
這篇工業(yè)電機(jī)控制概述著重介紹了直流電機(jī)、無刷直流電機(jī)、交流感應(yīng)電機(jī)的差異及其子系統(tǒng),深入分析了電流監(jiān)測(cè)與測(cè)量、溫度檢測(cè)子系統(tǒng)、電機(jī)速度、位置、位移檢測(cè)系統(tǒng)、多通道電流和電壓監(jiān)測(cè)與控制以及帶有編碼器數(shù)據(jù)接口的高精度電機(jī)控制子系統(tǒng)。
電機(jī)消耗的能量幾乎占全球電力的50%。隨著能源成本的持續(xù)上漲,業(yè)內(nèi)開始采用微處理器調(diào)速驅(qū)動(dòng)器替代效率低下的固定速率電機(jī)和驅(qū)動(dòng)器,這種新型電機(jī)控制技術(shù)與傳統(tǒng)驅(qū)動(dòng)器相比,能夠使能耗平均降低30%以上。雖然調(diào)速電機(jī)提高了系統(tǒng)本身的成本,但是,考慮到電機(jī)能夠節(jié)省的能量以及所增加的功能,只需短短幾年即可挽回最初的投資成本。

通用電機(jī)設(shè)計(jì)
直流電機(jī)、無刷直流和交流感應(yīng)電機(jī)是當(dāng)今工業(yè)應(yīng)用設(shè)計(jì)中最常見的電機(jī)。盡管每種類型的電機(jī)都有獨(dú)特的性能,但基本工作原理類似。當(dāng)一個(gè)導(dǎo)體通電時(shí),例如線圈繞組,如果導(dǎo)體處于一個(gè)與其垂直的外部磁場(chǎng)內(nèi),導(dǎo)體將會(huì)受到一個(gè)與自身和外部磁場(chǎng)垂直的力。
直流電機(jī):低成本和高精度驅(qū)動(dòng)性能
直流電機(jī)是最先投入使用的電機(jī)類型,目前仍然以低開發(fā)成本和卓越的驅(qū)動(dòng)性能得到普遍應(yīng)用。在最簡(jiǎn)單的直流電機(jī)中,定子(即電機(jī)固定部件)為永久磁鐵,轉(zhuǎn)子(即電機(jī)的轉(zhuǎn)動(dòng)部件)上纏繞了電樞繞組,電樞繞組連接到機(jī)械換向開關(guān),該開關(guān)控制繞組電流的導(dǎo)通和關(guān)閉。磁鐵建立的磁通量與電樞電流相互作用,產(chǎn)生電磁扭矩,從而使電機(jī)做功。電機(jī)速度通過調(diào)整電樞繞組的直流電壓進(jìn)行控制。
根據(jù)具體應(yīng)用的不同,可以采用全橋、半橋或一個(gè)簡(jiǎn)單的降壓轉(zhuǎn)換器驅(qū)動(dòng)電樞繞組。這些轉(zhuǎn)換器的開關(guān)通過脈寬調(diào)制(PWM)獲得相應(yīng)的電壓。Maxim的高邊或橋式驅(qū)動(dòng)器IC,例如:MAX15024/MAX15025,可以用來驅(qū)動(dòng)全橋或半橋電路的FET。
直流電機(jī)還廣泛用于對(duì)速度、精度要求很高的伺服系統(tǒng)。為了滿足速度和精度的要求,基于微處理器的閉環(huán)控制和轉(zhuǎn)子位置非常關(guān)鍵。Maxim的MAX9641霍爾傳感器" title="傳感器">傳感器能夠用于提供轉(zhuǎn)子的位置信息。
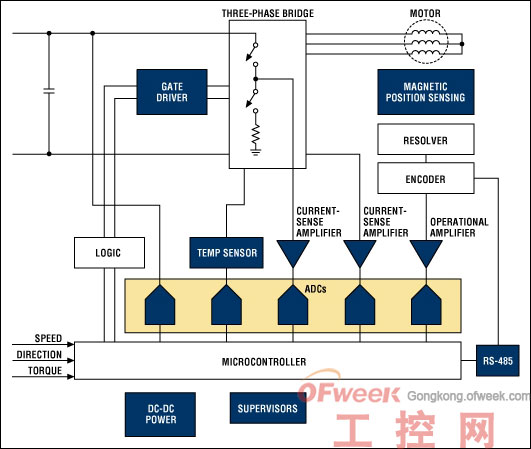
圖2 工業(yè)電機(jī)控制系統(tǒng)" title="電機(jī)控制系統(tǒng)">電機(jī)控制系統(tǒng)典型電路框圖。
交流感應(yīng)電機(jī):簡(jiǎn)單、堅(jiān)固耐用
交流感應(yīng)電機(jī)以簡(jiǎn)單、堅(jiān)固耐用而著稱,被廣泛用于工業(yè)領(lǐng)域。最簡(jiǎn)單的交流電機(jī)就是一個(gè)變壓器,原級(jí)電壓連接到交流電壓源,次級(jí)短路承載感應(yīng)電流。“感應(yīng)”電機(jī)的名稱源于“感應(yīng)次級(jí)電流”。定子載有一個(gè)三相繞組,轉(zhuǎn)子設(shè)計(jì)簡(jiǎn)單,通常被稱為“鼠籠”,其中,兩端的銅或鋁棒通過鑄鋁環(huán)短路。由于沒有轉(zhuǎn)子繞組和碳刷,這種電機(jī)的設(shè)計(jì)非常可靠。

圖3 感應(yīng)電機(jī)的轉(zhuǎn)子和定子
工作在60Hz電壓時(shí),感應(yīng)電機(jī)恒速運(yùn)轉(zhuǎn)。然而,當(dāng)采用電源電路和基于微處理器的系統(tǒng)時(shí),可以控制電機(jī)速度變化。變速驅(qū)動(dòng)器由逆變器、信號(hào)調(diào)理器和基于微處理器的控制器組成。逆變器采用三個(gè)半橋,頂部和底部切換以互補(bǔ)方式控制。Maxim提供多種半橋驅(qū)動(dòng)器,如MAX15024/MAX15025,可獨(dú)立控制頂部和底部FET。
精確測(cè)量三相電機(jī)電流、轉(zhuǎn)子位置及轉(zhuǎn)速是對(duì)感應(yīng)電機(jī)進(jìn)行高效閉環(huán)控制的必要條件。Maxim提供多款高邊和低邊電流放大器、霍爾傳感器以及同步采樣模/數(shù)轉(zhuǎn)換器(ADC),能夠在惡劣環(huán)境下精確測(cè)量這些參數(shù)。
微處理器利用電流和位置數(shù)據(jù)產(chǎn)生三相橋路的邏輯信號(hào)。一種常見的閉環(huán)控制技術(shù)稱為矢量控制,它消除了磁場(chǎng)電流矢量和定子磁通量之間的耦合,從而能夠獨(dú)立控制,提供更快的瞬態(tài)響應(yīng)。
無刷直流電機(jī):高可靠性和高輸出功率
無刷直流(BLDC)電機(jī)既沒有換向器也沒有碳刷,相對(duì)于直流電機(jī)而言需要更少的維護(hù)。相對(duì)于感應(yīng)電機(jī)或直流電機(jī)而言,同等規(guī)格的無刷直流電機(jī)能提供更大的輸出功率。
BLDC電機(jī)的定子與感應(yīng)電機(jī)的定子非常相似。但是,BLDC電機(jī)的轉(zhuǎn)子可以采用不同形式,當(dāng)然,都屬于永久磁鐵。氣隙磁通量由磁鐵固定,不受轉(zhuǎn)子電流的影響。BLDC電機(jī)還需要一定形式的轉(zhuǎn)子位置檢測(cè)。通常利用定子中嵌入的霍爾器件檢測(cè)轉(zhuǎn)子位置。當(dāng)轉(zhuǎn)子的磁極經(jīng)過霍爾傳感器附近時(shí),會(huì)有一個(gè)信號(hào)指示通過的是北極還是南極。Maxim提供多款霍爾傳感器,如MAX9641,這些器件集成了兩個(gè)霍爾傳感器和數(shù)字邏輯電路,可提供磁場(chǎng)位置、方向輸出,從而簡(jiǎn)化設(shè)計(jì)并降低系統(tǒng)成本。
傳感器、信號(hào)轉(zhuǎn)換" title="信號(hào)轉(zhuǎn)換">信號(hào)轉(zhuǎn)換和數(shù)據(jù)接口的重要性
在電機(jī)控制環(huán)路中,有幾種類型的傳感器提供反饋信息。這些傳感器還用于檢測(cè)可能損壞系統(tǒng)的故障狀態(tài),從而提高系統(tǒng)可靠性。以下章節(jié)詳細(xì)介紹了傳感器在電機(jī)控制中的作用,特別是電流檢測(cè)放大器、霍爾傳感器和可變磁阻(VR)傳感器。其它內(nèi)容包括:利用高速模/數(shù)轉(zhuǎn)換器(ADC)監(jiān)測(cè)、控制多通道電流和電壓,高精度電機(jī)控制所需的編碼器數(shù)據(jù)接口等。
檢測(cè)并監(jiān)控電流優(yōu)化電機(jī)控制
電流監(jiān)測(cè)
電流是用于檢測(cè)、監(jiān)測(cè)并反饋給電機(jī)控制環(huán)路的常見信號(hào)。利用電流檢測(cè)放大器可以輕松地精確監(jiān)測(cè)系統(tǒng)流入、流出的電流。采用電流檢測(cè)放大器可以省去傳感器,因?yàn)樾枰獪y(cè)量的是電信號(hào)本身。電流檢測(cè)放大器能夠檢測(cè)短路和瞬態(tài)狀況,并監(jiān)測(cè)電源和電池反接故障。
電流測(cè)量
電流測(cè)量有很多渠道,但截至目前為止,最常見的方案是采用檢流電阻進(jìn)行測(cè)量。這種方法的基本原理是:利用基于運(yùn)放的差分放大器對(duì)檢流電阻兩端的電壓進(jìn)行放大,然后測(cè)量放大后的電壓信號(hào)。傳統(tǒng)設(shè)計(jì)中通常采用分立器件。但分立方案存在一些缺點(diǎn),例如:需要匹配電阻、具有較差的溫漂特性,并占用較大面積。幸運(yùn)的是,這些缺點(diǎn)可以通過在設(shè)計(jì)中使用集成電流檢測(cè)放大器得以解決。放大器不僅測(cè)量電流,還可以檢測(cè)電流方向,具有較寬的共模范圍,能夠提供高精度測(cè)量。
電流測(cè)量可以采用低邊檢測(cè)(檢測(cè)電阻與接地通路串聯(lián)),也可以采用高邊檢測(cè)(檢測(cè)電阻與火線串聯(lián))。低邊檢測(cè)中,電路的輸入共模電壓較低,輸出電壓以地為參考,但低邊電阻在接地通路增加了所不希望的外部電阻。高邊檢測(cè)中,負(fù)載接地,但高邊電阻必須承受相當(dāng)大的共模信號(hào)。高邊檢測(cè)能夠?qū)收蠣顟B(tài)進(jìn)行監(jiān)測(cè),例如,電機(jī)外殼或繞組對(duì)地短路。

圖4
高邊電流檢測(cè)放大器,如MAX4080/MAX4081,將檢流電阻放置在電源正端和被監(jiān)測(cè)電路的電源輸入之間。這種設(shè)計(jì)沒有在地通道引入外接電阻,大大簡(jiǎn)化了布局,通常也有助于改善電路的總體性能。Maxim可提供單向和雙向電流檢測(cè)IC (內(nèi)置或外置檢流電阻),如MAX9918/MAX9919/MAX9920。器件的多樣性為設(shè)計(jì)提供極大靈活性,并簡(jiǎn)化了各種ADC及其應(yīng)用的器件選型。
電機(jī)速度、位置及位移檢測(cè)
霍爾傳感器被廣泛用于電機(jī)速度、位置和方向的檢測(cè)。這些傳感器集成了邏輯電路,能夠?qū)?shù)據(jù)傳送到系統(tǒng)進(jìn)行實(shí)時(shí)反饋。傳感器還可檢測(cè)并報(bào)告任何形式的電機(jī)中斷故障,從而采取相應(yīng)措施。檢測(cè)運(yùn)動(dòng)方向通常需要兩個(gè)霍爾傳感器。
若系統(tǒng)使用的霍爾器件數(shù)量與電機(jī)相數(shù)相同,并且霍爾器件的機(jī)械結(jié)構(gòu)與電機(jī)每一相的電氣特性相關(guān)聯(lián),換向操作可以同步到霍爾傳感器輸出邊沿。Maxim的MAX9641集成了兩路霍爾傳感器和傳感器信號(hào)調(diào)理電路,提供位置和方向輸出。
霍爾傳感器還能夠配合專用的霍爾傳感器接口產(chǎn)品使用,如MAX9621。接口器件提供多種功能:電源瞬態(tài)保護(hù)、對(duì)霍爾傳感器的吸收電流進(jìn)行檢測(cè)并濾波,以及故障診斷和保護(hù)。
與機(jī)械式光斷路器系統(tǒng)相比,霍爾傳感器有效提高了系統(tǒng)的可靠性和可重復(fù)性,而前者在灰塵和潮濕環(huán)境下無法保證可靠工作。由于霍爾傳感器檢測(cè)的是磁鐵或電流產(chǎn)生的磁場(chǎng),所以能夠在這樣的惡劣環(huán)境下連續(xù)工作。
有些應(yīng)用中,振動(dòng)、灰塵和高溫會(huì)造成有源傳感器工作異常。這種情況下,可以利用無源器件檢測(cè)電機(jī)工作并通過一個(gè)接口IC把數(shù)據(jù)反饋給系統(tǒng)。也可以在極端工作條件下選擇使用可變磁阻(VR)傳感器。
VR傳感器,如MAX9924—MAX9927通過一個(gè)線圈檢測(cè)電機(jī)的速度和轉(zhuǎn)動(dòng)。當(dāng)電機(jī)上安裝的齒輪進(jìn)入磁場(chǎng)時(shí),磁場(chǎng)的磁通量將會(huì)發(fā)生變化,從而導(dǎo)致線圈發(fā)生變化。當(dāng)齒輪靠近傳感器時(shí),磁通量達(dá)到最大值。當(dāng)齒輪離開時(shí),磁通量開始下降。旋轉(zhuǎn)齒輪會(huì)產(chǎn)生隨時(shí)間變化的磁通量,在線圈中感應(yīng)產(chǎn)生成比例的電壓。隨后,電子電路對(duì)該信號(hào)進(jìn)行處理,獲得一個(gè)更容易計(jì)數(shù)和定時(shí)的數(shù)字波形。集成VR傳感器接口方案相對(duì)于其它方案具有很多優(yōu)勢(shì),其中包括:提高抗干擾能力、提供準(zhǔn)確的相位信息。
圖5
多通道電流、電壓的監(jiān)測(cè)與控制
監(jiān)測(cè)、控制電機(jī)時(shí),需要測(cè)量多個(gè)電流和電壓信號(hào),并需要保持通道間相位信息的完整性。有兩種ADC架構(gòu)供設(shè)計(jì)人員選擇:使用多個(gè)單通道ADC,這種設(shè)計(jì)很難實(shí)現(xiàn)同步轉(zhuǎn)換時(shí)序;或者使用同步采樣ADC。同步采樣架構(gòu)可以是單芯片封裝多路ADC,所有通道采用同一轉(zhuǎn)換觸發(fā)器;也可以在模擬輸入端使用多路采樣/保持放大器(也稱為跟蹤/保持放大器)。使用多路采樣/保持放大器時(shí),多路模擬輸入和單通道ADC之間仍需使用多路復(fù)用器。同步采樣設(shè)計(jì)無需復(fù)雜的數(shù)字信號(hào)處理算法。
電機(jī)控制應(yīng)用大多采用100ksps或更高的采樣速率。ADC以這樣的速率連續(xù)監(jiān)測(cè)電機(jī)的工作狀況,提供任何故障或潛在險(xiǎn)情的報(bào)警指示。一旦發(fā)現(xiàn)故障征兆,系統(tǒng)即可進(jìn)行修復(fù)或在必要時(shí)關(guān)斷系統(tǒng)。如果ADC的采樣率不夠快,就不能盡早發(fā)現(xiàn)故障狀態(tài)并加以解決。
不同的電機(jī)控制應(yīng)用對(duì)于動(dòng)態(tài)測(cè)量范圍的要求不同。有些情況下,12位分辨率即可滿足系統(tǒng)要求。但對(duì)于更精密的電機(jī)控制應(yīng)用,16位分辨率則是更為常見的標(biāo)準(zhǔn)。利用高性能16位ADC,如MAX11044或MAX11049,系統(tǒng)可獲得高于90dB的動(dòng)態(tài)范圍。
Maxim提供適合各種電機(jī)控制的同步采樣ADC。包括帶有串口或并口的12/14/16位分辨率等不同類型的器件。

圖6
帶有編碼器數(shù)據(jù)接口的高精度電機(jī)控制
電機(jī)控制精度取決于系統(tǒng)需求。有些應(yīng)用對(duì)于精度的要求非常高,如工業(yè)機(jī)器人技術(shù)或灌裝生產(chǎn)線。例如,焊接機(jī)器人需要高速、高精度工作。同樣,灌裝生產(chǎn)線的電機(jī)必須精確控制,使瓶子能夠停留在正確的位置進(jìn)行灌裝、上蓋、貼標(biāo)簽。為了高精度地控制電機(jī),必須確定轉(zhuǎn)子的速度、方向和位置。這些參數(shù)可以通過模擬傳感器進(jìn)行監(jiān)測(cè),如決策器、同步器、RVDT或旋轉(zhuǎn)電位計(jì)。采用類似于光編碼器和霍爾傳感器的編碼器可以獲得較高精度。編碼器為控制器提供增量和/或絕對(duì)的轉(zhuǎn)軸角度信息。
電機(jī)控制器計(jì)算轉(zhuǎn)子的當(dāng)前速度和角度,通常由數(shù)字信號(hào)處理器(DSP)按照一定算法實(shí)現(xiàn)。它通過調(diào)整激勵(lì)獲得高效、最佳響應(yīng)。這種反饋控制環(huán)路需要傳感器安全、可靠的信息支持,這種信息通常需要通過遠(yuǎn)距離電纜
從編碼器傳輸?shù)娇刂破鳌?/p>
增量信息通常以正交信號(hào)形式傳輸至控制器,即兩個(gè)信號(hào)相位差為90°。這些信號(hào)可以是模擬形式(sine + cosine),也可以是二進(jìn)制形式。而絕對(duì)位置信息僅以串行二進(jìn)制數(shù)據(jù)流形式通過RS-482或RS-422總線傳輸。
由于工作環(huán)境惡劣,需要保證數(shù)據(jù)通道高度安全、可靠。差分信號(hào)成為高EMI環(huán)境的理想選擇。由于器件靠近電機(jī)工作,因此,還需要支持高溫環(huán)境。
Maxim提供全面的RS-485/RS-422和PROFIBUS接口器件,專為電機(jī)控制應(yīng)用而設(shè)計(jì)。MAX14840E高速RS-485收發(fā)器等接口器件具備高度信號(hào)完整性和可靠性,滿足嚴(yán)格的安全控制需求和大型投資設(shè)備的開發(fā)周期需求。

圖7