
影響雷達(dá)測角精度的因素比較多,誤差的產(chǎn)生部位和性質(zhì)也不盡相同。其中,回程誤差是影響測角精度的一個(gè)重要因素。由于天線經(jīng)常工作在零速附近,傳動(dòng)鏈中齒隙的存在會(huì)使得傳動(dòng)產(chǎn)生相應(yīng)滯后,甚至?xí)a(chǎn)生極限環(huán)振蕩,在動(dòng)力傳動(dòng)鏈中,傳統(tǒng)的機(jī)械消隙已經(jīng)無法滿足精度要求,本文提出了雙馬達(dá)驅(qū)動(dòng)電消隙技術(shù),它具有更多優(yōu)越性。
1 回程誤差分析
1.1 回程誤差的概念
如果傳動(dòng)裝置的組成零部件制造、裝配得絕對(duì)準(zhǔn)確,對(duì)使用過程中的溫度變形、彈性交形也予以忽略,則傳動(dòng)過程小,輸出軸轉(zhuǎn)角φo與輸入軸轉(zhuǎn)角φi之間應(yīng)符合下列理想關(guān)系:
![]()
式中,it為傳動(dòng)裝置的總傳動(dòng)比。φo和φi之間成線性比例關(guān)系。
實(shí)際上,組成零部件不可能制造、裝配得絕對(duì)淮確,而在使用過程中還會(huì)存在溫度變形和彈性變形,因此,在傳動(dòng)過程個(gè)輸出軸的轉(zhuǎn)角總會(huì)存在誤差。
回程誤差可以定義為:當(dāng)輸入軸開始反向回轉(zhuǎn)后到輸出軸也跟著反向時(shí),輸出軸在轉(zhuǎn)角上的滯后量,用符號(hào)△R表示。由于回程誤差的存在,反向回轉(zhuǎn)后,輸出軸的φo和輸入軸的φi之間的關(guān)系曲線如圖1所示,它與電工學(xué)中的磁滯回線十分相似。
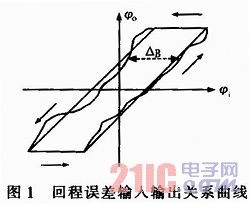
回程誤差也稱為空程誤差,相似含義的名稱還有齒隙、側(cè)隙、空回、死程等。可以作如下設(shè)想:使輸入軸固定不動(dòng),然后在正反兩個(gè)極限位置上旋轉(zhuǎn)輸出軸,這時(shí)輸出軸所具有的游移量即該傳動(dòng)裝置在輸出軸上的回程誤差。也可以使輸出軸固定不動(dòng),然后在正反兩個(gè)極限位置上旋轉(zhuǎn)輸入軸,這時(shí)輸入軸所具有的游移量即該傳動(dòng)裝置在輸入軸上的回程誤差。回程誤差的靜態(tài)測量就是按上述方法來進(jìn)行的。
1.2 回程誤差對(duì)伺服系統(tǒng)性能的影響
傳動(dòng)鏈的回程誤差對(duì)伺服系統(tǒng)性能的影響,按其在系統(tǒng)中所處位置不同而有所不同。
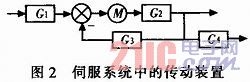
如圖2所示,對(duì)處于閉環(huán)前的傳動(dòng)鏈G1,其回程誤差將影響伺服精度;對(duì)處于閉環(huán)內(nèi)前向通路上的傳動(dòng)鏈G2,其回程誤并不影響伺服精度,但對(duì)穩(wěn)定性有重大的影響;對(duì)處于閉環(huán)內(nèi)反饋回路上的傳動(dòng)鏈G3,其回程誤差對(duì)伺服精度及穩(wěn)定性均有影響;對(duì)處于閉環(huán)后的傳動(dòng)鏈G4,其回程誤差影響數(shù)據(jù)的傳遞精度。
1. 3 回程誤差分析
傳動(dòng)鏈的回差是各個(gè)齒輪副上回差的綜合,而各個(gè)齒輪副上的回差則是每個(gè)齒輪上的回差以及箱體孔中心距誤差的綜合。每個(gè)齒輪上的回差則是齒輪本身、軸、軸承等零部件在制造、裝配時(shí)的誤差綜合。考慮回程誤差因素時(shí)一般折算到節(jié)圓切向上來綜合,即對(duì)切向齒隙進(jìn)行分析和綜合。影響齒輪切向齒隙的因素主要有以下幾個(gè)方面。
1)每個(gè)齒輪輪齒的減薄量及其誤差。為了補(bǔ)償制造、裝配時(shí)的誤差,補(bǔ)償溫度變形、彈性交形,避免輪齒卡死,同時(shí)也為了貯存潤滑劑,改善齒面的摩擦條件,在輪齒的非工作側(cè)面必須保持一定的間隙。
2)軸承的游隙。理想情況下,與齒輪軸配合的軸承內(nèi)環(huán)與箱體孔配合的軸承外環(huán)同心。實(shí)際上嚙合力將使軸的位置沿著嚙合力的方向緊靠外環(huán),當(dāng)反向驅(qū)動(dòng)時(shí),嚙合力又使軸在反向的嚙合力方向上緊靠外環(huán)。齒輪在切向和徑向偏移,將產(chǎn)生一個(gè)小角度的轉(zhuǎn)動(dòng),此角度即為由軸承游隙產(chǎn)生的回差。
3)除了上述因素外,影響齒隙的誤差因素還有齒輪內(nèi)孔與軸的配合間隙、軸的偏心、箱體的孔中心距偏差、軸承的內(nèi)環(huán)偏心、外環(huán)偏心等。
2 減小回程誤差的措施
減小回程誤差、提高傳動(dòng)精度的措施主要可以分成兩方面:結(jié)構(gòu)措施和電路措施。
2.1 結(jié)構(gòu)措施
2.1.1 合理設(shè)計(jì)傳動(dòng)鏈
適當(dāng)?shù)靥岣吡悴考旧淼木龋侠淼卦O(shè)計(jì)傳動(dòng)鏈,可以減少零部件制造、裝配誤差對(duì)回差的影響。
1)合理選擇傳動(dòng)型式。一般來說,圓柱直齒與斜齒齒輪機(jī)構(gòu)的經(jīng)濟(jì)精度較高,蝸桿蝸輪機(jī)構(gòu)次之,圓錐齒輪則更次之。在行星齒輪機(jī)構(gòu)方面,諧波齒輪精度最高,漸開線行星齒輪機(jī)構(gòu)、少齒差行星齒輪機(jī)構(gòu)次之,擺線針輪行星齒輪機(jī)構(gòu)則更次之。
2)合理確定級(jí)數(shù)和分配各級(jí)傳動(dòng)比。減少傳動(dòng)級(jí)數(shù),就可減少零件數(shù)量,也就減少了產(chǎn)生誤差的來源。對(duì)于雷達(dá)減速傳動(dòng)鏈,各級(jí)傳動(dòng)鏈從高速級(jí)開始,逐級(jí)遞增,且在結(jié)構(gòu)空間允許的前提下,盡量提高末級(jí)傳動(dòng)比。采用大的傳動(dòng)比,可使從動(dòng)輪半徑增大,從而提高了角值精度。
3)合理布置傳動(dòng)鏈。在減速傳動(dòng)中,精度較低的傳動(dòng)機(jī)構(gòu)(如圓錐齒輪機(jī)構(gòu)、蝸桿蝸輪機(jī)構(gòu))適宜布置在高速軸上,這樣可減小低速軸上的誤差。
2.1.2 采用消隙機(jī)構(gòu)
消隙機(jī)構(gòu)的型式很多,下面簡單介紹3種。
1)中心距可調(diào)消隙機(jī)構(gòu) 在裝配時(shí)根據(jù)嚙合情況調(diào)整中心距,以達(dá)到減小齒隙的目的。對(duì)于減速輪系,最后一級(jí)的齒輪副對(duì)回差的影響最大,因此將最后一級(jí)齒輪副設(shè)計(jì)成中心距可調(diào),最為有利。
2)彈簧加栽浮動(dòng)齒輪消除機(jī)構(gòu) 這種方法是依靠彈簧加載,使齒與齒緊密嚙合而達(dá)到消除的目的。
3)雙傳動(dòng)鏈彈簧加栽消隙機(jī)構(gòu) 它有兩臺(tái)伺服電機(jī),各自通過一套齒輪箱后驅(qū)功末級(jí)大齒輪。這兩臺(tái)伺服電機(jī)的激磁繞組是串聯(lián)的,以使它們的激磁電流和轉(zhuǎn)矩常數(shù)相同。電機(jī)的后伸軸分別通過一對(duì)錐齒輪與預(yù)載扭簧相連,預(yù)載扭簧給傳動(dòng)系統(tǒng)中的齒輪加了一個(gè)偏置轉(zhuǎn)矩,從而消除了齒隙。
2.2 電路措施
這種消隙方法是用兩個(gè)相同的傳動(dòng)鏈連接兩個(gè)伺服電機(jī)到末級(jí)大齒輪,這兩個(gè)電機(jī)分別加電控制:低負(fù)載力距時(shí),在這兩個(gè)電機(jī)之間建立一個(gè)偏置電壓或偏置電流,從而得到一個(gè)偏置轉(zhuǎn)矩,消除齒隙;而高負(fù)載力矩時(shí),偏置轉(zhuǎn)矩自行取消,負(fù)載力矩由兩個(gè)電機(jī)分擔(dān)。采用雙傳動(dòng)鏈電消隙機(jī)構(gòu)可以顯著減小回程誤差。
3 電消隙設(shè)計(jì)
3.1 力矩偏置電路
在電消隙機(jī)構(gòu)中,兩個(gè)伺服電機(jī)分別由兩套可控硅功率放大器控制。相對(duì)功率放大器來講,假定1#馬達(dá)電樞正接,2#馬達(dá)電樞反接。1#馬達(dá)和2#馬過中的電流都可分為兩部份Id和I偏,Id是馬達(dá)驅(qū)動(dòng)負(fù)載的電流,但必須Id1和Id2方向相反才能驅(qū)動(dòng)負(fù)載運(yùn)動(dòng);I偏是用于電消隙的偏置電流,I偏1和I偏2必須大小相等,方向相同才能產(chǎn)生大小相等方向?qū)數(shù)钠昧亍?/p>
根據(jù)電流指令控制要求設(shè)計(jì)產(chǎn)生偏置電流指令信號(hào)的電路,簡稱為力矩偏置電路。利用兩個(gè)電流環(huán)的負(fù)載電流指令提取Id1和Id2信號(hào),通過偏置電路去控制偏置電流指令的形狀,可以使偏置電路成為一種函數(shù)發(fā)生器,使偏置電流指令成為負(fù)載電流的函數(shù)。
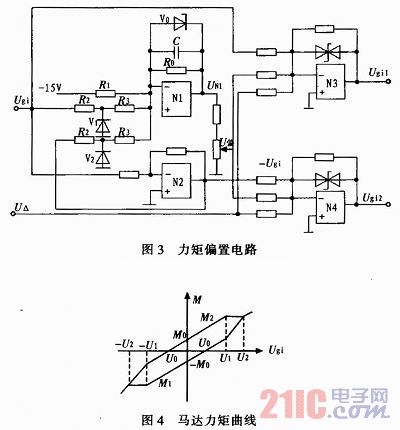
圖3是力矩偏置電路圖,Ugi為速度調(diào)節(jié)器輸出的負(fù)載電流指令,U偏是偏置電流指令,U△是差速振蕩抑制電流指令;N1為梯形函數(shù)發(fā)生器。調(diào)整電位器可以調(diào)整偏置力矩的大小。
3.2 消隙實(shí)現(xiàn)
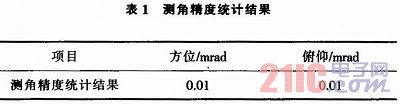
如果不考慮抑制差速振蕩的馬達(dá)力矩,則兩個(gè)馬達(dá)的力矩M1和M2與負(fù)載電流指令的關(guān)系如圖4所示。
圖4中,Ugi為速度調(diào)節(jié)器輸出的負(fù)載電流指令。
當(dāng)Ugi=0時(shí),M2=-M1=M0,M0稱為偏置力矩值。
當(dāng)Ugi由0正向增加不太大時(shí),保持M1、M2反向,仍能消隙,此時(shí)由2#馬達(dá)拖動(dòng)負(fù)載和1#馬達(dá)前進(jìn)。
當(dāng)Ugi正向增加到U0時(shí),M1=0,1#馬達(dá)在齒隙中游移。但2#馬達(dá)仍拖動(dòng)負(fù)載,其齒輪箱不會(huì)出現(xiàn)齒隙,負(fù)載不會(huì)游移。
當(dāng)Ugi>U0時(shí),1#馬達(dá)穿過齒隙與2#馬達(dá)共同推動(dòng)負(fù)載,但M2>M1。
當(dāng)Ugi≥U1時(shí),偏置力矩開始減小。
當(dāng)Ugi≥U2時(shí),偏置力矩完全消隙,兩臺(tái)馬達(dá)以相等的力矩推動(dòng)負(fù)載。
可以看出,在一般工作情況下,負(fù)載至少和一個(gè)馬達(dá)之間無齒隙,不會(huì)游移。但是,當(dāng)力矩快速反向而且其值又比較大時(shí),仍有可能產(chǎn)生兩個(gè)馬達(dá)同時(shí)穿過齒隙的情況,但這種情況在實(shí)際使用時(shí)并不多。
4 結(jié)束語
雙馬達(dá)電消隙系統(tǒng)應(yīng)用于船載雷達(dá),經(jīng)實(shí)踐檢驗(yàn)效果良好。采用雷達(dá)跟蹤信標(biāo)球方式進(jìn)行測角精度統(tǒng)計(jì),其結(jié)果如表1所示。
由上表可以看出,方位和俯仰測角隨機(jī)誤差滿足0.2 mrad的指標(biāo)要求,大大提高了船載雷達(dá)的測量精度。
在精密雷達(dá)天線驅(qū)動(dòng)系統(tǒng)中,雙馬達(dá)或多馬達(dá)驅(qū)動(dòng)除了能實(shí)現(xiàn)電消隙、提高測角精度之外,在傳遞同樣力矩的前提下,雙馬達(dá)驅(qū)動(dòng)比單馬達(dá)驅(qū)動(dòng)所用的齒輪箱體積小,重量輕,易于加工制造;也就是說,在齒輪箱總體積相同的情況下,雙馬達(dá)驅(qū)動(dòng)能提高傳動(dòng)鏈的剛度。