
0 引言
嵌入式技術(shù)在機(jī)器人控制領(lǐng)域應(yīng)用廣泛,它集中了機(jī)械工程、自動化控制以及人工智能等多門學(xué)科的最新科研成果,已經(jīng)成為當(dāng)前科技研究和應(yīng)用的焦點(diǎn)與重心。而機(jī)器人控制系統(tǒng)需要解決的關(guān)鍵問題之一就是電機(jī)控制技術(shù)。本課題基于嵌入式系統(tǒng)處理器ARM&DSP主從控制模式的硬件平臺,利用Linux操作系統(tǒng),對直流電機(jī)的控制進(jìn)行研究,設(shè)計了基于QT的應(yīng)用程序開發(fā),以圖形的方式給用戶提供操作接口,實(shí)現(xiàn)對電機(jī)更加直觀的狀態(tài)顯示和靈活的控制。
1 控制系統(tǒng)的整體設(shè)計
本系統(tǒng)的主控制器由基于32位ARM。
920T的RISC處理器Samsung S3C2440嵌入式開發(fā)板構(gòu)成,內(nèi)部運(yùn)行嵌入式Linux操作系統(tǒng),主要負(fù)責(zé)系統(tǒng)的控制以及與從控制器DSP的通訊等任務(wù),主控制器通過串行通信接口(UART)實(shí)現(xiàn)與從控制器的數(shù)據(jù)通信,包括發(fā)送特定數(shù)據(jù)格式的控制指令和接收DSP控制器返回的傳感器數(shù)據(jù)。利用Linux操作系統(tǒng)搭建平臺并開發(fā)基于QT的圖形界面,通過觸摸屏實(shí)現(xiàn)人機(jī)接口,完成對電機(jī)和傳感器的控制和傳感器數(shù)據(jù)的顯示。從控制器采用32位定點(diǎn)控制器TMS320F2812,主要完成對電機(jī)的控制,以及反饋給主控制器ARM9當(dāng)前的運(yùn)動狀態(tài)。控制系統(tǒng)整體結(jié)構(gòu)設(shè)計框圖如圖1所示。

2 串行通信設(shè)計
本系統(tǒng)中主控制器ARM9與從控制器TMS320F2812之間的通訊采用串行通信接口,即UART口。TMS320F2812的SCI模塊利用中斷進(jìn)行控制,其接收和發(fā)送是雙緩沖的,二者可獨(dú)立地工作于全雙工模式。串口通過兩個可以復(fù)用和具有優(yōu)先級的I/O引腳SCITXD和SCIKXD分別用于發(fā)送和接收數(shù)據(jù),RS-232與DSP中的TTL電平之間需要配驅(qū)動和隔離電路可以組成一個簡單的通信接口。在ARM9和DSP之間采用了符合RS-232標(biāo)準(zhǔn)的驅(qū)動芯片MAX3232進(jìn)行串行通信,MAX3232芯片功耗低、集成度高,具有兩個接收和發(fā)送通道。TMS320F2812串行接口電路如圖2所示。
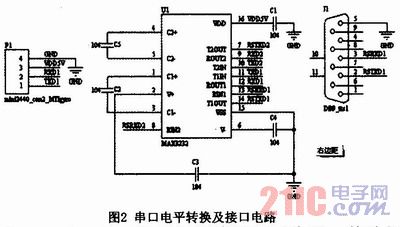
在TMS320F2812的串行通信接口工作時,其功能可以通過軟件可編程實(shí)現(xiàn),當(dāng)接收到數(shù)據(jù)后,通過事件管理器模塊中的通用定時器,PWM單元以及捕獲單元對電機(jī)的方向和速度進(jìn)行控制。
3 QT圖形界面的設(shè)計
3.1 QT/Embedded
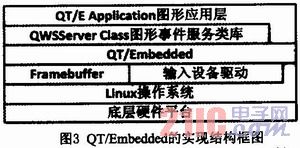
大多數(shù)的嵌入式系統(tǒng)都需要與人進(jìn)行交流,而且形成了軟硬件完全定制開發(fā)的、基于圖形化顯示、觸摸屏控制的人機(jī)接口產(chǎn)品。QT/ Embedded是一個跨平臺應(yīng)用程序和UI開發(fā)框架,支持豐富的圖形控件,提供美觀的界面開發(fā),完全滿足人機(jī)交互產(chǎn)品的界面顯示需求。QT/ Embedded的實(shí)現(xiàn)結(jié)構(gòu)框圖如圖3所示。
QT應(yīng)用程序由C++語言進(jìn)行開發(fā)。QT的API分為控件、框架和工具三個部分,其高效的工作性能與其信號和槽的機(jī)制是密不可分的。QT/ Embedded開發(fā)流程如圖4所示。

在宿主機(jī)上建立QT開發(fā)環(huán)境,安裝交叉編譯工具,包括編譯器、鏈接器、庫函數(shù)等,應(yīng)用程序在宿主機(jī)上運(yùn)行,而產(chǎn)生的目標(biāo)代碼是針對特定的硬件平臺。并且使用QtCreator跨平臺的Qt集成開發(fā)環(huán)境,有助于提高開發(fā)的效率。QT應(yīng)用程序的開發(fā)是在宿主機(jī)上調(diào)試通過后,移植到目標(biāo)板上。
3.2 串口通信界面
串口通信界面提供串口屬性設(shè)置、串口數(shù)據(jù)通信的接口函數(shù)以及DSP反饋給ARM9的電機(jī)狀態(tài)信息。串口通信界面如圖5所示。通過點(diǎn)擊界面中‘Edit Parameter’按鍵實(shí)現(xiàn)對串口各種參數(shù)的配置。正確配置好參數(shù),點(diǎn)擊‘ConneCt’按鍵即可連接串口,準(zhǔn)備通信。電機(jī)狀態(tài)可以點(diǎn)擊‘Receive’獲得。‘Motor’菜單可打開電機(jī)控制界面,其控制也是通過生效的串口傳輸。

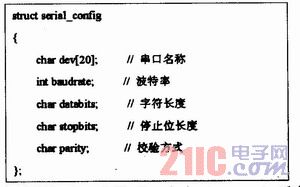
設(shè)計串口配置的界面時,首先定義結(jié)構(gòu)體serial config,具體如下:
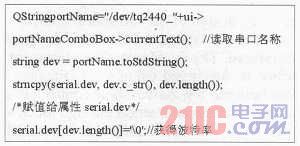
在設(shè)置好串口參數(shù)后,點(diǎn)擊‘Connet’后發(fā)送控件QPushButton信號clicked(),調(diào)用自定義槽函數(shù)setup_serial(),實(shí)現(xiàn)對QT控件中各個參數(shù)的讀取,并根據(jù)參數(shù)配置對應(yīng)的串口。其中,由控件portNameComboBox的成員函數(shù)currentText()獲得設(shè)置的串口號,由此讀取串口名稱,并賦值給屬性serial.dev。設(shè)置串口名稱代碼段如下:
類似地讀取串口通信的其他相應(yīng)參數(shù)。接下來,需要打開串口,代碼段如下:
其中,使用open函數(shù)打開串口,獲得串口設(shè)備文件的文件描述符fd_serial。
槽函數(shù)setup_serial()中,完成參數(shù)讀取并打開串口操作后,通過調(diào)用自定義的子函數(shù)set baudrate(int)用來設(shè)置波特率,而子函數(shù)set Parms(int)則是設(shè)置其他參數(shù)。其中主要使用了針對Linux串口通信的termios數(shù)據(jù)結(jié)構(gòu)對串口進(jìn)行配置。由于使用串口對電機(jī)進(jìn)行讀取或控制,不允許等待,所以對于打開的任何串口,都需要將其設(shè)置為非阻塞工作方式。程序中通過fcntl(fd serial,F(xiàn)_SETFL,O_NONBLOCK)實(shí)現(xiàn)把Linux下默認(rèn)為阻塞讀的緩沖設(shè)置為非阻塞讀。
設(shè)計電機(jī)狀態(tài)讀取部分時,首先定義了結(jié)構(gòu)體motor_status:
當(dāng)電機(jī)處于正常工作狀態(tài)時,點(diǎn)擊界面上‘Receive’,自定義的槽函數(shù)receive data()會響應(yīng),實(shí)現(xiàn)對電機(jī)狀態(tài)的讀取。制定的DSP反饋給ARM9的數(shù)據(jù)包的格式如表1所示,數(shù)據(jù)格式大小為16位的char型數(shù)組。在槽函數(shù)中,使用read(fd_serial,buff16)函數(shù)通過串口讀取這16位帶有電機(jī)狀態(tài)信息的數(shù)據(jù),并賦值給數(shù)組buff[]。
將字符數(shù)組buff[]各個字段傳遞給對應(yīng)motor_status屬性,并分別發(fā)送自定義信號。用于顯示電機(jī)狀態(tài)的控件QLabel是QWidget的子類,其槽函數(shù)setText(QString)接收信號并將其顯示。比如,顯示電機(jī)轉(zhuǎn)速狀態(tài)的過程是:發(fā)射自定義信號speed_changed(QString),觸發(fā)QL-abel類型控件label_DiskSpced_value的槽函數(shù)setText(OString),將當(dāng)前電機(jī)轉(zhuǎn)速顯示在界面上。該信號和槽函數(shù)連接的語句為connect(this,SIGNAL(speed_changed(Qstring)),ui->label DiskSpeed value,SLOT(setText(QString)),實(shí)現(xiàn)了電機(jī)轉(zhuǎn)速的數(shù)據(jù)顯示。
3.3 電機(jī)控制界面
電機(jī)控制界面提供了對電機(jī)控制指令的配置,電機(jī)控制界面如下圖6所示。

點(diǎn)擊‘Edit’鍵可對參數(shù)進(jìn)行編輯,之后點(diǎn)擊‘Send’,通過串口傳輸生效。
先定義了電機(jī)參數(shù)結(jié)構(gòu)motor config:

點(diǎn)擊‘Send’后發(fā)送控件QPushButton的信號clicked(),它會觸發(fā)自定義的槽函數(shù)send_data(),實(shí)現(xiàn)通過串口傳遞給DSP控制指令。定義DSP接收的電機(jī)控制的數(shù)據(jù)格式,如表2所示,需要大小為13位的char型數(shù)組存儲電機(jī)控制信息。槽函數(shù)send_data()中,按照格式賦值給
char型buff[]數(shù)組,然后通過函數(shù)write(fd_serial,buff,sizeof(buff))將數(shù)據(jù)寫入串口。

3.4 實(shí)驗(yàn)結(jié)果
完成QT應(yīng)用程序在PC端的Linux下的仿真運(yùn)行,編譯出在開發(fā)板上執(zhí)行的二進(jìn)制可執(zhí)行文件,最終在嵌入式ARM板上運(yùn)行效果如圖7所示,實(shí)現(xiàn)了ARM與DSP的串行通信及對電機(jī)的監(jiān)控。

4 結(jié)語
基于QT/Embedded的GUI應(yīng)用程序運(yùn)行在嵌入式操作系統(tǒng)Linux上,高效穩(wěn)定,UI設(shè)計提供了良好的用戶體驗(yàn),滿足了嵌入式設(shè)備的界面顯示需求。本課題采用ARM&DSP+Linux+QT/Embedded的技術(shù)方案,設(shè)計與實(shí)現(xiàn)了電機(jī)控制界面,顯示了高性能嵌入式處理器、智能化嵌入式操作系統(tǒng)、圖形化應(yīng)用程序在嵌入式產(chǎn)品應(yīng)用上的可行性。