
0 引言
薄膜厚度是薄膜性能參數(shù)的重要指標,如何準確、快速、方便地測量膜厚在實驗中具有十分重要的意義。邁克爾遜干涉儀測量激光波長是大學物理實驗中重要的一部分,實驗時實驗者手動調(diào)節(jié)微調(diào)手輪,人眼觀察干涉條紋,帶來很多人為誤差,影響測量結(jié)果。為了保護實驗者視力,提高測量精度,擴大測量范圍,同時促進光學教學實驗儀器的發(fā)展,在研究單片機的基礎(chǔ)上,對邁克爾遜干涉儀進行了探索和改造。
改造后的邁克爾遜干涉儀在不改變物理學基本原理的基礎(chǔ)上,增加了電子技術(shù)中的大量元素,使物理學和電子技術(shù)很好地結(jié)合起來,實現(xiàn)了對激光波長和薄膜厚度的自動測量。測量簡便、精確度高,有一定的實用性。
1 系統(tǒng)工作原理
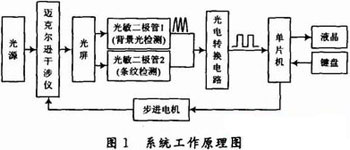
基于單片機改造的邁克爾干涉儀進行微小長度的自動測量,測量對象為激光波長和薄膜厚度,系統(tǒng)工作原理如圖1所示。
1.1 激光波長測量
使用He-Ne激光作光源,利用光的分振幅干涉法。用步進電機帶動微調(diào)手輪轉(zhuǎn)動代替手動調(diào)節(jié),電機旋轉(zhuǎn)角度對應光程差為2△d;光屏上得到的“吞”、“吐”條紋,通過光電轉(zhuǎn)換電路轉(zhuǎn)換為脈沖信號,輸入到單片機進行計數(shù)(條紋數(shù)N),代替了人眼觀察條紋計數(shù);測量步驟、結(jié)果(波長λ=2△d/N)及相對誤差通過液晶屏顯示,從而實現(xiàn)波長自動測量。
1.2 薄膜厚度測量
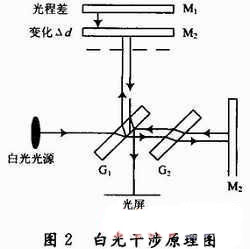
使用白光作光源,利用等厚干涉法。光路原理圖如圖2所示,當白光光程差為零時發(fā)生干涉現(xiàn)象,將光屏上的彩色條紋通過光電轉(zhuǎn)換電路轉(zhuǎn)換為脈沖信號,同時記錄M1的初位置d1;放入薄膜后,光程差增大,彩色條紋消失;電機帶動M1移動到彩紋再現(xiàn),記錄M1的末位置d2。用阿貝折射儀測出薄膜折射率n,輸入到單片機,根據(jù)公式![]() 進行處理,即可得到薄膜厚度。
進行處理,即可得到薄膜厚度。
2 系統(tǒng)結(jié)構(gòu)及硬件電路設計
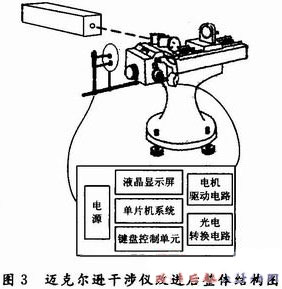
系統(tǒng)結(jié)構(gòu)主要是在原有物理光學儀器——邁克爾干涉儀的基礎(chǔ)上增加了電子技術(shù)的設計模塊,如圖3所示。模塊包括:單片機系統(tǒng)、鍵盤控制單元、電機驅(qū)動電路、光電轉(zhuǎn)換電路和液晶顯示單元。
2.1 光電轉(zhuǎn)換電路設計
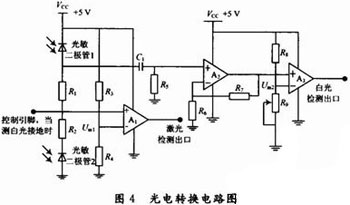
光電轉(zhuǎn)換電路由兩部分組成,如圖4所示,氦氖激光干涉條紋檢測和白光干涉彩紋檢測,它的作用是把變化的光信號轉(zhuǎn)換為可供單片機識別的脈沖信號。
2.1.1 激光干涉條紋檢測
該部分由兩個光敏二極管,偏置電阻R1,R2,分壓電阻R3,R4和一個運算放大器A1組成。當微調(diào)旋鈕轉(zhuǎn)動時,光屏上會出現(xiàn)圓環(huán)型“吞”、“吐”條紋,一個光敏二極管對準圓環(huán)條紋正中心,另一個用于檢測背景光,這樣設計可以大大減小外界光強的影響,在一般光強下均可測量。光敏二極管對變化的光信號敏感,加上偏置電阻R1和R2后會輸出合適的電信號。分壓電阻R3,R4給運算放大器的反向輸入端提供合適的門限電壓,電信號從同向輸入端輸入,當高于反向輸入端的門限電壓Um1時,輸出電壓翻轉(zhuǎn)到電源電壓的正極(+5V),當輸入電壓低于反向端的門限電壓Um1時,輸出電壓翻轉(zhuǎn)到電源電壓的地(0V)。由此,“吞”、“吐”條紋轉(zhuǎn)換為了脈沖信號。
2.1.2 白光干涉彩紋檢測
該部分由光敏二極管1,偏置電阻R1,放大器A2和門限比較器A3組成。它的原理與激光類似,當彩紋出現(xiàn)時,光強度變化會使光敏二極管1產(chǎn)生微弱的電信號,此信號經(jīng)過放大器A2被放大(放大器的放大倍數(shù)由電阻R6和R7決定),再經(jīng)過門限比較器A3(門限比較器的門限值由電阻R8和R9確定),最后轉(zhuǎn)變?yōu)榱嗣}沖信號。
2.2 步進電機驅(qū)動電路設計
步進電機是一種將電脈沖轉(zhuǎn)化為角位移的開環(huán)控制元件,它的轉(zhuǎn)速、停止的位置只取決于脈沖信號的頻率。采用步進電機帶動邁克爾干涉儀的微調(diào)旋鈕轉(zhuǎn)動,避免了很多人為因素對測量的干擾。本作品選用28BYJ-48型步進電機,它的步進值小,提高了測量的精確度。
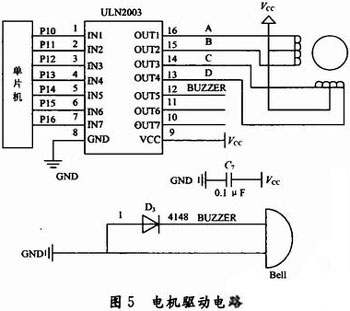
步進電機一經(jīng)選定,其性能取決于電機的驅(qū)動電壓。步進電機轉(zhuǎn)速越高,力矩越大則要求電機的電流越大,驅(qū)動電源的電壓越高。單片機I/O口流出的電流太小不能驅(qū)動電機轉(zhuǎn)動,需要外接驅(qū)動芯片增大電流。選用高壓大電流達林頓晶體管陣列ULN2003驅(qū)動28BYJ-48型步進電機,其工作原理如下:當輸入端為高電平時,ULN2003輸出端為低電平;當輸入端為低電平時,ULN2003輸出端為高電平。驅(qū)動電路如圖5所示。
2.3 液晶顯示單元和鍵盤控制單元
鍵盤用作數(shù)據(jù)輸入和測量步驟控制,本設計使用4×4的矩陣鍵盤,相對于獨立按鍵,矩陣鍵盤大大節(jié)省了單片機的I/O口,擴大了按鍵功能,同時也節(jié)省了硬件資源。液晶屏作為人機交互界面,顯示實驗數(shù)據(jù)和測量信息。
3 軟件設計
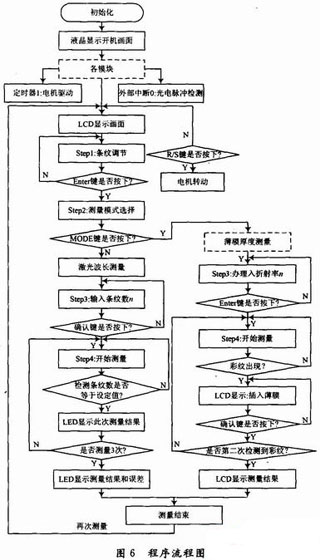
軟件設計是實現(xiàn)測量的主體。單片機的應用系統(tǒng)程序設計,常用的是匯編語言和C語言。相對于匯編語言,C語言簡潔,使用方便、靈活,可重用性高,可移植性強,所以系統(tǒng)采用C語言編寫程序,程序流程如圖6所示。
下面對程序的關(guān)鍵部分進行說明。
3.1 光電轉(zhuǎn)換部分的脈沖計數(shù)程序設計
用單片機的外部中斷INT0腳檢測光電轉(zhuǎn)換得到的脈沖信號。當有一個脈沖的下降沿到來時,外部中斷服務程序執(zhí)行一次。在中斷服務程序中設置記錄脈沖個數(shù)的變量mai_chong_ji_shu。在兩次脈沖間隔超過50ms的情況下,每進入中斷服務程序一次,mai_chong_ji_shu加1。如果兩次脈沖間隔不超過50ms,說明出現(xiàn)了毛刺信號,mai_chong_ji_shu不會加1,這樣設計可以除去毛刺信號。
3.2 步進電機驅(qū)動及自動調(diào)速程序設計
驅(qū)動步進電機轉(zhuǎn)動的脈沖信號頻率越大,電機轉(zhuǎn)速越高,但頻率不能過大也不能過小,否則電機都不會轉(zhuǎn)動。通過軟件延時或定時器中斷的方法可以控制電機的轉(zhuǎn)速。軟件延時會大量浪費CPU資源,所以采用單片機的定時器0中斷來驅(qū)動28BYJ-48型步進電機轉(zhuǎn)動,給定時器0賦不同的初值對應步進電機不同的轉(zhuǎn)動速度。若四向八拍運行方式A-AB-B-BC-C-CD-D-DA為電機的正轉(zhuǎn),則運行方式DA-D-CD-C-BC-B-AB-A為電機反轉(zhuǎn),每運行完一個八拍相當于電機走一步,設計變量motor_step專門記錄電機的步數(shù),電機正轉(zhuǎn)變量motor_step加,電機反轉(zhuǎn)變量motor_step減。motor_step值乘以電機的步長值即得到步進電機帶動邁克爾干涉儀微調(diào)旋鈕轉(zhuǎn)過的長度。
4 實驗結(jié)果與精度分析
4.1 He-Ne激光波長測量
采用波長為632.8nm的He-Ne激光器作為光源。在一般實驗環(huán)境下,經(jīng)過大量測試,系統(tǒng)均能準確、快速測量出波長長度,表1是系統(tǒng)一次測量的數(shù)據(jù)。
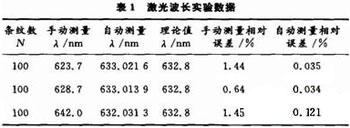
系統(tǒng)自動測量的最終結(jié)果為多次測量的平均值,由表1可以看出,與理論值非常接近,平均誤差為0.06%,遠低于手動測量產(chǎn)生的誤差。
測量誤差主要來源于△d的測量和條紋計數(shù)N。步進電機的步進值為19.53nm,它比微調(diào)旋鈕的最小刻度100nm還要小80.47nm,提高了對△d測量的準確度,因此誤差較小。實驗過程中,空氣擾動、實驗桌的碰撞、外界振動都會產(chǎn)生毛刺信號影響光敏二極管對干涉條紋的檢測,產(chǎn)生計數(shù)錯誤,從而產(chǎn)生測量誤差。對于較小的毛刺信號,通過編程進行處理,不會對條紋計數(shù)產(chǎn)生大的影響,但對于嚴重的干擾信號,系統(tǒng)無法處理。系統(tǒng)會根據(jù)測量的結(jié)果自動判斷實驗誤差是否在允許范圍內(nèi),若不在,將提示重新測量。
4.2 透明薄膜厚度測量
實驗選用標準厚度為80μm的透明薄膜作為測試品,用阿貝折射儀測出此薄膜的折射率n=1.4294,在一般實驗環(huán)境下,對薄膜厚度進行了大量的測量,表2所示為測量的一部分數(shù)據(jù),其中d1為未插薄膜前彩色條紋出現(xiàn)時動鏡的位置,d2為插入薄膜后彩色條紋出現(xiàn)時動鏡的位置。
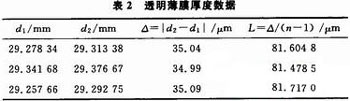
從表2數(shù)據(jù)可以算出,測試薄膜厚度的平均值為81.6001μm,精度較高(測量薄膜厚度精確到了0.1nm級)。測量薄膜厚度的誤差主要來源于兩個方面,△和n的測量。雖然步進電機的步進值較小,但并不能完全消除對△測量的誤差,而是將其大大減小了。薄膜上的灰塵不可避免地影響薄膜的折射率n。實驗過程中,外界的干擾以及儀器本身因素都會影響測量結(jié)果。
5 結(jié)語
基于單片機改造后的邁克爾遜干涉儀可以精確、快速、自動測量激光波長和薄膜厚度。采用非接觸法測量薄膜厚度,不會對薄膜造成破壞,擴展了邁克爾遜干涉儀的使用范圍,提高了實用性。改裝電路元器件價格低廉,組裝簡單,對邁克爾遜干涉儀的手動測量與外觀沒有任何影響,促進了光學教學實驗儀器的發(fā)展,具有一定的市場前景。
本研究在湖北師范學院物理與電子科學學院劉興云老師的指導下,由光學實驗室與電子電工實驗室提供實驗器材,經(jīng)過小組成員的共同努力完成。在此特別感謝劉老師的指導,同時對湖北師范學院物理與電子科學學院和提供過幫助的老師與同學致以深切的謝意與祝福。
作者:彭真真 趙碩浛 劉月林 程匹克 陳程 來源:現(xiàn)代電子技術(shù)