
引 言
美國微芯公司推出的dsPIC33FJ256MC710高性能16位數(shù)字信號控制器,采用了改進(jìn)型的哈佛架構(gòu)、C編譯器優(yōu)化的指令集、流水線取指令方式,具有實用、低價、指令集小、功耗低、速度高、體積小、功能強、抗干擾能力強等特點。dsPIC33FJ256MC710高性能16位數(shù)字信號控制器內(nèi)含有 12位的A/D轉(zhuǎn)換器(500 ksps)、直接存儲器訪問(DMA)、比較輸出、捕捉輸入、I2C接口、SPI接口、CAN接口、USART接口、Flash程序存儲器自讀寫等強大的控制功能,內(nèi)核又具有強大的數(shù)字信號處理能力,具有廣闊的應(yīng)用前景,主要應(yīng)用于電機控制等領(lǐng)域。
我們在芯片的實際應(yīng)用中遇到了一些預(yù)想不到的問題,有的是由于硬件設(shè)計造成,有的是由于外部干擾造成,還有的是軟件初始化造成的。這些問題的解決方法在微芯公司的應(yīng)用文檔中未提供,我們花了較多的時間進(jìn)行分析、測試,最后解決了問題。本文將這些解決方法介紹給大家,以避免大家在這個問題上花費太多的時間或因一些無法解決的問題而造成損失。
1 正交編碼器接口模塊的問題
dsPIC33FJ256MC710的正交編碼器接口模塊(以下簡稱QEI模塊),在調(diào)試(Debug)模式下,能夠正常工作,可以得到光電編碼器的轉(zhuǎn)動信號,但是在程序下載(Pro-gram)后模塊不工作,不能得到光電編碼器的轉(zhuǎn)動信號。這個問題有些隱蔽,不易發(fā)現(xiàn),在我們過去使用微芯公司芯片的過程中還從未遇到過。
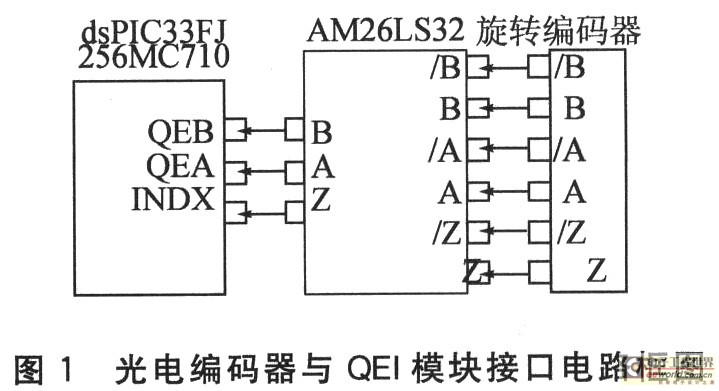
本文選用的光電編碼器為1024線,差分信號輸出。這種輸出方式在工業(yè)現(xiàn)場使用具備較高的抗干擾能力,可以連接的導(dǎo)線較長。由于光電編碼器的輸出為差分信號,而芯片接口要求為TTL電平信號,因此增加一片AM26LS32完成電平轉(zhuǎn)換,把差分信號轉(zhuǎn)換為TTL電平信號。光電編碼器輸出的A和/A、B和/B、z和/Z三組差分信號接入AM26LS32芯片,轉(zhuǎn)化為A、B、Z三路TTL電平信號與dsPIC33FJ256MC710的正交編碼器接口模塊 (QEI)連接。A、B為正交編碼信號,z為光電編碼器零位置信號。
dsPIC33FJ系列芯片,具有智能化的QEI模塊。它由QEA、QEB和INDX三個輸入通道組成。QEA和QEB這兩個通道具有智能的正交解碼功能。把光電編碼器輸出的A、B兩相正交編碼信號接入這兩個通道,芯片通過解碼算法,自動判斷出光電編碼器的旋轉(zhuǎn)方向和旋轉(zhuǎn)相對位置。INDX通道稱為索引脈沖。該通道通過接入Z信號,根據(jù)絕對零位置和相對位置,就可以確定光電編碼器旋轉(zhuǎn)的絕對位置。硬件接口原理框圖如圖1所示。
按照微芯公司的應(yīng)用筆記,QEI初始化程序如下:

在使用調(diào)試(Debug)模式運行程序時,用示波器可觀察到芯片53號引腳RF8上電平在每次編碼器位置過零時產(chǎn)生了翻轉(zhuǎn)。QEI模塊工作正常。而使用下載(Pro-gram)模式下載程序后,用示波器察到芯片53號引腳RF8上電平在每次編碼器位置過零時不發(fā)生變化,QEI模塊工作不正常。
修改初始化程序,初始化復(fù)用引腳時增加對模數(shù)轉(zhuǎn)化模塊AD2PCFGL的配置,就解決了這個問題。程序修改如下:
修改后的程序在下載(Program)模式的情況下,用示波器可以觀察到芯片53號引腳RF8上電平在每次編碼器位置過零時產(chǎn)生翻轉(zhuǎn),QEI模塊正常工作。
實際應(yīng)用QEI模塊時,直接讀取POSCNT寄存器的值,就可知道所測量旋轉(zhuǎn)軸的絕對位置。本文選用1024線的光電編碼器,通過配置寄存器選擇X4模式,POSCNT寄存器的計數(shù)范圍為0~4 096。根據(jù)索引脈沖中斷和POSCNT寄存器的值,便可精確地知道旋轉(zhuǎn)軸的旋轉(zhuǎn)方向、旋轉(zhuǎn)速度、當(dāng)前旋轉(zhuǎn)軸位置等,精度可以達(dá)到1/4 096。
2 RD15作為I/O輸出的問題
通用I/O端口是最基本最常用的接口,單片機、數(shù)字信號處理器通過它實現(xiàn)最基本的高低電平邏輯控制。應(yīng)用時,dsPIC33FJ256MC710的第48號引腳作為I/O輸出時,對應(yīng)為RD15。RD15作為開關(guān)量輸出時,軟件設(shè)置為高電平,但引腳上不能建立高電平。通過大量的試驗檢測,發(fā)現(xiàn)芯片第48號引腳RD15作為I/O端口時不能正常工作。為了更清楚地說明該問題,引入47、53、54號引腳RD14、RF7、RF8與RD15作對比。相關(guān)驗證程序如下:

運行上述程序,用示波器觀察dsPIC33FJ256MC710芯片的RD14、RF7、RF8對應(yīng)的第47、53、54引腳上的電平均為規(guī)律的方波信號,而48引腳RD15上高電平不能正常建立,只有極小的尖峰脈沖,波形如圖2所示。
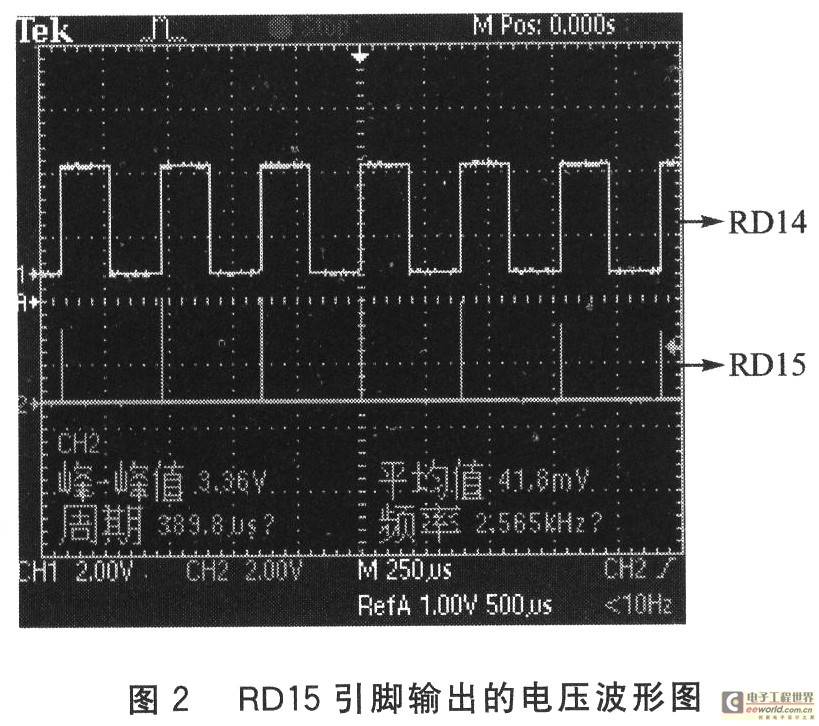
圖2中上部波形為用作對比的RD14對應(yīng)的第47號引腳上的電平信號,下部波形為RD15對應(yīng)的第48號引腳上的電平信號。下部波形與上部波形的控制方式是一樣的(見上述程序),但是不能得到高電平信號。
修改程序的方法是在改變寄存器PORTDbits.RD15之后添加一個空操作指令asm("nop")。修改后程序如下:
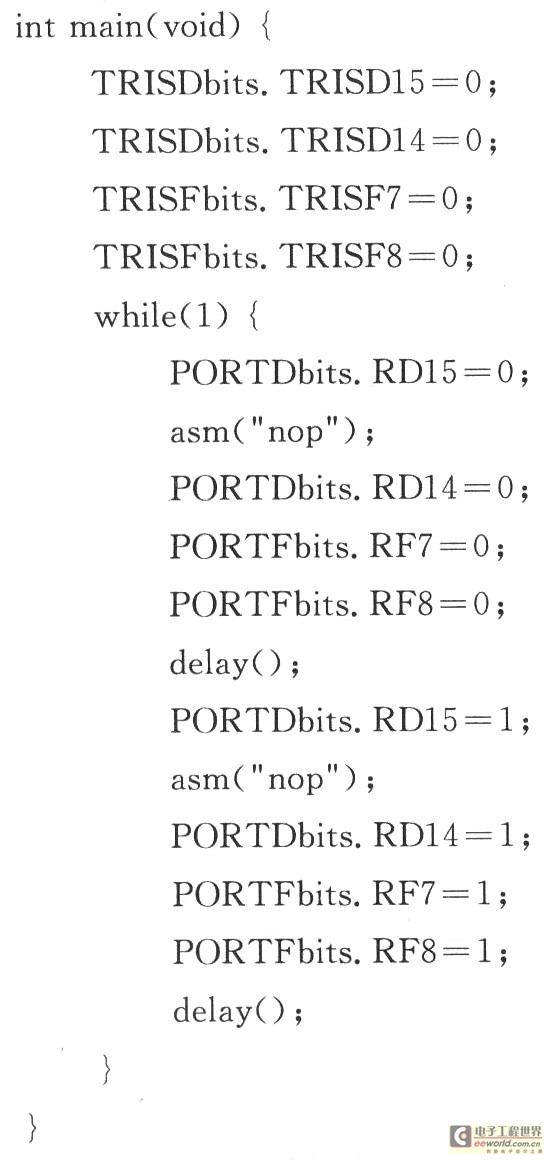
運行修改后的程序,RD15對應(yīng)的第48號引腳上也出現(xiàn)規(guī)律的方波信號,解決了上述問題。這個問題在應(yīng)用中也是不易發(fā)現(xiàn)的,查了微芯公司的應(yīng)用筆記也無相關(guān)說明,因此詳細(xì)寫出來以饋讀者。
結(jié) 語
本文介紹了Microchip公司的高性能16位數(shù)字信號控制器dsPIC33FJ系列芯片的內(nèi)部資源,在應(yīng)用dsPIC33FJ256MC710芯片時遇到的兩個疑難問題。這些問題可能是由于硬件設(shè)計造成,也可能是外部干擾或軟件初始化造成的,往往是預(yù)想不到的問題。本文利用相關(guān)程序和波形具體闡述了這兩個問題的現(xiàn)象和解決方法,并附上了相應(yīng)的程序,希望對讀者能有所幫助。