
摘 要: 介紹了基于Neuron芯片的LonWorks 網(wǎng)絡(luò)PID控制節(jié)點(diǎn)的設(shè)計(jì)及開(kāi)發(fā)。具體包括節(jié)點(diǎn)的硬件電路及軟件設(shè)計(jì)方案。本設(shè)計(jì)方案經(jīng)過(guò)實(shí)驗(yàn)驗(yàn)證是切實(shí)可行的。
關(guān)鍵詞: 現(xiàn)場(chǎng)總線(xiàn)控制系統(tǒng)(FCS) LonWorks技術(shù) PID Neuron芯片
現(xiàn)代工業(yè)過(guò)程控制領(lǐng)域?qū)y(cè)控系統(tǒng)的速度、精度、成本等方面提出了更高的要求,全數(shù)字、雙向、多節(jié)點(diǎn)的現(xiàn)場(chǎng)總線(xiàn)應(yīng)運(yùn)而生。現(xiàn)場(chǎng)總線(xiàn)是一種串行的數(shù)字通信鏈路,它溝通了生產(chǎn)領(lǐng)域的現(xiàn)場(chǎng)設(shè)備之間以及與更高層次控制過(guò)程設(shè)備之間的聯(lián)系。
LonWorks技術(shù)是Echelon公司于90年代推出的一種主要用于設(shè)備聯(lián)網(wǎng)的局域操作網(wǎng)絡(luò)技術(shù)LON(Local Operating Network)。LonWorks技術(shù)的優(yōu)勢(shì)是將通訊協(xié)議固化于Neuron芯片中,并且提供一套完整的開(kāi)發(fā)與建網(wǎng)工具——LonBuilder和NodeBuilder。這樣使得用戶(hù)可以較少關(guān)心網(wǎng)絡(luò)的通訊,而集中于節(jié)點(diǎn)的具體應(yīng)用開(kāi)發(fā)。LonWorks技術(shù)極大地方便了用戶(hù),也促進(jìn)了該技術(shù)的推廣應(yīng)用。
現(xiàn)場(chǎng)總線(xiàn)控制系統(tǒng)(FCS)是工業(yè)控制系統(tǒng)發(fā)展的必然趨勢(shì),然而在短時(shí)期內(nèi)它無(wú)法完全取代DCS系統(tǒng),因此現(xiàn)有的4~20mA模擬儀表到現(xiàn)場(chǎng)總線(xiàn)的接口開(kāi)發(fā)具有較強(qiáng)的可行性及現(xiàn)實(shí)意義。本文擬對(duì)基于LonWorks 網(wǎng)絡(luò)的PID控制節(jié)點(diǎn)的設(shè)計(jì)與開(kāi)發(fā)作一論述。
1 整體設(shè)計(jì)思想
現(xiàn)場(chǎng)儀表,如測(cè)量變送器、執(zhí)行器、調(diào)節(jié)閥等的輸入/輸出信號(hào)多為4~20mA模擬信號(hào)。本節(jié)點(diǎn)的任務(wù)是在完成現(xiàn)場(chǎng)模擬儀表與LonWorks網(wǎng)絡(luò)連接的基礎(chǔ)上,實(shí)現(xiàn)對(duì)被控對(duì)象的控制,即對(duì)現(xiàn)場(chǎng)儀表進(jìn)行測(cè)量信號(hào)采集,控制運(yùn)算及控制信號(hào)輸出。整體節(jié)點(diǎn)設(shè)計(jì)分為三部分:信號(hào)采集、控制運(yùn)算及信號(hào)輸出。
Neuron芯片能夠完成信息的輸入、處理、輸出,并可通過(guò)不同的收發(fā)器與不同的通訊介質(zhì)相連接,方便地實(shí)現(xiàn)網(wǎng)絡(luò)通訊。以其為中心器件,配以相關(guān)外圍電路構(gòu)成的節(jié)點(diǎn),實(shí)現(xiàn)了用戶(hù)應(yīng)用程序與組網(wǎng)通訊的統(tǒng)一。
本文設(shè)計(jì)的PID控制節(jié)點(diǎn)的結(jié)構(gòu)示意圖如圖1所示。
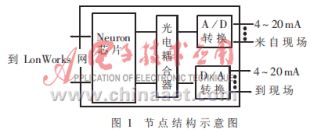
考慮到工業(yè)現(xiàn)場(chǎng)的電氣工作情況,為保護(hù)節(jié)點(diǎn)核心部分免受損壞,在模擬輸入/輸出與Neuron芯片之間加入光電耦合器件,從而提高了節(jié)點(diǎn)的抗干擾性能。
2 節(jié)點(diǎn)實(shí)現(xiàn)
2.1 關(guān)鍵技術(shù)
LonWorks技術(shù)的核心是Neuron芯片。它是由美國(guó)Motorola和日本東芝兩大芯片制造商生產(chǎn)的,共有兩個(gè)系列MC143150和MC143120。本設(shè)計(jì)采用的是MC143150,可帶片外存儲(chǔ)器類(lèi)型。該類(lèi)型專(zhuān)門(mén)用于需要較大應(yīng)用程序的傳感器控制系統(tǒng)。
MC143150芯片內(nèi)部有三個(gè)CPU,即:介質(zhì)訪問(wèn)CPU,網(wǎng)絡(luò)CPU,應(yīng)用CPU。它們與片內(nèi)存儲(chǔ)器、網(wǎng)絡(luò)通訊接口、定時(shí)/計(jì)數(shù)器、I/O口驅(qū)動(dòng)電路通過(guò)16位地址總線(xiàn)和8位數(shù)據(jù)總線(xiàn)相連。芯片內(nèi)部結(jié)構(gòu)示意圖如2所示。
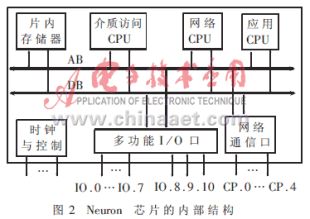
Neuron芯片有11個(gè)可編程的I/O引腳,并提供四類(lèi)共34種I/O對(duì)象。通過(guò)引腳的不同配置,為外部硬件提供靈活的接口,實(shí)現(xiàn)不同的I/O對(duì)象。這四類(lèi)I/O對(duì)象為:直接I/O、并行I/O、串行I/O和計(jì)時(shí)器/計(jì)數(shù)器I/O對(duì)象。
本設(shè)計(jì)選用串行I/O對(duì)象中的Neuronware對(duì)象。該對(duì)象通過(guò)Neuron芯片11個(gè)引腳中的IO.8~I(xiàn)O.10進(jìn)行三線(xiàn)串行傳輸,IO.0~I(xiàn)O.7可作為片選信號(hào)輸出。數(shù)據(jù)傳輸以8位為單位,一次最多可傳輸255位。對(duì)于10MHz晶振輸入的Neuron芯片,其串行時(shí)鐘頻率為20kHz,串行數(shù)據(jù)傳輸速率滿(mǎn)足現(xiàn)場(chǎng)控制要求。
Neuron芯片的輸入/輸出對(duì)象中有parallel并行I/O對(duì)象。該對(duì)象有3.3Mbps的高傳輸速率,但由于其適用于8位并行數(shù)據(jù),而且占用I/O引腳較多,功能擴(kuò)展較復(fù)雜。所以不采用并行I/O對(duì)象。
2.2 節(jié)點(diǎn)硬件/軟件設(shè)計(jì)
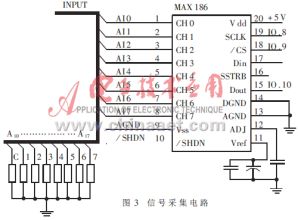
信號(hào)采集部分,采用高速、串行12位、8通道模數(shù)轉(zhuǎn)換器MAX186。現(xiàn)場(chǎng)4~20mA測(cè)量信號(hào)經(jīng)過(guò)200Ω精密電阻變?yōu)?.8~4V電壓,進(jìn)入MAX186的輸入通道。MAX186具有一個(gè)內(nèi)部4.096V基準(zhǔn)源,每一通道帶跟蹤/保持(T/H)電路,最高采樣頻率可達(dá)133kHz。其SCLK、Din、Dout引腳分別與Neuron芯片的IO.8、IO.9、IO.10相連。IO.1作為MAX186的片選信號(hào)(/CS)。MAX186的控制字的寫(xiě)入與轉(zhuǎn)換數(shù)據(jù)的輸出通過(guò)串行數(shù)據(jù)線(xiàn)完成。其各個(gè)輸入通道由控制字進(jìn)行選擇。MAX186外部接線(xiàn)簡(jiǎn)潔。
信號(hào)采集電路如圖3所示。
MAX186接口程序?yàn)椋?BR> IO_8 neuroware master select(IO_1) MAX186;
//定義I/O對(duì)象為neuroware,IO_8為時(shí)鐘輸出引腳;IO_9為串行數(shù)據(jù)輸出引腳;IO_10為串行數(shù)據(jù)輸入引腳;選擇主模式,MAX186片選信號(hào)由IO_1輸出;數(shù)據(jù)在時(shí)鐘上升沿被傳輸//
IO_1 output bit MAX186_CS=1;
//定義IO_1為位輸出,作MAX186的片選信號(hào)//
When(timer_expires(clock_1))
// 定時(shí)/計(jì)數(shù)器clock_1滿(mǎn)事件驅(qū)動(dòng)//
Io_out(MAX186_CS,0);
//選中MAX186//
Io_out(MAX186,10001111);
//向MAX186送控制字:選擇通道0,單極性,單端輸入,外部時(shí)鐘模式//
Input=io_in(MAX186,&input,16);
//輸入轉(zhuǎn)換結(jié)果//
Input=input>>4;
Io_out(MAX186_CS,1);
//不選中MAX186,結(jié)束信號(hào)采集//
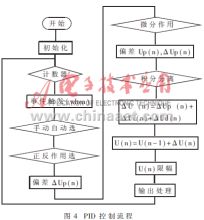
控制運(yùn)算部分主要通過(guò)對(duì)Neuron芯片編程完成。Neuron芯片的編程語(yǔ)言為由ANSI C發(fā)展而來(lái)的Neuron C語(yǔ)言。它包括對(duì)ANSI C的擴(kuò)展,并增添了一些較強(qiáng)的功能,如:網(wǎng)絡(luò)變量類(lèi)型,事件調(diào)度when語(yǔ)句。網(wǎng)絡(luò)變量簡(jiǎn)化了節(jié)點(diǎn)間的數(shù)據(jù)共享。本設(shè)計(jì)中PID控制運(yùn)算的設(shè)定值、比例放大系數(shù)、積分/微分時(shí)間等數(shù)值均通過(guò)網(wǎng)絡(luò)變量的形式傳送。
PID控制運(yùn)算的流程圖如圖4所示。
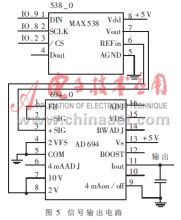
信號(hào)輸出部分選用串行12位數(shù)模轉(zhuǎn)換器MAX538。由于現(xiàn)場(chǎng)執(zhí)行機(jī)構(gòu)多接收4~20mA信號(hào),所以需要將MAX538的電壓輸出轉(zhuǎn)換成電流信號(hào),為此選用AD694完成電壓/電流轉(zhuǎn)換。AD694具有內(nèi)部電壓基準(zhǔn),可輸出作為MAX538的D/A轉(zhuǎn)換基準(zhǔn),簡(jiǎn)化了電路設(shè)計(jì),節(jié)省了空間。另外,AD694有較強(qiáng)的驅(qū)動(dòng)能力,對(duì)于需要免除噪聲的4~20mA信號(hào)傳遞以驅(qū)動(dòng)操作電子管、傳動(dòng)裝置和其他控制器件,它是理想的選擇。
本PID控制節(jié)點(diǎn)設(shè)計(jì)為兩路輸出,片選信號(hào)分別由IO.2、IO.3給出,具體電路如圖5所示。
信號(hào)輸出部分接口程序?yàn)椋?BR> IO_8 neuroware master select(IO_2)
MAX538;
IO_2 output bit MAX538_CS=1;
Io_out(MAX538_CS,0);
Io_out(MAX538,&output,16);
Io_out(MAX538_CS,1);
總之,本文設(shè)計(jì)的基于LonWorks 網(wǎng)絡(luò)的PID控制節(jié)點(diǎn), 經(jīng)過(guò)實(shí)驗(yàn)驗(yàn)證是切實(shí)可行的。它具有組網(wǎng)方便、集成度高、成本低等特點(diǎn)。利用它與其它種類(lèi)的測(cè)控節(jié)點(diǎn)配合,加上上位操作管理計(jì)算機(jī),可以容易地構(gòu)成徹底分散的、地域分布的網(wǎng)絡(luò)測(cè)控系統(tǒng)。這種系統(tǒng)可用于污水處理、過(guò)程控制、樓宇自動(dòng)化等場(chǎng)合。
參考文獻(xiàn)
1 Echelon公司.Neuron C參考手冊(cè).1995
2 Echelon公司.Neuron C程序員指南.1995
3 MOTOROLA公司.LonWorks Technology Device Data 1996