
2 目標自動跟蹤系統(tǒng)的硬件電路設計
在基于 VxWorks嵌入式系統(tǒng)下,根據(jù)坦克目標自動跟蹤系統(tǒng)的總體技術(shù)要求,需要完成 I/O板硬件結(jié)構(gòu)電路的設計;PCI9054的配置;接口驅(qū)動程序的編寫以及系統(tǒng)主程序的設計,實現(xiàn)目標自動跟蹤計算機與坦克火控系統(tǒng)之間的數(shù)據(jù)通信。
下面就坦克目標自動跟蹤系統(tǒng)總體設計進行論述。坦克目標自動跟蹤系統(tǒng)包括通用視頻跟蹤器的所有功能,系統(tǒng)硬件由跟蹤器主機、瞄準線功率驅(qū)動模塊、視場圖像及相關(guān)信息顯示器、前端圖像采集系統(tǒng)和連接電纜等幾部分組成。跟蹤器主機由主機板、 DSP板、圖像圖形板、I/O板、電源板和機箱、無源底板、插接件組成,主要完成圖像采集、處理并輸出控制;瞄準線驅(qū)動控制模塊主要對跟蹤器主機輸出的控制信號進行功率放大來驅(qū)動瞄準線;顯示器用于顯示視野圖像及相關(guān)信息;前端圖像采集系統(tǒng)主要指火控系統(tǒng)光學改造部件及圖像采集器 CCD;連接電纜用于實現(xiàn)目標自動跟蹤系統(tǒng)各部件的信號連接。坦克目標自動跟蹤系統(tǒng)組成如圖1:
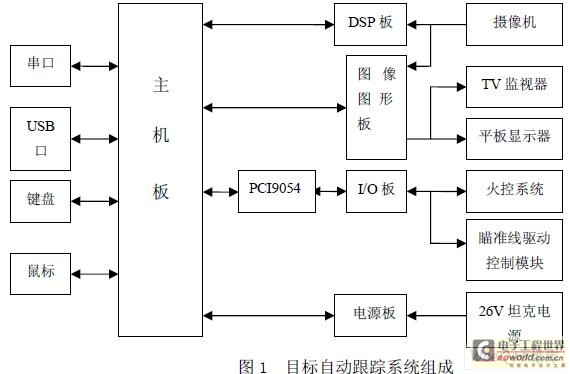
從圖 1中可知,系統(tǒng)通信與控制模塊(亦稱 I/O板)是通用型的目標自動跟蹤器與火控系統(tǒng)相連接的橋梁,在目標自動跟蹤火控系統(tǒng)中具有極其重要的作用。它要求實時處理 DSP板傳送的目標現(xiàn)在點和瞄準線中心的偏差量,最終轉(zhuǎn)化為對瞄準線的控制量。將瞄準線控制量傳送給瞄準線驅(qū)動控制模塊,實現(xiàn)高精度控制瞄準線,使之始終對準目標。
3 在 VxWorks下的驅(qū)動程序設計
3.1設備驅(qū)動程序的設計與實現(xiàn)
應用程序必須通過驅(qū)動程序才能與硬件進行數(shù)據(jù)通信,而驅(qū)動程序的編寫與操作系統(tǒng)密切相關(guān)。在 VxWorks操作系統(tǒng)中, BSP板級支持包向 VxWorks提供與硬件環(huán)境的接口,負責完成加電時的硬件初始化、為 VxWorks訪問硬件驅(qū)動程序提供支持、將 VxWorks中與硬件有關(guān)以及與硬件無關(guān)的軟件進行集成。因此在 VxWorks下編寫驅(qū)動程序時首先要對 BSP進行修改配置。根據(jù)本系統(tǒng)的實際情況需要修改 config.h頭文件:
#define DEFAULT_BOOT_LINE \ "fei(0,0)host: VxWorks h=172.16.21.100 e=172.16.21.253 u=chb pw=123456"在 VxWorks中,設備驅(qū)動程序有查詢方式和中斷方式二種。無論采用哪一種方式,設備驅(qū)動程序的基本流程都是相同的,如圖 2:
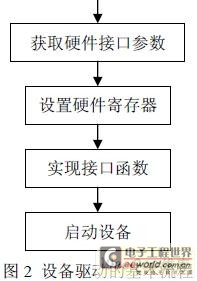
從圖 2中可以看出,編寫設備驅(qū)動程序的第一步是獲取硬件接口參數(shù),包括內(nèi)存映射地 址、I/O端口和系統(tǒng)中斷控制器的輸入(IRQ)。獲取這些參數(shù)的方法由硬件的接口方式?jīng)Q定。例如,PCI總線作為一種即插即用的總線結(jié)構(gòu),在 BIOS和操作系統(tǒng)的支持下,能夠自動為設備分配合適的硬件接口參數(shù)。其部分程序代碼如下:
1) 定義常量和全局變量 #define PCI9054_DEVICE_ID 0x9054 #define PCI9054_VENDOR_ID 0x10B5 #define PCI9054_MEMSIZE 0x00001000 #define PCI9054_INIT_STATE_MASK (VM_STATE_MASK_VALID | VM_STATE_MASK_WRITABLE | VM_STATE_MASK_CACHEABLE) #define PCI9054_INIT_STATE (VM_STATE_ VALID | VM_STATE_ WRITABLE | VM_STATE_ CACHEABLE_NOT) Typedef struct pci9054Info { UNIT pciBus,pciDevice,pciFunc; Char irq; }PCI9054_INFO; LOCAL PCI9054_INFO pci9054InfoTable={-1,-1,-1,-1};
2)獲取硬件接口參數(shù) Void sysPci9054Init(void) {int pciBus, pciDevice, pciFunc; Int intdex = 0; UINT32 membaseCsr; Char irq; PCI9054_INFO pciRes; pciRes = &pci9054InfoTable; //利用供應商標識和設備標識確定設備的總線號、設備號和功能號,在系統(tǒng)中查找設備 pciFindDevice(VENDER_ID, DEVICE_ID, 0, &pciBus, &pciDevice, &pciFunc) == DDRESS_1, &membaseCsr); //確定映射到系統(tǒng)中的設備基地址 membaseCsr&= PCI_MEMBASE_MASK; //獲得設備的 IRQ pciConfigInByte (pciBus, pciDevice, pciFunc,PCI_CFG_DEV_INT_LINE, &irq); //將設備映射到內(nèi)存中 sysMmuMapAdd((void)membaseCsr, PCI9054_MEMSIZE , (UINT)PCI9054_INIT_STATE_MASK, (UINT) PCI9054_INIT_STATE); //保存總線號、設備號、功能號和 IRQ pciRes->pciBus = pciBus; pciRes->pciDevice = pciDevice; pciRes->pciFunc = pciFunc; pciRes->irq = irq; //配置設備的 PCI命令寄存器以控制設備 pciConfigOutWord(pciBus,pciDevice,pciFunc,PCI_CFG_COMMAND,PCI_CMD_MEM_ENAB LE|PCI_CMD_MASTER_ENABLE|PCI_CMD_PERR_ENABLE|PCI_CMD_SERR_ENABLE); }
3)設置硬件寄存器 Void setPci9054Reg() {……… }
4) 實現(xiàn)接口函數(shù) Void sysPci9054Intr(int pci9054IntPara) {……… }
5) 啟動設備 Void startPci9054() {……… }
3.2 系統(tǒng)主程序的設計
坦克目標自動跟蹤系統(tǒng)的主程序設計流程如圖 3所示:
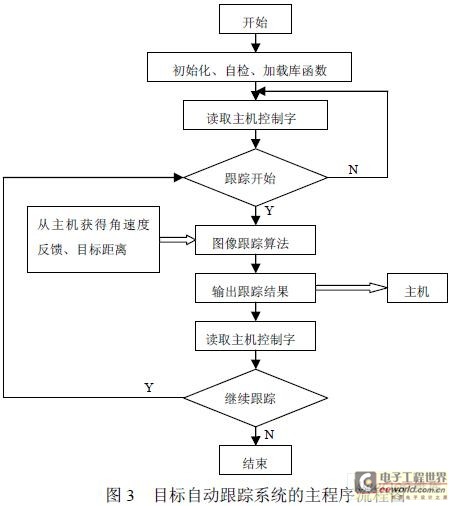
目標自動跟蹤系統(tǒng)的主程序的工作原理是:當炮長瞄準目標并測距后,測距指令同時作為自動跟蹤指令啟動自動跟蹤。自動跟蹤器根據(jù) CCD攝像機視頻信號逐幀進行圖像處理,求出瞄準線與目標的失調(diào)量,驅(qū)動瞄準線自動跟蹤目標。瞄準鏡輸出目標距離、目標角速度和火炮位置給火控計算機。火控計算機根據(jù)目標距離、目標角速度、橫風速度等解算彈道并通過炮控裝定火炮的射擊諸元。當火炮裝定到位時,計算機給出允許射擊信號接通擊發(fā)電路,此時若炮長按下射擊按鈕,火炮即可發(fā)射。火炮發(fā)射后退出自動跟蹤,由炮長操縱瞄準鏡。
4 結(jié)論
在基于 VxWorks的嵌入式系統(tǒng)下開發(fā)的國產(chǎn)某新型坦克的目標自動跟蹤系統(tǒng)滿足了目標自動跟蹤系統(tǒng)的實時性要求,能夠?qū)C動目標狀態(tài)信息進行處理,主要達到的性能和技術(shù)指標如下:在 3000m有效射程內(nèi),能實時、準確地實現(xiàn)對單個機動目標的捕獲和跟蹤,跟蹤丟失率≤ 10%;在目標被遮蔽后,具備預測跟蹤能力。跟蹤精度(包括火控系統(tǒng)誤差在內(nèi))為 0.6mil。由以上結(jié)論可以看出,本系統(tǒng)已經(jīng)具備了初步智能化目標自動識別、跟蹤及較好的抗干擾能力,實時性達到系統(tǒng)要求,并且有進一步提高的基礎,具有廣泛的應用前景。本文作者創(chuàng)新點:首次在VxWorks嵌入式操作系統(tǒng)下開發(fā)設計了目標自動跟蹤系統(tǒng),提高了坦克火控系統(tǒng)對單個機動目標的捕獲和自動跟蹤能力。