
關(guān)鍵字:ARM GPS地面目標(biāo)跟蹤
隨著現(xiàn)代化科技的發(fā)展,人們對(duì)移動(dòng)目標(biāo)監(jiān)控的要求越來(lái)越高。例如,地面目標(biāo)跟蹤及報(bào)警系統(tǒng)可協(xié)助家長(zhǎng)實(shí)現(xiàn)對(duì)孩子的監(jiān)控,孩子若遭遇走失或劫持事件,監(jiān)控中心通過(guò)分析手持終端發(fā)送的GPS數(shù)據(jù)確定孩子所在位置,以采取相關(guān)安全措施。
1 引言
此外,地面目標(biāo)跟蹤及報(bào)警系統(tǒng)在城市出租車調(diào)度、物流運(yùn)輸監(jiān)控等領(lǐng)域都有著廣泛的應(yīng)用前景。
地面目標(biāo)跟蹤及報(bào)警系統(tǒng)是伴隨著GPS技術(shù)和GSM網(wǎng)絡(luò)的成熟而發(fā)展起來(lái)的。20世紀(jì)90 年代初,GPS技術(shù)逐漸興起,基于GPS的移動(dòng)跟蹤、監(jiān)控系統(tǒng)開(kāi)始走向市場(chǎng)。近年來(lái),GSM網(wǎng)絡(luò)發(fā)展迅速,其數(shù)據(jù)傳輸能力明顯加強(qiáng),并且,GPS技術(shù)更加成熟。2000年5月1日,美國(guó)政府宣布取消GPS普通定位的選擇干擾(SA)政策,這樣,一般GPS接收機(jī)定位精度可以達(dá)到25 m。綜合上述,采用GPS和GSM網(wǎng)絡(luò),以低功耗ARM微控制器展開(kāi)設(shè)計(jì)的地面目標(biāo)跟蹤及報(bào)警系統(tǒng)勢(shì)必得到迅猛發(fā)展,市場(chǎng)潛力巨大。
2 GPS和GSM簡(jiǎn)介
全球定位系統(tǒng)(Global Positioning System,GPS)是美國(guó)從20世紀(jì)70年代開(kāi)始研制,歷時(shí)20年,耗資200億美
GPS以全天候、高精度、自動(dòng)化、高效益等顯著特點(diǎn),廣泛地應(yīng)用于大地測(cè)量、地質(zhì)勘探和車輛導(dǎo)航等方面,近年來(lái)隨著GPS模塊成本的不斷下降和地面通信系統(tǒng)的不斷發(fā)展,GSM和GPS技術(shù)相結(jié)合的系統(tǒng)正如火如荼地向前發(fā)展。
3 系統(tǒng)的組成結(jié)構(gòu)
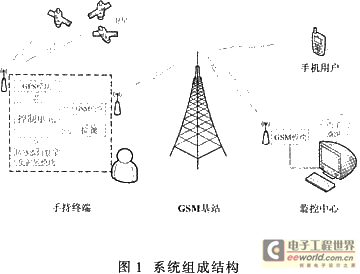
地面目標(biāo)跟蹤及報(bào)警系統(tǒng)由手持終端和監(jiān)控中心兩大部分組成,如圖1所示。其中手持終端以ARM微控制器為核心,通過(guò)UART0和UART1分別連接GPS模塊和GSM模塊(發(fā)送);監(jiān)控中心由PC機(jī)和GSM模塊(接收)構(gòu)成,PC機(jī)中安裝的電子地圖軟件用于解析GSM模塊傳來(lái)的定位信息,并精確顯示出被跟蹤目標(biāo)的具體地理位置。
4 系統(tǒng)的硬件設(shè)計(jì)
4.1 手持終端部分
手持終端由ARM微控制器、GPS模塊、GSM模塊、按鍵、LCD構(gòu)成。其結(jié)構(gòu)如圖2所示。
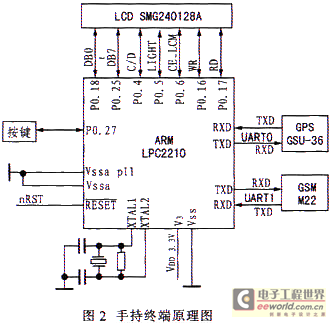
手持終端以LPC2210為主控制器,LPC2210是基于實(shí)時(shí)仿真和跟蹤的16/32位ARM7TDMI-SCPU的微控制器,并帶有256 KB的嵌入高速Flash存儲(chǔ)器;128位寬度的存儲(chǔ)器接口和獨(dú)特的加速結(jié)構(gòu),使32位代碼能夠在最大時(shí)鐘速率下運(yùn)行[1]。由于內(nèi)置了寬范圍的串行通信接口,從而給硬件設(shè)計(jì)和軟件移植都帶來(lái)了很大的便利。GPS模塊采用日本光電公司的GSU-36,體積小,功耗低,抗電磁干擾,可以同時(shí)跟蹤12顆衛(wèi)星。GSM模塊采用BENQ公司的M22。
LPC2210通過(guò)串行口UART0發(fā)送GPS采樣周期的設(shè)置、GPS數(shù)據(jù)類型選擇和通信波特率等控制命令和接收GPS定位信息。通過(guò)串行口UART1發(fā)送AT指令實(shí)現(xiàn)控制GSM的工作和傳送SMS。LCD顯示當(dāng)前的經(jīng)緯度和時(shí)間等信息,按鍵用來(lái)控制是否發(fā)送信號(hào)。
4.2 監(jiān)控中心部分
監(jiān)控中心由GSM模塊與PC機(jī)組成。采用OziExplorer作為監(jiān)控中心的電子地圖軟件,在PC機(jī)上安裝完OZI,設(shè)置好相關(guān)的端口參數(shù),即可實(shí)現(xiàn)將GSM模塊傳送來(lái)的定位信息實(shí)時(shí)顯示在電子地圖上。
5 系統(tǒng)的軟件設(shè)計(jì)
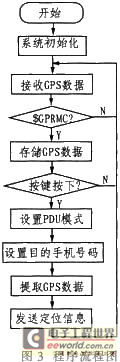
手持終端的相關(guān)程序用C語(yǔ)言編寫,程序流程如圖3所示。軟件設(shè)計(jì)主要包括系統(tǒng)初始化、GPS數(shù)據(jù)處理、GSM數(shù)據(jù)處理3大部分。
關(guān)鍵字:ARM GPS地面目標(biāo)跟蹤
5.1 系統(tǒng)初始化
系統(tǒng)初始化主要是對(duì)串行口的初始化,包括傳輸幀格式、波特率的設(shè)置。根據(jù)GPS模塊、GSM模塊的硬件特性,設(shè)置UART0波特率為4 800 b/s、UART1波特率為9 600 b/s,均無(wú)奇偶校驗(yàn)位,1位5.2 GPS數(shù)據(jù)處理 GPS模塊接收GPS衛(wèi)星定位信號(hào),判斷其為GPRMC格式,經(jīng)解析留下經(jīng)緯度、UTC時(shí)間等主要信息以待下一步處理,否則繼續(xù)接收GPS衛(wèi)星定位信號(hào)。
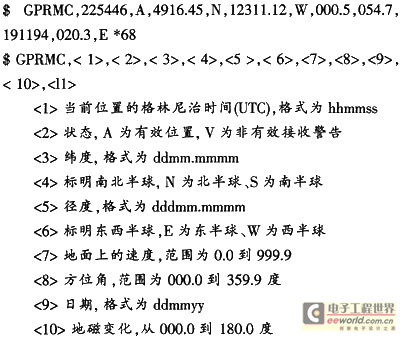
GPS模塊輸出的GPS定位信息服從NAME-0183通信標(biāo)準(zhǔn)。NAME-0183通信標(biāo)準(zhǔn)的輸出數(shù)據(jù)采用的是ASCII碼,其內(nèi)容包含了緯度、經(jīng)度、高度、速度、日期、時(shí)間、航向以及衛(wèi)星狀況等信息。語(yǔ)句有6種,包括GGA、GLL、GSA、GSV、RMC和VGT。本系統(tǒng)用到的是RMC紀(jì)錄語(yǔ)句,它包含了定位系統(tǒng)需要的所有信息。格式舉例:
5.3 GSM數(shù)據(jù)處理
確認(rèn)有按鍵按下時(shí)(啟動(dòng)鍵盤防抖動(dòng)程序),提取存儲(chǔ)的數(shù)據(jù),轉(zhuǎn)換成相應(yīng)的Unicode碼,即符合PDU格式。然后將最終有效的定位信息發(fā)送至監(jiān)控中心。
GSM的短信業(yè)務(wù)SMS利用信令信道傳輸,它不用撥號(hào)建立連接,把要發(fā)送的信息加上目的地址和其他控制信息發(fā)到短信服務(wù)中心,經(jīng)短信服務(wù)中心完成存儲(chǔ)再轉(zhuǎn)發(fā)送給目標(biāo)機(jī),這種特性適合數(shù)據(jù)遠(yuǎn)程傳送。每條短信息容量為140字符。GSM終端通過(guò)串行口控制SMS有三種接入?yún)f(xié)議,分別是BlockMode、基于AT命令的Text Mode和基于AT命令的PDU Mode。其中PDU Mode應(yīng)用最為廣泛。
本系統(tǒng)采用的是PDU Mode,采用AT命令完成短信息的讀取和發(fā)送。不同廠家生產(chǎn)的GSM模塊AT命令集會(huì)稍有不同,本系統(tǒng)采用的是BENQ公司的M22模塊,具體可以參考BENQ公司提供的數(shù)據(jù)手冊(cè)和《AT命令用戶手冊(cè)》等資料。比如發(fā)送一條消息可以采用AT+CMGS命令,格式如下:
AT+CMGS=<短信長(zhǎng)度>+<回車>+<目的手機(jī)號(hào)碼>+<回車>+<短信內(nèi)容>+
系統(tǒng)上電后,ARM微控制器開(kāi)始執(zhí)行主程序。在主程序中,首先進(jìn)行系統(tǒng)初始化,初始化的內(nèi)容包括GPS模塊和GSM模塊的基本參數(shù)設(shè)置,然后進(jìn)入主程序的數(shù)據(jù)處理部分。
6 系統(tǒng)的實(shí)現(xiàn)
6.1 實(shí)現(xiàn)步驟與結(jié)果
啟動(dòng)調(diào)試軟件ADS,通過(guò)實(shí)驗(yàn)板上的JATG接口將編好的源代碼編譯、燒寫進(jìn)ARM微控制器。將監(jiān)控中心GSM模塊上的SIM卡插放到手機(jī)中,讓手機(jī)充當(dāng)"臨時(shí)監(jiān)控中心"。將手持終端脫機(jī)上電運(yùn)行,4、5秒后按下實(shí)驗(yàn)板上的中斷觸發(fā)按鈕,略等片刻,手機(jī)便收到一條來(lái)自手持終端的信息,經(jīng)緯度為3907.9579N,11713.8762E,而實(shí)際精確經(jīng)緯度為3907.8933N,11713.8668E,略存在誤差。
取下手機(jī)的SIM卡,放至監(jiān)控中心的GSM模塊上。開(kāi)啟PC機(jī)上的電子地圖軟件OZI,設(shè)置COM1口的各參數(shù):波特率4 800 b/s、停止位1、無(wú)奇偶校驗(yàn),以使其與GSM模塊匹配。再一次上電運(yùn)行,點(diǎn)擊OZI上的"導(dǎo)航"按鈕。定位點(diǎn)正好停留在了天津市河?xùn)|區(qū)天津工業(yè)大學(xué)上,放大地圖,定位點(diǎn)落在了實(shí)驗(yàn)樓所在位置,地圖窗口下方也實(shí)時(shí)顯示出了定位點(diǎn)的經(jīng)緯度數(shù)值和當(dāng)前時(shí)間
6.2 誤差分析
系統(tǒng)調(diào)試初步通過(guò),還得測(cè)試其穩(wěn)定性、分析誤差所在。從實(shí)驗(yàn)結(jié)果得出,定位精度的誤差基本上控制在25 m以
7 結(jié)束語(yǔ)
基于ARM微控制器的嵌入式系統(tǒng)能夠完成所需的各種協(xié)議,能夠滿足系統(tǒng)的軟硬件需求。地面目標(biāo)跟蹤及報(bào)警系統(tǒng)整合了GPS、GSM技術(shù),利用GSM的SMS功能實(shí)現(xiàn)手持終端和監(jiān)控中心之間的數(shù)據(jù)傳送,以實(shí)施對(duì)目標(biāo)的實(shí)時(shí)定位跟蹤。在開(kāi)發(fā)測(cè)試中,可明顯感覺(jué)到與自建無(wú)線數(shù)據(jù)網(wǎng)相比,其可操作性及實(shí)時(shí)性有顯著提高,而且成本較低,結(jié)構(gòu)簡(jiǎn)單,可靠性較高。