)之一,現(xiàn)已被廣泛應(yīng)用于汽車、工業(yè)控制、智能樓宇、煤礦設(shè)備等各個(gè)行業(yè)的數(shù)據(jù)通訊。CAN 總線采用短幀報(bào)文結(jié)構(gòu),實(shí)時(shí)性好,并具有完善的數(shù)據(jù)校驗(yàn)、錯(cuò)誤處理以及檢錯(cuò)機(jī)制,此外CAN 總線節(jié)點(diǎn)在嚴(yán)重錯(cuò)誤下會(huì)自動(dòng)脫離總線,對總線通訊沒有影響[1]。CAN 總線網(wǎng)絡(luò)中,數(shù)據(jù)收發(fā)、硬件檢錯(cuò)均由CAN 控制器硬件完成,大大增強(qiáng)了CAN 總線網(wǎng)絡(luò)的抗電磁干擾能力,因此非常適用于對實(shí)時(shí)性、安全性要求十分嚴(yán)格的機(jī)械控制網(wǎng)絡(luò)。
SNMP 作為TCP/IP 協(xié)議族的一個(gè)子協(xié)議,是IEITF 研究小組提出的網(wǎng)絡(luò)管理解決方案之一,它作為一種簡潔而流行的網(wǎng)絡(luò)管理協(xié)議在工業(yè)界獲得了廣泛的應(yīng)用。SNMP 網(wǎng)絡(luò)管理模型中的重要組成部分包括:網(wǎng)絡(luò)管理協(xié)議、管理端(Manager)、代理(Agent )和管理信息庫(MIB)。其管理的基本思想是,通過管理端與代理之間的相互合作,以分布方式執(zhí)行網(wǎng)絡(luò)管理活動(dòng)[2]。管理端負(fù)責(zé)管理網(wǎng)絡(luò)中各種資源和設(shè)備,采用輪詢(polling )或手動(dòng)方式向遠(yuǎn)程的代理發(fā)送Get(讀取)和Set(設(shè)置)請求命令,以獲取信息或?qū)嵤┛刂啤4眈v留在設(shè)備上,負(fù)責(zé)設(shè)備的實(shí)際管理和控制,響應(yīng)和執(zhí)行管理端的管理命令,并且返回應(yīng)答信息。MIB 存放被管對象資源的所有信息,管理端通過代理來讀取和設(shè)置MIB 文件中的變量值,以實(shí)現(xiàn)對被管理設(shè)備的監(jiān)控。每個(gè)網(wǎng)絡(luò)設(shè)備上的MIB 又由代理負(fù)責(zé)維護(hù)。SNMP 最大的優(yōu)點(diǎn)是協(xié)議簡潔,可擴(kuò)展性強(qiáng),只要將新的MIB 裝載在管理軟件上就可以實(shí)現(xiàn)對新的終端的控制與訪問。
起重力矩限制系統(tǒng)是起重機(jī)械運(yùn)行中重要的安全保障裝置,其核心在于對規(guī)定動(dòng)作執(zhí)行的精確度,這不僅有賴于傳感器和執(zhí)行器的精度,還有賴于數(shù)據(jù)采集信號(hào)和命令的執(zhí)行速度。比如起落桿的左右轉(zhuǎn)動(dòng)角度信號(hào),通過數(shù)據(jù)采集模塊將信號(hào)標(biāo)準(zhǔn)化,主控工控機(jī)接收到該信號(hào)后和預(yù)先設(shè)定的參數(shù)做比較,并根據(jù)偏差指揮左轉(zhuǎn)或右轉(zhuǎn)開關(guān)動(dòng)作,并最終到位。傳統(tǒng)的起重力矩控制系統(tǒng)采用基于RS485 的信號(hào)傳輸,其通訊波特率僅為57.6Kbps ,系統(tǒng)穩(wěn)定性差,電動(dòng)機(jī)和其他大功率設(shè)備常常影響系統(tǒng)的正常運(yùn)行。而采用CAN 總線傳輸信號(hào)則不僅提高系統(tǒng)的抗電磁干擾能力,而且可使通訊波特率大大提高。基于SNMP 協(xié)議的遠(yuǎn)程通信,傳輸距離不受限制,這相對于其他工業(yè)控制總線有不可比擬的優(yōu)勢。本文提出的方案結(jié)合應(yīng)用CAN 總線和SNMP 協(xié)議的優(yōu)點(diǎn),構(gòu)建遠(yuǎn)程起重力矩監(jiān)控系統(tǒng),現(xiàn)場數(shù)據(jù)傳輸速率可高達(dá)500Kbps ,并具有硬件自動(dòng)校驗(yàn)和錯(cuò)誤自動(dòng)重發(fā)功能。該方案可以保障可靠、實(shí)時(shí)的數(shù)據(jù)傳輸和命令執(zhí)行,保障起重機(jī)械的安全運(yùn)行。
2 系統(tǒng)硬件結(jié)構(gòu)與特點(diǎn)
在起重機(jī)工作現(xiàn)場,通過CAN 總線實(shí)現(xiàn)對各傳感器信號(hào)的采集以及對輸出裝置的控制,具有抗干擾能力強(qiáng)、可靠性高、實(shí)時(shí)響應(yīng)性好,線纜少易敷設(shè)、成本低等優(yōu)點(diǎn)。現(xiàn)場工控機(jī)與遠(yuǎn)程監(jiān)控計(jì)算機(jī)之間的通信采用Internet 作為媒介,使用基于SNMP 協(xié)議的遠(yuǎn)程傳輸,進(jìn)一步拓展了CAN 總線的優(yōu)勢。
現(xiàn)場起重機(jī)工作的角度、長度、壓力等信號(hào)由各類傳感器采集,輸入iCAN 數(shù)據(jù)采集模塊,經(jīng)過CAN 總線傳給現(xiàn)場工控機(jī),并存儲(chǔ)在駐留工控機(jī)內(nèi)的MIB 文件中,供運(yùn)行在遠(yuǎn)程監(jiān)控計(jì)算機(jī)中的管理端軟件查詢調(diào)用。同時(shí),各開關(guān)的狀態(tài)變量也存儲(chǔ)在該MIB 文件中,根據(jù)管理端發(fā)來的設(shè)置值變更成新值,再經(jīng)由現(xiàn)場CAN 總線網(wǎng)絡(luò)傳遞給輸出控制模塊以控制各開關(guān)的狀態(tài),達(dá)到起重力矩遠(yuǎn)程監(jiān)控的目的。系統(tǒng)結(jié)構(gòu)如圖1 所示。
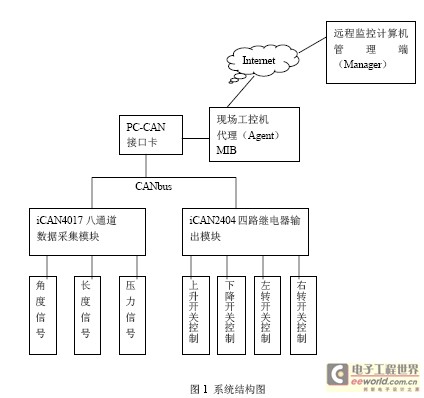
其中,iCAN-4017 AI 功能模塊具有8 路模擬量輸入通道,符合CAN2.0B 協(xié)議規(guī)范,用于采集傳感器的輸入信號(hào),將輸入信號(hào)經(jīng)多路開關(guān)、AD 轉(zhuǎn)換后經(jīng)光耦隔離模塊,通過CAN 總線通訊將輸入的模擬量信號(hào)傳送給現(xiàn)場工控機(jī)[3]。iCAN-2404 繼電器功能模塊有4 路具有自保持功能的繼電器輸出通道,它在工作時(shí),工控機(jī)通過CAN 總線將輸出的繼電器控制數(shù)據(jù)傳送給該模塊,模塊通過光電隔離后輸出驅(qū)動(dòng)繼電器,實(shí)現(xiàn)對上升、下降、左轉(zhuǎn)、右轉(zhuǎn)開關(guān)的控制。
3 系統(tǒng)軟件工作原理及實(shí)現(xiàn)
系統(tǒng)的軟件主要分為兩部分,其一是為了提取和設(shè)置CANbus 現(xiàn)場總線中的據(jù),其二是基于SNMP 協(xié)議實(shí)現(xiàn)數(shù)據(jù)的遠(yuǎn)程通信。
3.1 提取和設(shè)置現(xiàn)場總線中的數(shù)據(jù)
為了對傳感器數(shù)據(jù)進(jìn)行處理,實(shí)時(shí)獲取系統(tǒng)工作狀態(tài),并對各執(zhí)行器進(jìn)行相應(yīng)的控制,我們利用iCAN 模塊附帶的函數(shù)庫在VC++開發(fā)平臺(tái)下編寫了相應(yīng)的程序來通過各iCAN 模塊采集傳感器的信號(hào),控制各開關(guān)的狀態(tài)。iCAN 主站函數(shù)庫以動(dòng)態(tài)鏈接庫(DLL)的形式提供,內(nèi)部封裝了iCAN 協(xié)議,屏蔽訪問控制細(xì)節(jié),提供對現(xiàn)場總線iCAN 網(wǎng)絡(luò)中設(shè)備訪問的接口[3]。通過調(diào)用此函數(shù)庫,可以使PC-CAN 主站卡和iCAN 從站模塊進(jìn)行通訊,完成工控機(jī)與現(xiàn)場總線上各節(jié)點(diǎn)設(shè)備之間的信息交換。
3.2 基于SNMP 協(xié)議的通信實(shí)現(xiàn)
為了基于SNMP 協(xié)議在遠(yuǎn)程監(jiān)控計(jì)算機(jī)與現(xiàn)場工控機(jī)之間進(jìn)行通信,需要開發(fā)兩部分的程序,即管理端程序和代理程序。管理端程序運(yùn)行在遠(yuǎn)程監(jiān)控計(jì)算機(jī)中,代理程序駐留在與現(xiàn)場CAN 總線相連的工控機(jī)上,代理中還包括管理信息庫MIB,MIB 存儲(chǔ)被管理對象的信息,包括角度、壓力數(shù)據(jù),各開關(guān)的開閉狀態(tài)等。管理端以輪詢方式向遠(yuǎn)程的代理發(fā)送Get(讀取)和Set(設(shè)置)請求命令,以獲取角度、長度和壓力信息或?qū)嵤╅_關(guān)控制。代理將根據(jù)請求的內(nèi)容從本地 MIB 中提取所需信息,并以響應(yīng)報(bào)文方式將結(jié)果回送給管理端。具體地,它一方面不斷地檢查本地的狀態(tài),更新MIB 庫中的變量值;另一方面,循環(huán)偵聽管理端的請求報(bào)文,并作出相應(yīng)的響應(yīng),讀取或修改 MIB 中的變量值,將結(jié)果返回給管理端。通信交互過程如圖2 所示[4] 。
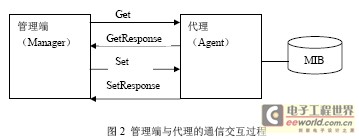
圖2 管理端與代理的通信交互過程
(1)Get 操作
管理端向代理發(fā)送Get 請求,要求返回壓力、角度等數(shù)據(jù)。代理接受請求后,對PDU 進(jìn)行解析處理,并調(diào)用相應(yīng)的子功能模塊,從MIB 文件中讀出“壓力”、“角度”、“長度”等變量的值,然后代理調(diào)用編碼模塊,將這些數(shù)據(jù)打包成相應(yīng)的PDU 發(fā)送給管理端作為對Get 請求的響應(yīng)。管理端接收到相應(yīng)數(shù)據(jù)后,將它們與預(yù)先設(shè)定的參考值作比較,根據(jù)實(shí)際值與設(shè)定值之間的偏差,判斷起重力矩是否超過限制,并據(jù)此發(fā)出相應(yīng)的開關(guān)控制命令。
(2)Set 操作
Set 請求的原理與Get 類似,不過是將某一新的值寫給相應(yīng)的變量,而不是讀,從而實(shí)現(xiàn)對被管理設(shè)備的控制。在該系統(tǒng)中,管理端向代理發(fā)送Set 請求,以設(shè)置各開關(guān)的狀態(tài)變量。代理接受請求后,向MIB 文件中寫入各“開關(guān)”變量的新值,并通過現(xiàn)場的CAN 總線傳遞給輸出控制模塊來控制上升、下降、左轉(zhuǎn)、右轉(zhuǎn)開關(guān)的動(dòng)作。
3.3 MIB 的編寫
MIB 是有關(guān)被管理目標(biāo)對象的數(shù)據(jù)庫,其數(shù)據(jù)結(jié)構(gòu)呈樹形。本系統(tǒng)中的MIB 文件存儲(chǔ)了現(xiàn)場傳感器采集的各種信號(hào)以及開關(guān)的狀態(tài),通過讀取和設(shè)置這些MIB 對象的值,管理端完成監(jiān)測和控制。MIB 文件編寫中最關(guān)鍵的一點(diǎn)是確定要定義的變量。在該系統(tǒng)的MIB 設(shè)計(jì)中定義的變量如表1 所示。
表1 遠(yuǎn)程起重力矩監(jiān)控系統(tǒng)MIB 變量表
|
MIB 變量名
|
含義
|
類型
|
|
DegreeValue
|
角度的實(shí)際值
|
Integer
|
|
LengthValue
|
長度的實(shí)際值
|
Integer
|
|
PressureValue
|
壓力的實(shí)際值
|
Integer
|
|
UpSwitch
|
上升開關(guān)狀態(tài)
|
Integer
|
|
DownSwitch
|
下降開關(guān)狀態(tài)
|
Integer
|
|
LeftSwitch
|
左轉(zhuǎn)開關(guān)狀態(tài)
|
Integer
|
|
RightSwitch
|
右轉(zhuǎn)開關(guān)狀態(tài)
|
Integer
|
3.4 代理與管理端程序的開發(fā)
采用AdventNet Agent Toolkit C Edition 工具包來開發(fā)代理程序,該工具包提供了一個(gè)廣泛而完整的開發(fā)環(huán)境,并帶有代理信息定義編輯器、編譯器等一系列代理開發(fā)工具及測試工具,降低了代理開發(fā)的復(fù)雜性。所開發(fā)的代理僅占用極小的空間,卻具有較高的性能,而且代理的擴(kuò)展幾乎不會(huì)影響到應(yīng)用和設(shè)備的性能。在編寫好MIB 文件后,依據(jù)Agent Toolkit C Edition 工具的開發(fā)流程編寫代理程序,其主要功能是對MIB 文件進(jìn)行管理,并實(shí)現(xiàn)對網(wǎng)絡(luò)端口的偵聽,SNMP 數(shù)據(jù)報(bào)的解碼及編碼,對管理端的請求進(jìn)行處理,以及對硬件的管理。
在VC++.NET 開發(fā)平臺(tái)下利用NET-SNMP 開發(fā)包來編寫管理端程序。NET-SNMP 開發(fā)包是目前最為流行的基于C++的SNMP 協(xié)議開發(fā)包之一,開發(fā)包中的SNMP 協(xié)議模塊為用戶使用SNMP 協(xié)議來構(gòu)建網(wǎng)絡(luò)管理應(yīng)用層軟件提供了良好的協(xié)議通訊的基礎(chǔ),它提供了一系列的API 函數(shù)可供開發(fā)者使用。本系統(tǒng)的管理端程序運(yùn)行在遠(yuǎn)程監(jiān)控計(jì)算機(jī)上,與工作現(xiàn)場工控機(jī)上駐留的代理之間進(jìn)行遠(yuǎn)程數(shù)據(jù)通信,主要完成Get 和Set 操作兩項(xiàng)任務(wù)。
5 結(jié)論
CAN 總線因其自身的諸多優(yōu)點(diǎn)適合于對實(shí)時(shí)性、可靠性、安全性要求十分嚴(yán)格的機(jī)械控制網(wǎng)絡(luò)。SNMP 協(xié)議簡潔,可擴(kuò)展性強(qiáng),基于SNMP 協(xié)議的網(wǎng)絡(luò)傳輸以Internet 作為媒介,傳輸距離不受限制,可進(jìn)一步拓展CAN 總線的優(yōu)勢。本文的創(chuàng)新點(diǎn)在于,結(jié)合這兩種技術(shù)的優(yōu)點(diǎn),實(shí)現(xiàn)了基于CAN 總線和SNMP 協(xié)議的起重力矩遠(yuǎn)程監(jiān)控系統(tǒng),該方案可以保障可靠、實(shí)時(shí)的遠(yuǎn)程數(shù)據(jù)傳輸和命令執(zhí)行,確保起重機(jī)械的安全運(yùn)行。項(xiàng)目經(jīng)濟(jì)效益達(dá)20 萬元。