
現(xiàn)有交通信號(hào)控制系統(tǒng)主要分為兩類(lèi):定時(shí)控制和感應(yīng)式控制。定時(shí)控制不能根據(jù)車(chē)輛的流量自適應(yīng)地動(dòng)態(tài)調(diào)節(jié)延時(shí)時(shí)間,可能會(huì)造成車(chē)輛延誤時(shí)間長(zhǎng)及不必要的擁塞等情況:感應(yīng)式控制可以根據(jù)車(chē)流的狀態(tài)采用不同的控制模式,但目前的研究大部分只能單獨(dú)地控制某一點(diǎn),并不能實(shí)時(shí)、多點(diǎn)、聯(lián)測(cè)、聯(lián)動(dòng)的控制。
本文設(shè)計(jì)了一種基于無(wú)線傳感器網(wǎng)的智能交通控制,利用傳感器節(jié)點(diǎn)采集交通信息,智能交通控制終端根據(jù)采集到的交通信息,選擇合適的路口控制模式,調(diào)整各交叉路口的綠信比,協(xié)調(diào)干線各路口周期的確定和各路口之間的相位差,自適應(yīng)地控制車(chē)輛通行時(shí)間,從而保證車(chē)輛通行質(zhì)量,實(shí)現(xiàn)交通信號(hào)控制的智能化、網(wǎng)絡(luò)化。
1 路口控制模式
傳統(tǒng)的路口控制模式是定時(shí)控制,先進(jìn)的路口控制模式有模糊控制、綠波帶模式、夜間模式和急停模式。模糊控制模式是根據(jù)隨機(jī)的車(chē)輛流量智能完成模糊增減交通信號(hào)控制時(shí)間。綠波帶模式在單向車(chē)輛高峰期時(shí),將各個(gè)路口間紅綠燈起始點(diǎn)亮?xí)r間延宕一定量來(lái)保證車(chē)輛一路暢行。夜間控制模式可在夜晚車(chē)輛流量為零負(fù)荷的狀態(tài)使用,僅使用黃燈警示開(kāi)車(chē)司機(jī),減少能源和時(shí)間的消耗。急停模式可為緊急車(chē)輛開(kāi)辟通行空間,在緊急車(chē)輛方向開(kāi)啟綠燈,別的方向開(kāi)啟紅燈。本設(shè)計(jì)提出在不同的時(shí)段采用不同的控制模式,在9:00~11:30,14:30~17:30和20:30~24:00時(shí)段采用模糊控制模式;在5:30~9:00,11:30~14:30和17:30~20:30時(shí)段采用綠波帶模式;在0:00~5:30時(shí)段采用夜間控制模式;在檢測(cè)到緊急車(chē)輛時(shí)采用急停控制模式。具體時(shí)段的設(shè)置可以根據(jù)具體的區(qū)域或車(chē)輛流量,由信號(hào)機(jī)重設(shè)或修改。選擇多種控制模式可以實(shí)現(xiàn)交通控制的合理化,從實(shí)際上緩解交通路口的壓力。
2 智能交通控制設(shè)計(jì)
2.1 基于多Agent的智能交通控制模型
多Agent系統(tǒng)(MAS)一直是人工智能領(lǐng)域的研究熱點(diǎn),MAS具有主動(dòng)性、層次性、動(dòng)態(tài)性和可操作性等優(yōu)點(diǎn)田。在MAS中,協(xié)作不僅能提高單個(gè)Agent以及由多個(gè)Agent所形成系統(tǒng)的整體行為性能,增強(qiáng)Agent與多Agent系統(tǒng)解決問(wèn)題的能力,還能使系統(tǒng)具有更好的靈活性。國(guó)內(nèi)外研究表明。與傳統(tǒng)建模方法(如還原論方法、歸推理方法等)相比,MAS建模可以較好地刻畫(huà)復(fù)雜系統(tǒng)特性。MAS建模主要用于表現(xiàn)復(fù)雜情況(個(gè)體有復(fù)雜的、不同的行為,并存在交互),多Agent復(fù)雜適應(yīng)系統(tǒng)的建模是復(fù)雜系統(tǒng)建模的一種重要方法,多Agent間的交互和協(xié)作是多個(gè)Ag-ent個(gè)體在開(kāi)放、動(dòng)態(tài)環(huán)境下,在資源有限的情況下實(shí)現(xiàn)多個(gè)目標(biāo)的關(guān)鍵。
交通信號(hào)控制系統(tǒng)是一個(gè)典型的復(fù)雜大系統(tǒng),具有時(shí)變、非線性等特點(diǎn),它是由許許多多關(guān)系密切而復(fù)雜的不同領(lǐng)域、不同功能的子系統(tǒng)按不同層次綜合集結(jié)而成的。目前,各種交通子系統(tǒng)接自身的優(yōu)化目標(biāo)運(yùn)作,不考慮與其他系統(tǒng)的集成與協(xié)作,使得交通系統(tǒng)難以達(dá)到最優(yōu)。綜合分析與協(xié)調(diào)各交通子系統(tǒng),是智能交通的發(fā)展趨勢(shì)。本文構(gòu)建了基于多Agent的智能交通控制模型,控制模型如圖1所示。

圖1中,智能交通控制模型中各Agent的功能如下:
1)交通管理Agent幫助建立起其他Agem之間的通訊鏈接,還負(fù)責(zé)系統(tǒng)管理多Agent的增加和刪除等。
2)數(shù)據(jù)管理Agent數(shù)據(jù)采集Agent利用傳感器節(jié)點(diǎn)對(duì)路面的車(chē)輛流量等狀態(tài)向量信息進(jìn)行采集;數(shù)據(jù)處理Agent將收集到的車(chē)輛信息數(shù)據(jù)進(jìn)行計(jì)算處理,計(jì)算出各交叉路口交通控制的各種控制向量;數(shù)據(jù)傳輸Agent向智能交通控制數(shù)據(jù)庫(kù)傳輸數(shù)據(jù),并與其他數(shù)據(jù)源進(jìn)行交流;數(shù)據(jù)備份與恢復(fù)Agent將智能交通控制數(shù)據(jù)庫(kù)中的數(shù)據(jù)進(jìn)行備份和還原。
3)智能交通控制Agent時(shí)刻確定Agent獲取控制時(shí)間段;模式選擇Agent生成路口控制模式;控制方法Agent將控制任務(wù)分解,發(fā)送給綠信比Agent、相位差A(yù)gent、周期Agent、綜合控制Agent,完成單個(gè)控制向量的單獨(dú)控制或多個(gè)控制向量的綜合控制,同時(shí)它還負(fù)責(zé)從綜合控制Agent那里得到最后的控制結(jié)果并輸出給相應(yīng)用戶。綠信比Agent、相位差A(yù)gent、周期Agent是完成控制任務(wù)的主體,進(jìn)行綠信比、相位差和周期控制,然后將結(jié)果送給綜合控制Agent。綜合控制Agent獲取綠信比、相位差和周期控制Agent的輸出結(jié)果并利用綜合控制方法將結(jié)果匯總,匯總得出各交叉路口智能控制值,生成交叉路口智能控制匯總數(shù)據(jù)報(bào)表,并將最終結(jié)果發(fā)送給控制執(zhí)行Agent。控制執(zhí)行Agent對(duì)各交叉路口智能控制結(jié)果進(jìn)行執(zhí)行。
2.2 基于無(wú)線傳感器網(wǎng)的交通信號(hào)控制
無(wú)線傳感網(wǎng)是集計(jì)算機(jī)、通信、網(wǎng)絡(luò)、智能計(jì)算、傳感器、嵌入式系統(tǒng)、微電子等多個(gè)領(lǐng)域交叉綜合的新興學(xué)科,它將大量多種類(lèi)傳感器節(jié)點(diǎn)(傳感、采集、處理、收發(fā)、網(wǎng)絡(luò)于一體)組成自治的無(wú)線網(wǎng)絡(luò),實(shí)現(xiàn)對(duì)物理世界的動(dòng)態(tài)協(xié)同感知。它能實(shí)時(shí)、動(dòng)態(tài)獲得物理世界的傳感信息,并且將相關(guān)信息與通訊主干網(wǎng)融合,實(shí)現(xiàn)了現(xiàn)有的計(jì)算機(jī)網(wǎng)絡(luò)虛擬世界向真實(shí)物理世界的延伸,改變了人類(lèi)和自然界交互的方式。
無(wú)線傳感器網(wǎng)絡(luò)用于構(gòu)建交通信息系統(tǒng)具有以下優(yōu)點(diǎn):1)其無(wú)線自組、泛在協(xié)同的特點(diǎn)使系統(tǒng)布設(shè)和維護(hù)十分方便,可以降低用戶成本,布設(shè)和維護(hù)時(shí)不會(huì)影響車(chē)輛的正常行駛,便于提高交通信息采集系統(tǒng)的可擴(kuò)展性;2)規(guī)模的分布式監(jiān)測(cè)和協(xié)同計(jì)算技術(shù)在能力上優(yōu)于傳統(tǒng)的單點(diǎn)或局部監(jiān)測(cè)技術(shù)。
在交通信號(hào)控制中,需進(jìn)行信息采集、處理、傳輸,控制模式選擇,控制結(jié)果輸出執(zhí)行等操作。傳感器節(jié)點(diǎn)是構(gòu)成無(wú)線傳感器網(wǎng)的基本要素,具有信息采集、信息處理和無(wú)線通信功能,它們既是數(shù)據(jù)包傳輸?shù)陌l(fā)起者,也是數(shù)據(jù)包的轉(zhuǎn)發(fā)者。針對(duì)多路口交通信號(hào)燈控制系統(tǒng),采用三層WSN組織結(jié)構(gòu),第1層為信息采集層,負(fù)責(zé)采集各路口車(chē)輛信息;第2層為控制層,負(fù)責(zé)調(diào)整各交叉路口的綠信比;第3層為協(xié)調(diào)層,負(fù)責(zé)協(xié)調(diào)干線各路口周期的確定和各路口之間的相位差。多路口交通信號(hào)燈控制系統(tǒng)WSN組織結(jié)構(gòu)如圖2所示。
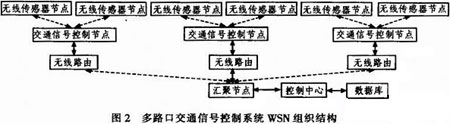
相鄰路段的信息采集節(jié)點(diǎn)組成信息采集層,路口交通信號(hào)燈控制節(jié)點(diǎn)組成控制層。信息采集層和控制層傳感器節(jié)點(diǎn)自組織成簇:交通信號(hào)燈控制節(jié)點(diǎn)作為簇首,信息采集節(jié)點(diǎn)作為簇成員。簇首負(fù)責(zé)采集簇內(nèi)信息采集節(jié)點(diǎn)的數(shù)據(jù),進(jìn)行數(shù)據(jù)融合,并與相鄰簇首節(jié)點(diǎn)進(jìn)行通信;簇成員節(jié)點(diǎn)負(fù)責(zé)路面車(chē)輛信息的采集。從簇首節(jié)點(diǎn)中,選取一個(gè)節(jié)點(diǎn)作為匯聚節(jié)點(diǎn),匯聚節(jié)點(diǎn)與控制中心組成協(xié)調(diào)層。匯聚節(jié)點(diǎn)以多跳的方式與各簇首節(jié)點(diǎn)通信,收集各路口車(chē)流量信息,將數(shù)據(jù)送到控制中心,控制中心進(jìn)行綜合處理,協(xié)調(diào)各路口工作。
信息采集節(jié)點(diǎn)負(fù)責(zé)路面車(chē)流信息的采集,基于RFID技術(shù)進(jìn)行車(chē)輛檢測(cè),在車(chē)輛前擋風(fēng)玻璃上粘貼RFID標(biāo)簽,在交叉路口四個(gè)方向的紅綠燈前50~70 m安裝RFID讀寫(xiě)器,并調(diào)整信號(hào)燈控制器軟件,檢測(cè)交叉路口附近的車(chē)輛流量,采集到車(chē)輛數(shù)據(jù)后,將此數(shù)據(jù)信息以多跳通信的方式傳遞給交通信號(hào)控制節(jié)點(diǎn),經(jīng)數(shù)據(jù)融合后傳遞給匯聚節(jié)點(diǎn);匯聚節(jié)點(diǎn)收集各路口車(chē)流量信息,控制中心根據(jù)設(shè)定的目標(biāo)(如通行量最大、平均候車(chē)時(shí)間最短等)運(yùn)用智能控制方法計(jì)算出最佳方案,并輸出給各路口交通信號(hào)控制節(jié)點(diǎn),控制車(chē)輛的通行與禁止,實(shí)現(xiàn)多路口的協(xié)調(diào)控制。
3 結(jié)論
本文構(gòu)建了基于多Agent的智能交通控制模型,提出了一種基于無(wú)線傳感器網(wǎng)的智能交通控制部署,利用傳感器節(jié)點(diǎn)采集交通信息,交通信號(hào)控制節(jié)點(diǎn)進(jìn)行數(shù)據(jù)融合,并將數(shù)據(jù)傳送給控制中心,控制中心進(jìn)行綜合處理,選擇合適的路口控制模式,調(diào)整各交叉路口的綠信比,協(xié)調(diào)干線各路口周期的確定和各路口之間的相位差,自適應(yīng)地控制車(chē)輛通行時(shí)間,從而保證車(chē)輛通行質(zhì)量,實(shí)現(xiàn)交通信號(hào)控制的智能化、網(wǎng)絡(luò)化。