摘 要:本文分析研究了神經(jīng)網(wǎng)絡(luò)的工作原理及其在加熱爐模式識別與智能控制系統(tǒng)中應(yīng)用情況,論述了加熱爐模式識別與智能控制的特點。實踐結(jié)果表明,這種控制思想是可行的,能夠取得滿意的控制效果。
關(guān)鍵詞:神經(jīng)網(wǎng)絡(luò) 模式識別 軋鋼加熱爐 智能控制
一、前 言
近年來,模擬生物神經(jīng)系統(tǒng)的神經(jīng)網(wǎng)絡(luò),由于具有學(xué)習(xí)、自組織等新的信息處理能力,對于模式識別問題有很大的優(yōu)越性,得到了迅速的發(fā)展。在冶金行業(yè)中,軋鋼加熱爐是軋鋼生產(chǎn)過程中的重要設(shè)備之一,在實際操作過程中,操作人員依靠傳感器的信息,判斷爐況,進行操作。有些判斷難以用簡單的“IF A THEN B”這樣的規(guī)則表達,而是根據(jù)操作人員的經(jīng)驗,將爐況分成幾種模式,用神經(jīng)網(wǎng)絡(luò)來識別目前爐況屬于那種模式,對其進行操作進行指導(dǎo),或作為專家系統(tǒng)的補充,有較大的作用。
二、神經(jīng)網(wǎng)絡(luò)模型
神經(jīng)網(wǎng)絡(luò)是模擬生物的神經(jīng)系統(tǒng)(特別是腦)功能的網(wǎng)絡(luò)。人腦約由150億個神經(jīng)細胞組成,每個細胞同數(shù)千、數(shù)萬個神經(jīng)細胞相聯(lián)系,形成網(wǎng)絡(luò)。這樣,神經(jīng)細胞模型可以看作是n輸入單輸出的信息處理單元。某個輸入Xi對神經(jīng)細胞的影響以影響度表示,稱為細胞的結(jié)合權(quán)重或效率Wi,這個細包模型如圖1所示。
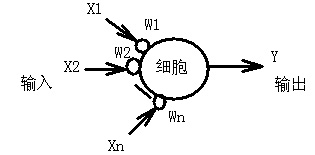 圖1 細胞模型
圖1 細胞模型
細胞的輸入有強有弱,當其總合超過某一閥值,則細胞進入興奮狀態(tài),產(chǎn)生輸出;當其總合低于閾值時,細胞進入抑制狀態(tài),沒有輸出。
神經(jīng)細胞之間可以有不同的連接方式,目前已經(jīng)提出了許多神經(jīng)網(wǎng)絡(luò)模型,在神經(jīng)網(wǎng)絡(luò)中,由于神經(jīng)細胞的計算的并行性,其總體計算效率很高。生物的一個重要特征是有自學(xué)習(xí)功能,改變神經(jīng)網(wǎng)絡(luò)中細胞(或節(jié)點)輸入端的權(quán)重或者細胞興奮的閥值,控制細胞的興奮狀態(tài),可以實現(xiàn)生物系統(tǒng)所具有的靈活的判斷和自學(xué)習(xí)功能。
神經(jīng)網(wǎng)絡(luò)的兩種常用的模型。
2.1 多層感知器模型
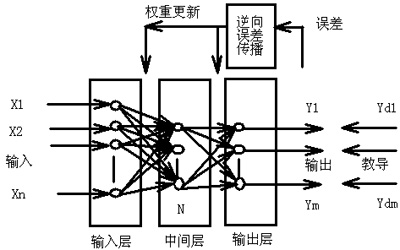 圖2 層次感知器神經(jīng)網(wǎng)絡(luò)
圖2 層次感知器神經(jīng)網(wǎng)絡(luò)
圖2是一個三層感知器神經(jīng)網(wǎng)絡(luò),有N個輸人,M個輸出,一個中間層。從輸入信
號x,由內(nèi)部單元經(jīng)非線性變換,最終得到輸出y。
對于輸入x,期望的輸出設(shè)為yd=yd(x),而實際輸出為y=y(x),一般二者不一致;
輸入—輸出的函數(shù)與網(wǎng)絡(luò)內(nèi)部細胞的結(jié)合權(quán)重有關(guān)。由期望輸出與實際輸出的誤差信號
e = yd(x)-y(x)
調(diào)整網(wǎng)絡(luò)內(nèi)部的結(jié)合權(quán),使誤差減小,以改善神經(jīng)網(wǎng)絡(luò)的工作,這稱為學(xué)習(xí)神經(jīng)網(wǎng)絡(luò)。
在這種場合,因為給定期望的輸出,故稱為有教導(dǎo)的學(xué)習(xí)。
目前逆向誤差傳播學(xué)習(xí)法得到廣泛應(yīng)用,這一學(xué)習(xí)法以輸出的二乘誤差為評價函數(shù),以最速下降法反向修正各層結(jié)合權(quán)和閥值。
這樣,開始時在網(wǎng)絡(luò)上隨機設(shè)置小的權(quán)重和內(nèi)部閥值,重復(fù)輸入訓(xùn)練數(shù)據(jù)進行學(xué)習(xí),每一試驗,根據(jù)指標的誤差信息對權(quán)值和閥值進行調(diào)整,直到指標達到可以接受的值。這一迭代算法步驟如下:
(1) 權(quán)值和閥值的初始值設(shè)定。
(2) 給連續(xù)輸入向量x={x1,x2,…,xn}和期望輸出 yd={yd1,yd2, …,ydM}
(3) 計算實際輸出。
(4) 調(diào)整權(quán)重。
(5) 返回(2),重復(fù)進行。
對于閥值的調(diào)整也可以相似進行。
2.2自組織模型
自組織模型與上述不同的是不規(guī)定期望的輸出,通過自學(xué)習(xí)抽取對象數(shù)據(jù)的特征,進
行基本模式的分類,這稱為無教導(dǎo)的學(xué)習(xí)。
圖3所示M個輸出節(jié)點的陣列,用來抽取輸入特征,輸出節(jié)點用局部連接相連。每一輸入xi通過可變的權(quán)重wij與每一輸出節(jié)點yj相連。反復(fù)送入分類數(shù)據(jù)作為輸入向量x,權(quán)重將進行組織,以輸出最大的節(jié)點為核心,使核的節(jié)點和其鄰近的節(jié)點響應(yīng)相同的輸入信號。通過這種學(xué)習(xí),使各節(jié)點的權(quán)重代表相應(yīng)的輸入模式。與逆向誤差傳播多層神經(jīng)網(wǎng)絡(luò)不同的是:這里是由學(xué)習(xí)自動抽取數(shù)據(jù)的特征,分成典型的模式,而不用給定期望的模式:而分成的典型模式用權(quán)重記憶,找出權(quán)重就掌握了數(shù)據(jù)的特征。圖3為自組織網(wǎng)絡(luò)圖。
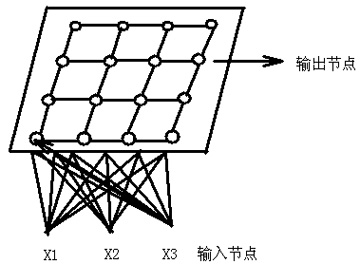 圖3 自組織網(wǎng)絡(luò)圖
圖3 自組織網(wǎng)絡(luò)圖
三 、多層感知器神經(jīng)網(wǎng)絡(luò)在軋鋼加熱爐模式識別中的應(yīng)用
采用多層感知器神經(jīng)網(wǎng)絡(luò)作為軋鋼加熱爐爐溫控制和熱風(fēng)量控制專家系統(tǒng)的一部分。 以軋鋼加熱爐爐溫預(yù)測神經(jīng)網(wǎng)絡(luò)為例,采用如圖4所示的三層網(wǎng)絡(luò)。以鋼坯加熱狀況,煤氣成分,爐中部熱平衡計算求得的計算值指數(shù)、 爐體熱損失量過程數(shù)據(jù)作為輸入層的輸入。
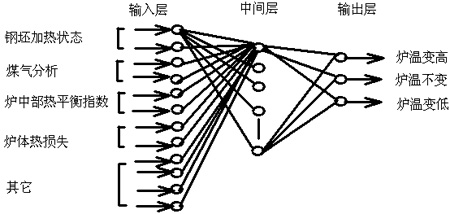 圖4 爐溫預(yù)測神經(jīng)網(wǎng)絡(luò)
圖4 爐溫預(yù)測神經(jīng)網(wǎng)絡(luò)
中間層通過調(diào)整后選用幾個節(jié)點,輸出層有三個節(jié)點,即“爐溫變高”,“爐溫不變”和“爐溫變低”。輸入數(shù)據(jù)經(jīng)歸一化后,為-1~+1之間的值,輸出為0~1范圍的預(yù)測值。學(xué)習(xí)采用逆向誤差傳播學(xué)習(xí)算法,進行權(quán)重調(diào)整以加快收斂。
對于采用多層神經(jīng)網(wǎng)絡(luò)對爐內(nèi)煤氣流分布進行預(yù)測,作為專家系統(tǒng)的一部分。模式識別的對象是爐膛上部檢測器、爐膛中部檢測器和爐壁(縱向)溫度計,檢測器是插入爐內(nèi)的煤氣溫度計或煤氣采樣管。對爐膛上部檢測、爐膛中部檢測、爐壁;(縱向)溫度的模式識別都采用三層神經(jīng)網(wǎng)絡(luò)。預(yù)先根據(jù)過去的操作經(jīng)驗對軋鋼加熱爐爐況進行分類,直觀判斷所檢測的數(shù)據(jù)模式接近那一類,這樣,得到幾種模式作為教導(dǎo)數(shù)據(jù),故神經(jīng)網(wǎng)絡(luò)的輸出層也采用幾個節(jié)點,每個節(jié)點的輸出代表一種模式。
輸入層的節(jié)點數(shù)和中間層的節(jié)點數(shù)也都進行歸類分析經(jīng)過歸一化進行整理得出有效控制模式。
學(xué)習(xí)方法也采用逆向誤差傳播學(xué)習(xí)法進行學(xué)習(xí),并與專家系統(tǒng)結(jié)果進行比較,得出最佳結(jié)果。
神經(jīng)網(wǎng)絡(luò)與專家系統(tǒng)的結(jié)合如圖5所示。神經(jīng)網(wǎng)絡(luò)用C語言編寫程序,起動后,讀入數(shù)據(jù),在幾個煤氣流分布模式中,取最接近的作為判定結(jié)果,送入專家系統(tǒng)。專家系統(tǒng)根據(jù)模式識別的輸出和信息處理的輸出,使用預(yù)先裝入的規(guī)則,經(jīng)過推理機進行推理,預(yù)測軋鋼加熱爐爐況,輸出操作指導(dǎo)。
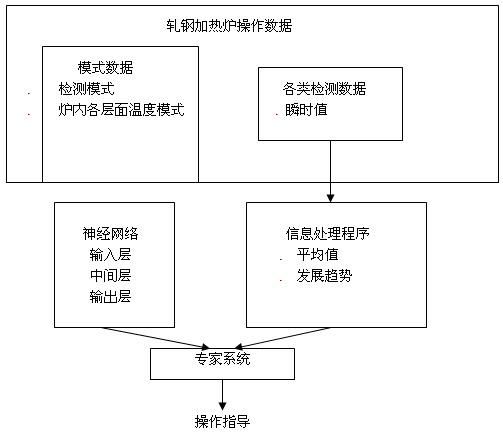 圖5 神經(jīng)網(wǎng)絡(luò)與專家系統(tǒng)的結(jié)合
圖5 神經(jīng)網(wǎng)絡(luò)與專家系統(tǒng)的結(jié)合
四. 自組織神經(jīng)網(wǎng)絡(luò)在軋鋼加熱爐模式識別中的應(yīng)用
以爐膛溫度來說,在爐膛沿上方向和左右方向共設(shè)置一些測溫點,溫度數(shù)據(jù)是二維的分布模式,依靠操作人員觀察對模式進行分類是很困難的,因此不能預(yù)先給出教導(dǎo)模式,而是用自組織網(wǎng)絡(luò)自動抽取數(shù)據(jù)特征,進行分類。
自組織網(wǎng)絡(luò)采用多個輸入節(jié)點,多個輸出陣列,用一段時間的日平均測溫數(shù)據(jù),用自組織網(wǎng)絡(luò)進行分類,得到軋鋼加熱爐高溫、稍高溫、低溫等幾種爐膛溫度模式,模式特征在鄰近節(jié)點間平滑變化。
使用自組織后的網(wǎng)絡(luò),可以用來識別日平均爐膛溫度數(shù)據(jù)與哪一溫度分布模式最為接近,用這一識別可以定量分析與其它爐況數(shù)據(jù)的關(guān)系。
五.自適應(yīng)神經(jīng)網(wǎng)絡(luò)控制器在軋鋼加熱爐過程控制中的應(yīng)用
自適應(yīng)神經(jīng)網(wǎng)絡(luò)控制是根據(jù)對人腦的宏觀結(jié)構(gòu)功能模擬與人腦的控制、決策行為和各種邏輯推理機構(gòu)出發(fā)而設(shè)計的一種控制器,它通過在線、實時學(xué)習(xí),自動獲取知識,并能不斷地提高和完善控制性能。
5.1自適應(yīng)神經(jīng)網(wǎng)絡(luò)控制方式
5.1.1系統(tǒng)工作方式:
神經(jīng)網(wǎng)絡(luò)控制系統(tǒng)將根據(jù)加熱爐工藝條件的不同和各種檢測情況,在其投運以后按下述方式工作.
5.1.1.1 加熱爐學(xué)習(xí)過程
加熱爐學(xué)習(xí)過程是系統(tǒng)觀察爐子的操作,記錄爐內(nèi)各參數(shù)的變化,在線收集各種數(shù)據(jù),建立各種工況模式,建立起各種自適應(yīng)加熱爐模式,在線觀察其工作性能,使其達到操作預(yù)報的功能。
5.1.1.2基礎(chǔ)調(diào)節(jié)及性能監(jiān)視
通過各種常規(guī)PID調(diào)節(jié)算法進行在線實驗,確定其最佳參數(shù),同時構(gòu)造調(diào)節(jié)學(xué)習(xí)網(wǎng)絡(luò),并由其記錄爐子的響應(yīng),評價其控制性能,建立起工況條件與調(diào)節(jié)器工作參數(shù)模式的識別網(wǎng)絡(luò),這個過程形成的性能監(jiān)視器和運行模式識別網(wǎng)絡(luò)具有在線運行能力,即對于工況的變化具有識別和輸出適當結(jié)果的功能。另外,調(diào)節(jié)器學(xué)習(xí)網(wǎng)絡(luò)也在線運行,以比較調(diào)節(jié)器在各種工況下的行為和性能,提供系統(tǒng)報警和修改參數(shù)的依據(jù)。
5.1.1.3自適應(yīng)環(huán)境跟隨
由前兩階段形成的系統(tǒng)模式,經(jīng)過在線確認后,就形成了自適應(yīng)加熱爐控制模式,其主要特征是:隨工況環(huán)境和檢測條件的變化,自動完成這些狀態(tài)變化的識別,作出相應(yīng)的調(diào)節(jié)策略,同時作出各種操作下的狀態(tài)預(yù)報,完成其控制目的。
5.1.2自適應(yīng)神經(jīng)網(wǎng)絡(luò)控制
圖6是采用一個非線性神經(jīng)元作為控制對象的補償器,構(gòu)成自適應(yīng)控制系統(tǒng)。
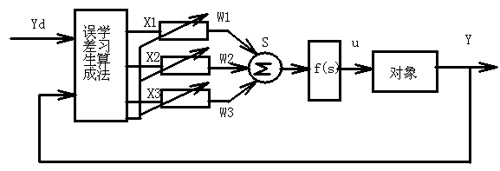 圖6 神經(jīng)網(wǎng)絡(luò)自適應(yīng)控制系統(tǒng)
圖6 神經(jīng)網(wǎng)絡(luò)自適應(yīng)控制系統(tǒng)
取期望輸出Yd與實際輸出之差e作為神經(jīng)網(wǎng)絡(luò)的輸入,采用Hebb學(xué)習(xí)規(guī)則調(diào)整神經(jīng)元的權(quán)值Wj,產(chǎn)生所要求的控制,使系統(tǒng)跟隨期望輸出。
這里取
x1 = yd — y = e(K),x2 = e(K) — e(K—1),x3 = e(K)— 2e(K—1)+ e(K—2)
W1 e(K)+W2[e(K)—e(K—1)]+W3[e(K)—2e(K—1)+ e(K—2)]
可以看出,控制量正好是PID調(diào)節(jié)器的比例、積分、微分作用。可以通過有指導(dǎo)的學(xué)習(xí),對權(quán)值進行訓(xùn)練,訓(xùn)練時,采用下式:
Wj(t+1)= Wj(t)+り[Yd — Y] + a [Wj(t)— Wj(t—1)]
J = 1,2,3
不斷更新權(quán)值。
訓(xùn)練完成后,即可對系統(tǒng)進行PID控制,并可在線修正權(quán)值,進行自適應(yīng)控制。
這樣將軋鋼加熱爐燃燒過程中的各種檢測數(shù)據(jù)作為輸入信號,加熱爐的各種爐況視為輸出信號,通過學(xué)習(xí),可將測量數(shù)據(jù)與爐況之間的各種復(fù)雜的非線性影射關(guān)系用自適應(yīng)網(wǎng)絡(luò)來表示,在加熱爐實際操作時,根據(jù)加熱爐監(jiān)視系統(tǒng)所測到的各種數(shù)據(jù)輸入到計算機,自適應(yīng)網(wǎng)絡(luò)將自動判別加熱爐目前的爐況。同樣,可將爐況和溫度、壓力、流量等各種測量值數(shù)據(jù)作為輸入信號,將各種控制參數(shù)作為輸出信號,自適應(yīng)控制系統(tǒng)將根據(jù)目前的爐況和各種測量數(shù)據(jù),自動控制加熱爐的操作,由于自適應(yīng)控制具有較強的自學(xué)習(xí)能力,將大大地改善加熱爐的判別和控制的可靠性,以及自動化程度。
控制系統(tǒng)的動態(tài)過程是不斷變化的,為了獲得良好的控制性能,控制器必須根據(jù)系統(tǒng)的動態(tài)特性,不斷地改善或調(diào)節(jié)控制決策,以便使控制器本身的控制規(guī)律適應(yīng)于控制系統(tǒng)的需要。
計算機就這樣從數(shù)據(jù)庫中獲取知識,借助于特征狀態(tài)捕捉動態(tài)過程的特征信息,識別系統(tǒng)的動態(tài)行為,作為控制決策的依據(jù),在控制過程中,使用定性知識和推理機構(gòu)對控制對象進行有效的控制。
5.2爐溫產(chǎn)量自協(xié)調(diào)控制
軋制節(jié)奏對爐溫設(shè)定值影響很大,為適應(yīng)不同的軋制節(jié)奏,爐溫的設(shè)定值就必須隨軋制速度進行修正,通過對出爐鋼坯數(shù)的記錄,計算出軋機的 軋制速度,將 軋制速度分為5個檔次:高速軋制,稍高速軋制,中速軋制,低速軋制,停軋。在爐溫設(shè)定值的基礎(chǔ)上,根據(jù)軋機生產(chǎn)的節(jié)奏快慢,自動上下浮動一定的溫度值來控制,生產(chǎn)故障時,自動調(diào)整溫度值來控制加熱爐的燃燒過程,以達到節(jié)能降耗的目的。
六、結(jié) 語
實踐結(jié)果表明,利用神經(jīng)網(wǎng)絡(luò),對難以實現(xiàn)自動化的軋鋼加熱爐的分布數(shù)據(jù)模式可以進行自動識別,用于支持軋鋼加熱爐操作的專家系統(tǒng),以增強軋鋼加熱爐操作管理系統(tǒng)的功能。
操作人員可以根據(jù)經(jīng)驗?zāi)艹槿?shù)據(jù)特征,形成教導(dǎo)用模式分類,用層次神經(jīng)網(wǎng)絡(luò),采用自學(xué)習(xí)算法識別輸入數(shù)據(jù)的模式,在操作人員難以根據(jù)直觀判斷抽取數(shù)據(jù)特征形成模式分類時,采用自組織神經(jīng)網(wǎng)絡(luò),自動抽取數(shù)據(jù)特征,形成模式識別的分類。
根據(jù)前面模式識別所得出的軋鋼加熱爐各種特征數(shù)據(jù),我們就可以對加熱爐進行自適應(yīng)神經(jīng)網(wǎng)絡(luò)控制。
這里分析研究了神經(jīng)網(wǎng)絡(luò)在軋鋼加熱爐模式識別和智能控制中的應(yīng)用情況,從這些應(yīng)用中可以看出神經(jīng)網(wǎng)絡(luò)的優(yōu)異牲能,可以預(yù)見,神經(jīng)網(wǎng)絡(luò)在冶金工業(yè)自動化系統(tǒng)中將會得到越來越多的應(yīng)用,具有廣闊的應(yīng)用前景。
參考文獻
1. 張立明.《人工神經(jīng)網(wǎng)絡(luò)的模型及其應(yīng)用》,上海:復(fù)旦大學(xué)出版社,1993.
2. 方康玲,《過程控制系統(tǒng)》,武漢:武漢理工大學(xué)出版社,2002
3.王順晃等,《智能控制系統(tǒng)及應(yīng)用》,北京,機械工業(yè)出版社,1995
4.王耀南等,《實時專家智能控制系統(tǒng)REICS設(shè)計應(yīng)用》,計算技術(shù)與自動化技術(shù),1995
