
引言
最初并沒有適用于混合模式變送器和網(wǎng)絡(luò)應用處理器(NCAP)的數(shù)字通信接口標準。每家變送器制造商都定義有自己的接口。所以,一家變送器廠商的產(chǎn)品不可能支持所有控制網(wǎng)絡(luò)。為解決這一問題,IEEE儀器和測量協(xié)會的傳感器技術(shù)委員會發(fā)起一項倡議,為傳感器、執(zhí)行器、混合模式通信協(xié)議和傳感器電子數(shù)據(jù)表(TEDS)格式創(chuàng)建智能變送器接口標準。這項倡議促成了IEEE 1451.4-2004,已被納入美國國家標準(ANSI)。
該標準的主要目標包括:
實現(xiàn)傳感器的即插即用,通過公共傳感器通信接口實現(xiàn)。
支持并簡化智能變送器的創(chuàng)建。
簡化測量儀器系統(tǒng)的設(shè)置和維護。
以最少的存儲器容量實現(xiàn)智能變送器的部署。
標準闡述了以下內(nèi)容:
變送器,包括混合模式接口(MMI)和變送器電子數(shù)據(jù)表(TEDS)。
MMI,用于存取TEDS。
TEDS,駐留于變送器內(nèi)部的存儲芯片。
說明TEDS數(shù)據(jù)結(jié)構(gòu)的模板。
模板描述語言(TDL)。
稱為變送器模塊的軟件對象,通過TDL訪問TEDS,并對其進行解碼和編碼。
滿足IEEE 1451.4標準的變送器可通過TEDS提供自身說明。本應用筆記討論了用于訪問TEDS的NCAP (數(shù)據(jù)采集系統(tǒng))數(shù)字驅(qū)動器電路。
IEEE 1451.4混合模式接口(MMI)
IEEE 1451.4 MMI用于連接變送器和NCAP或數(shù)據(jù)采集系統(tǒng)(DAS)之間的模擬信號和TEDS。IEEE 1451.4標準定義了兩類MMI。Class 1中,TEDS與模擬功能共用一根線,采用負壓通信。Class 2提供TEDS獨立線對通信,采用正壓通信。因此,按照用筆記4206:“為嵌入式應用選擇合適的1-Wire®主機”一文的說明,Class 2與Maxim的1-Wire驅(qū)動器(主控)相吻合。由于Class 1采用負壓通信,需要更加復雜的驅(qū)動電路。
在Class 1中,有三種MMI版本,分別采用2線、3線或4線與變送器或TEDS通信。這些接口的共性是模擬和數(shù)字功能共用一條線。共用連線可以是信號線、電源線或返回通道。
圖1所示為典型的2線恒流供電傳感器,共用信號線。通過反轉(zhuǎn)信號線的極性,二極管允許順序訪問放大器或TEDS存儲器。當控制開關(guān)處于“analog”位置時,DAS的正電流源通過信號線和上方的二極管為放大器供電。變送器輸出在信號線上表現(xiàn)為模擬電壓。當控制開關(guān)處于“digital”位置時,存儲器件由負邏輯電源通過下方的二極管供電。電路中給出了在TEDS存儲器芯片端子之間的下拉電阻(Rt)。該電阻用于釋放存儲器電路和引線電容的電荷,確保邏輯0電平滿足時隙要求。
 圖1. IEEE 1451.4 Class 1 MMI,共用信號線。
圖1. IEEE 1451.4 Class 1 MMI,共用信號線。
圖2所示為3線電壓供電傳感器的方框圖,共用電源線。信號線專用于將變送器的模擬輸出電壓傳送到DAS。通過反轉(zhuǎn)電源線極性,二極管允許順序訪問放大器或TEDS存儲器。當控制開關(guān)處于“analog”位置時,DAS電源的正電源通過上方的二極管為放大器供電。當控制開關(guān)處于“digital”位置時,存儲器器件由負邏輯電源通過下方的二極管供電。
圖2. IEEE 1451.4 Class 1 MMI,共用電源線。
圖3增加了另一條線,構(gòu)成4線電壓供電傳感器,共用返回線(通常為接地通路)或屏蔽線。傳感器和TEDS存儲器具有獨立的電源,可同時工作。依然需要選擇模擬和數(shù)字模式的開關(guān),以便在使用傳感器時禁用數(shù)字功能。這有助于降低共用回路壓降引起的模擬信號和數(shù)字TEDS數(shù)據(jù)之間的相互干擾噪聲。這種配置下并不需要二極管和Rt。電阻可以省略,二極管可用短路線代替。
圖3. IEEE 1451.4 Class 1 MMI,共用返回線。
TEDS存儲器
DS2430A 256位1-Wire EEPROM是典型的TEDS存儲芯片。由于該芯片沒有VCC引腳(即采用寄生供電),只需要兩個引腳:IO和GND。IEEE標準第8.1.2章的方框圖未提及這些引腳名稱,而是用“+”表示IO,“-”表示GND。圖4所示為IEEE 1451.4兼容傳感器的數(shù)字部分,采用實際型號和引腳名稱。標準(第8.5章,家族碼)未對TEDS存儲器規(guī)定專用的家族碼。因此,允許使用DS2430A之外的2引腳1-Wire存儲器芯片。通用二極管1N4148可用肖特基二極管代替,其正向偏壓大約為0.3V。Rt電阻值不是特別關(guān)鍵,電路采用100kΩ測試。
圖4. Class 1傳感器,TEDS工作原理。
構(gòu)建Class 1 MMI數(shù)字驅(qū)動器電路
1-Wire器件工作信號電平在空閑狀態(tài)為3V至5V (上拉電壓),有效狀態(tài)為0V。該電壓是IO端(正端)與GND端(負端)之間的電壓。Class 1 MMI將IO引腳連接至0V,并調(diào)制存儲器芯片GND引腳的負壓(圖5)。與標稱1-Wire信號電平相比,MMI信號反相,向負向平移5V。
圖5. 標稱1-Wire與Class 1 MMI信號電平
存儲器芯片不能辨別、也不關(guān)心其端子電壓如何產(chǎn)生。應答時,只是在其端口按規(guī)定的時間作用一個短路信號。“常規(guī)狀況”下,這種短路信號在IO口觀測到只是一個接近0V的電壓。對于Class 1 MMI,短路造成數(shù)字通信線上的電壓從-5V (空閑)升高至二極管壓降-VF (-0.7V)。
MMI驅(qū)動器說明
圖6所示為MMI驅(qū)動器電路。電路由正向通路(頂部,主控至傳感器,寫)和返回通路(底部,傳感器至主控,讀)組成。IEEE 1451.4兼容傳感器通過模擬/數(shù)字開關(guān)連接至TP4。返回通路連接至驅(qū)動器的0V (GND)。TP2和TP6處的信號電平對應于標稱1-Wire電平(空閑狀態(tài)為5V,有效信號電平為0V)。V+對應于微控制器的工作電壓,范圍為3V至5V。TP2連接至微控制器的開漏輸出(寫),TP6連接至一個輸入端口。
圖6. 帶有傳感器的Class 1 MMI數(shù)字驅(qū)動器連接雙向1-Wire主控器件
連接雙向主控器件需要圖7所示附加電路。由于電平轉(zhuǎn)換部分的上升和下降沿傳輸延時不同,當工作電壓太高時,采用雙向1-Wire主控器件的MMI驅(qū)動器可能不穩(wěn)定。考慮到這一原因,正電源需要限制在大約3.3V。因此,雙向主控器件必須為3V供電器件,例如DS2482。使用5V雙向主控器件(例如DS2480B),會導致模擬開關(guān)的COM和NO電壓超過V+電平,不符合所要求的工作條件。
圖7. 雙向1-Wire主控器件接口的附加電路
驗證
圖6所示電路采用圖7所示附加電路進行測試。1-Wire主控器件為DS9097U-S09,它基于DS2480B驅(qū)動器芯片。為確保穩(wěn)定,正電壓(V+)設(shè)置為3.4V。1-Wire主控工作在5V,不符合MAX4561模擬開關(guān)的電壓要求(信號電壓不得高于供電電壓)。這解釋了TP2上的干擾,但對電路功能沒有其它不利影響。
復位/在線檢測周期
圖8所示為TP2 (頂部)、TP4 (中間)和TP6 (底部)信號。由于傳感器網(wǎng)絡(luò)中存在二極管,當從器件應答脈沖有效時,不能完全達到0V電平。底部波形顯示了清晰的應答脈沖。TP6處的正向幅值對應于V+ 3.4V。
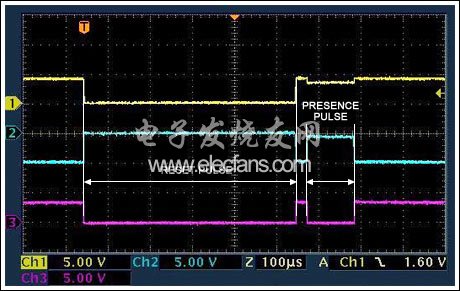
圖8. 復位/在線檢測
讀時隙
圖9所示的節(jié)點與之前相同(TP2 = 頂部,TP4 = 中間,TP6 = 底部)。第一個時隙讀1,第二個時隙讀0。
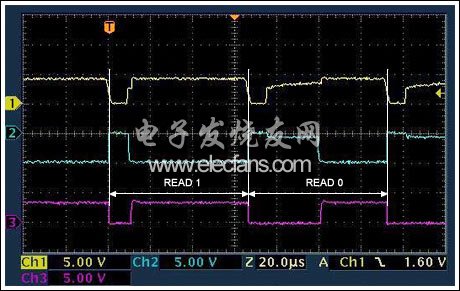
圖9. 通信時隙
總結(jié)
當微控制器作為1-Wire主控,采用獨立的端口進行讀、寫操作時,可以采用本文介紹的電路。但是,產(chǎn)生時隙和復位/在線檢測信號的應用軟件具有嚴格的定時要求,可能必須采用匯編語言編程。利用雙向1-Wire驅(qū)動器芯片的附加電路,允許使用高級語言開發(fā)應用軟件。
由于其異步工作方式,當主控停止拉低1-Wire總線時,附加電路會引起尖峰脈沖。讀0時,尖峰脈沖觸發(fā)驅(qū)動器的有源上拉,造成驅(qū)動器上拉和MAX4561下拉之間的沖突。因此,當使用DS2482驅(qū)動器時,應該關(guān)閉有源上拉。尖峰脈沖也是雙向1-Wire驅(qū)動器附加電路不能支持主控側(cè)1-Wire從器件的原因。