
摘 要: 介紹一種以80C196KC為核心的通信電源監(jiān)控系統(tǒng)及整流模塊的實(shí)現(xiàn)方案,討論了系統(tǒng)的硬件結(jié)構(gòu),軟件設(shè)計(jì)及功能,并對系統(tǒng)的可靠性及抗干擾措施進(jìn)行了闡述。
關(guān)鍵詞: 80c196KC 監(jiān)控 整流
智能化高頻開關(guān)電源是一代新型直流電源裝置,它具有高度靈活組合、自主監(jiān)控的特點(diǎn)。目前應(yīng)用十分廣泛,尤其在通信領(lǐng)域,因其具有體積小、噪音低、維護(hù)方便又可被納 入通信系統(tǒng)的計(jì)算機(jī)監(jiān)控系統(tǒng)等優(yōu)點(diǎn),從而基本上取代了相控穩(wěn)壓電源。本文闡述了一種5kW通信電源整流模塊及其二級(jí)監(jiān)控系統(tǒng)的實(shí)現(xiàn)方案,并給出了部分軟件的流程圖。
1 系統(tǒng)硬件原理
圖1示出整個(gè)電源系統(tǒng)的原理框圖。系統(tǒng)中各功能模塊都具有自己獨(dú)立的監(jiān)控功能,可完成對所監(jiān)控模塊的管理。本文將主要討論高頻開關(guān)整流模塊和主監(jiān)控模塊。
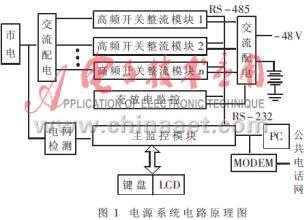
1.1 高頻開關(guān)整流模塊
整流模塊是一種智能化高頻開關(guān)穩(wěn)壓模塊,其原理框圖見圖2。它采用無工頻變壓器的整流結(jié)構(gòu),主要由PWM控制器、逆變器、信號(hào)取樣、單片機(jī)控制器及負(fù)載均流等部分組成。其中逆變器采用IGBT構(gòu)成的全橋逆變器。PWM控制器采用移相式PWM控制器UC3875,它在單片機(jī)80C196KC的控制下,根據(jù)反饋的電壓電流值與設(shè)定值的差,輸出相移變化的PWM脈沖,經(jīng)驅(qū)動(dòng)、放大及整形后,控制逆變橋中IGBT的關(guān)斷或?qū)ǎ愿淖冚敵鲭妷旱拇笮 ?/P>

為了實(shí)現(xiàn)多機(jī)并聯(lián)運(yùn)行的目的,本系統(tǒng)采用了負(fù)載自動(dòng)均流電路,其核心是Unitrode公司的UC3907負(fù)載均流控制器。當(dāng)多機(jī)并聯(lián)運(yùn)行時(shí),整流模塊中3907的CSB腳并聯(lián)于均流母線CSB上,由于3907采用的是最大電流均流法,所以在均流母線上反映的是輸出電流最大的模塊的電流,當(dāng)本模塊的電流小于CSB電流時(shí),3907的輸出就會(huì)改變3875的反饋電壓值,從而改變PWM控制器移相脈沖的相移,進(jìn)而改變輸出電壓和電流,使得該模塊電流與最大電流一致,實(shí)現(xiàn)自動(dòng)均流的目的。
為使整個(gè)電源系統(tǒng)具有自診斷和人機(jī)交互的控制功能,每個(gè)整流模塊都具有本身的監(jiān)控部分,以擔(dān)負(fù)本地監(jiān)控以及與主監(jiān)控模塊通信的任務(wù)。整流模塊的單片機(jī)所承擔(dān)的任務(wù)是檢測輸出電壓、電流及溫度,向PWM控制器發(fā)送輸出電壓值及最大限流值指令,負(fù)責(zé)開啟冷卻風(fēng)扇、告警等,并允許各模塊退出或投入系統(tǒng)。
單片機(jī)還定期將本模塊的電壓、電流值及故障情況傳送給主監(jiān)控模塊,同時(shí)也接收來自主監(jiān)控模塊的命令。模塊間的通信采用RS-485總線方式,接口芯片為MAXIM公司的MAX1480B,該芯片是完整的電氣隔離的RS-485轉(zhuǎn)換器,具有良好的抗干擾能力,適合應(yīng)用于惡劣的電磁環(huán)境中。
1.2 主監(jiān)控模塊
系統(tǒng)主監(jiān)控模塊作為一個(gè)獨(dú)立的模塊,可監(jiān)控整個(gè)電源系統(tǒng)的工作狀態(tài),控制各模塊的投入和退出,完成人機(jī)對話,實(shí)現(xiàn)與外部PC或遠(yuǎn)端主機(jī)的通信。
圖3是該模塊的原理框圖。系統(tǒng)采用Intel公司的80C196KC作主控制器,用本身的TXD、RXD經(jīng)RS-485轉(zhuǎn)換后與各模塊通信,又通過外接8250擴(kuò)展出RS-232接口與PC或遠(yuǎn)端主機(jī)通信。為實(shí)現(xiàn)本地的人機(jī)交互操作,系統(tǒng)采用了大屏幕的LCD界面和24鍵的鍵盤,并可直接外掛EPSON1600K打印機(jī)。為了滿足自動(dòng)監(jiān)控的需要,監(jiān)控模塊設(shè)有8路數(shù)字量輸入口,6路繼電器輸出口,5路A/D輸入,3路D/A輸出及兩路告警輸出。

主監(jiān)控系統(tǒng)檢測直流母線電壓、電流,當(dāng)電壓或電流大于上限設(shè)定值時(shí),便命令整流模塊降壓限流,并根據(jù)各整流模塊的工作狀況,決定每個(gè)模塊的退出和投入,從而使整個(gè)電源系統(tǒng)工作在穩(wěn)定的狀態(tài)下。
此外,為了整個(gè)電源系統(tǒng)的安全,主監(jiān)控系統(tǒng)還對電網(wǎng)電壓的波動(dòng)進(jìn)行檢測。當(dāng)網(wǎng)壓異常時(shí),主監(jiān)控模塊將切除電網(wǎng)輸入,同時(shí)發(fā)出告警信號(hào),并記錄故障信息。
2 系統(tǒng)軟件
本系統(tǒng)采用集中管理、獨(dú)立控制的模式,各模塊都有自己獨(dú)立的監(jiān)控程序,當(dāng)個(gè)別模塊出現(xiàn)故障時(shí),不會(huì)影響整機(jī)運(yùn)行。由于篇幅限制,本文只給出監(jiān)控模塊的軟件結(jié)構(gòu)。
主監(jiān)控模塊軟件采用模塊化結(jié)構(gòu)設(shè)計(jì),各種功能都由相應(yīng)的中斷子程序完成。圖4是主程序流程圖。

系統(tǒng)的初始化包括MCU內(nèi)部控制寄存器的初始化,寄存器區(qū)及數(shù)據(jù)區(qū)的初始化等。自檢包括RAM自檢及控制系統(tǒng)各傳感器自檢,自檢通過后開放中斷及PTS,并調(diào)用顯示初始化子程序,顯示系統(tǒng)主菜單可用鍵盤選擇各子菜單,包括運(yùn)行參數(shù)菜單、狀態(tài)菜單、故障記錄菜單及參數(shù)設(shè)置菜單。其中參數(shù)設(shè)置菜單僅供具有權(quán)限的維護(hù)人員使用,須輸入密碼才可進(jìn)行操作。通信握手通過發(fā)送特征碼55H及接收回彈的AAH來確定通信系統(tǒng)的正常與否。
執(zhí)行完初始化及自檢后,系統(tǒng)進(jìn)入監(jiān)控狀態(tài),可接收鍵盤中斷,同時(shí)保持串口接收中斷有效。鍵盤中斷子程序如圖5所示。串口數(shù)據(jù)的發(fā)送由子程序調(diào)用完成,接收由中斷實(shí)現(xiàn),按數(shù)據(jù)的不同類型進(jìn)行相應(yīng)的處理。串口接收子程序如圖6所示。
 ?
? 
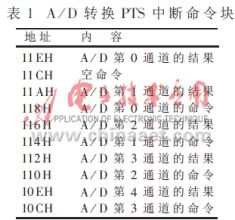
由于本系統(tǒng)檢測的模擬量較多,對于A/D轉(zhuǎn)換,系統(tǒng)采用了80C196KC所提供的新功能PTS中斷。它以微代碼方式運(yùn)行中斷子程序,此普通中斷速度快,而且由于PTS提供了一種A/D掃描模式,使得對多個(gè)A/D處理更為方便。表1是用于實(shí)現(xiàn)A/D的PTS中斷的命令塊。
 ?
? 
首先在主程序中啟動(dòng)ACH4的A/D轉(zhuǎn)換,當(dāng)該轉(zhuǎn)換完成時(shí),便引發(fā)一次A/D結(jié)束中斷,進(jìn)而產(chǎn)生一次PTS中斷。當(dāng)PTS中斷執(zhí)行時(shí),它首先讀取PTS控制塊的內(nèi)容,如表2所示,依次為命令計(jì)數(shù)器,命令寄存器,源/目的寄存器和結(jié)果寄存器。根據(jù)源/目的寄存器的內(nèi)容,讀取該地址的A/D命令并執(zhí)行,然后根據(jù)命令寄存器的UPDT位的值,將源/目的寄存器的地址加二,把上一通道的轉(zhuǎn)換結(jié)果送入該寄存器,同時(shí)計(jì)數(shù)器減一,這樣完成一個(gè)PTS周期。直到計(jì)數(shù)器為零,PTS中斷結(jié)束。
3 可靠性設(shè)計(jì)及抗干擾措施
·主電路中主開關(guān)采用帶保護(hù)的IGBT模塊,并外加snubber電路。
·加入冗余整流模塊,個(gè)別模塊出現(xiàn)故障時(shí),不會(huì)影響整機(jī)運(yùn)行。
·所有的保護(hù)及安全電路都設(shè)有全硬件繼電保護(hù),各模塊入口設(shè)熔斷保護(hù)。
·為減少電磁輻射干擾的影響,對控制板進(jìn)行了屏蔽。
·采用單點(diǎn)接地和隔離電源供電,消除共阻抗回路。數(shù)字地線、模擬地線、信號(hào)源地線和負(fù)載地線分開設(shè)置。數(shù)字電路、模擬電路和負(fù)載電路分別單獨(dú)供電,獨(dú)自構(gòu)成回路且單點(diǎn)接地。
·加強(qiáng)電源退耦,電源線與地線之間加退耦電容。
·A/D轉(zhuǎn)換采用軟件濾波,以減小干擾的影響,提高測量和計(jì)算的準(zhǔn)確性。
·為防止微機(jī)控制器程序執(zhí)行出錯(cuò)或進(jìn)入死循環(huán),設(shè)WATCHDOG,超出定時(shí)時(shí)間后能自動(dòng)使系統(tǒng)復(fù)位。
總之,本系統(tǒng)采用分級(jí)控制結(jié)構(gòu),便于系統(tǒng)的升級(jí)和維護(hù),同時(shí)也提高了系統(tǒng)的安全性。系統(tǒng)在實(shí)驗(yàn)室調(diào)試、運(yùn)行穩(wěn)定,下一步將進(jìn)行產(chǎn)品化的研究。
參考文獻(xiàn)
1 8X196KC/KD User's Manual. Intel Corporation,1993
2 何立民著.單片機(jī)應(yīng)用系統(tǒng)設(shè)計(jì).北京:北京航空航天大學(xué)出版社
3 齊懷印,盧錦著.高級(jí)邏輯器件與設(shè)計(jì).北京:電子工業(yè)出版社