
摘 要: 利用數(shù)字圖象處理技術(shù)研究開發(fā)汽車牌照自動(dòng)識(shí)別系統(tǒng)。從汽車圖象中確定車牌位置,提取車牌字符的微結(jié)構(gòu)特征,通過與所建的專用字典庫中的字符標(biāo)準(zhǔn)模板匹配比較,獲得車牌號(hào)碼。試驗(yàn)結(jié)果表明該方案是有效的。
關(guān)鍵詞: 數(shù)字圖象處理 字符識(shí)別 車牌識(shí)別 分類匹配
車牌自動(dòng)識(shí)別系統(tǒng)能將輸入的汽車圖象通過處理識(shí)別,輸出為幾個(gè)字節(jié)大小的車牌字符串,無論在存儲(chǔ)空間的占用上還是與管理數(shù)據(jù)庫相連方面都有無可比擬的優(yōu)越性。在大型停車場(chǎng),交通部門的違章監(jiān)測(cè)(電子警察)、高速公路及橋梁的收費(fèi)站管理等方面,有著廣泛的應(yīng)用前景。
1 車牌定位及預(yù)處理
將汽車圖象文件以Raw格式文件輸入計(jì)算機(jī)后,計(jì)算機(jī)將車牌部分從整幅圖象中抽取出來,實(shí)現(xiàn)車牌定位。設(shè)定門限值為127,設(shè)定檢測(cè)閾值為16。然后對(duì)圖象自上而下逐行掃描,若某一行的0→1和1→0變化次數(shù)大于該閾值則假設(shè)其為待測(cè)車牌最低點(diǎn),繼續(xù)逐行掃描直至0→1和1→0變化次數(shù)小于8的情況出現(xiàn)。將該值假設(shè)為待測(cè)車牌最高點(diǎn)。若最高點(diǎn)與最低點(diǎn)之差大于15則認(rèn)為目標(biāo)已檢測(cè)到,否則繼續(xù)進(jìn)行掃描。如果未檢測(cè)到符合上述條件的目標(biāo),則自動(dòng)調(diào)整門限值重復(fù)以上的操作。直到找到目標(biāo)為止。
利用二值圖象在豎直方向上的投影作為特征,從左至右尋找目標(biāo)的中心點(diǎn)坐標(biāo)。考察以前所得的目標(biāo)高度作為邊長(zhǎng)的方形窗口內(nèi)的豎直方向投影之和(即所包含的象素值為1的象素點(diǎn)的個(gè)數(shù)),若該值小于經(jīng)驗(yàn)閾值(經(jīng)多次試驗(yàn)該閾值取為150)則視為無文字信息的背景部分,若該值首次大于閾值則視為待識(shí)車牌的左邊界部分;之后,若當(dāng)投影和首次由大變小時(shí)跳出循環(huán),則取該窗口的中點(diǎn)橫坐標(biāo)為目標(biāo)中心點(diǎn)。以目標(biāo)中心點(diǎn)為基準(zhǔn)向右,以高度為所得目標(biāo)高度、寬度為30的窗口再次統(tǒng)計(jì)象素值為1的象素點(diǎn)個(gè)數(shù),若該值首次小于經(jīng)驗(yàn)閾值16則視為已到目標(biāo)右邊界,并取該點(diǎn)坐標(biāo)為目標(biāo)最右點(diǎn)的坐標(biāo)。對(duì)目標(biāo)最左點(diǎn)坐標(biāo)的確定同理可得。
由于車牌的高寬比固定,將之作為一種目標(biāo)評(píng)定標(biāo)準(zhǔn),考慮變形因素,若高寬比不處于區(qū)間(0.2~0.6)之內(nèi)則視為無效目標(biāo),修正門限值后開始循環(huán),最終達(dá)到邊界。
目標(biāo)圖象預(yù)處理包括圖象平滑、字符與背景的分離、范圍調(diào)整和傾斜修正等。
根據(jù)實(shí)際情況,圖象的平滑采用八鄰域平均法。所用的掩模為:
實(shí)現(xiàn)字符與背景分離所采用的門限化算法是:在有256個(gè)元素的一維整型數(shù)數(shù)組元素A[i]中存放目標(biāo)圖象中所有灰度值為i的象素點(diǎn)個(gè)數(shù)。比較得到在目標(biāo)圖象中具有最大概率的灰度值a 。研究發(fā)現(xiàn)有以下兩種不同的情況,分別如圖1和圖2所示。
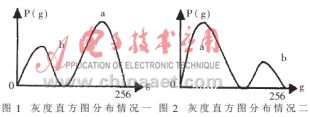
對(duì)情況一,圖象信息主要位于灰度區(qū)間(0~a)之間,此時(shí)再找出灰度區(qū)間(0~b),使該區(qū)間內(nèi)象素點(diǎn)個(gè)數(shù)占目標(biāo)圖象總象素點(diǎn)個(gè)數(shù)的30%。取b為門限值,使灰度值大于該門限值的象素點(diǎn)取值為0,其他情況的象素點(diǎn)取值為1。對(duì)情況二同理處理。從左至右用與目標(biāo)圖象等高且寬度為30的檢測(cè)窗口掃描目標(biāo)圖象。考察其象素密度,當(dāng)值為1的象素點(diǎn)個(gè)數(shù)小于50%時(shí)停止掃描。取此時(shí)檢測(cè)窗口的左坐標(biāo)為目標(biāo)的左邊界。目標(biāo)的右邊界同理可得。根據(jù)所得車牌圖象的范圍信息,在有必要的情況下,用旋轉(zhuǎn)變換進(jìn)行傾斜修正。
2 自動(dòng)單字符列切分
列切分是把定位后提取出的牌照?qǐng)D象,切分成單個(gè)的字符圖象。字符塊在垂直方向上的投影必然在正確的分割位置上(即字符或字符內(nèi)的間隙處)取得了局部最小值,且這個(gè)位置應(yīng)該滿足書寫規(guī)則和字符尺寸限制。對(duì)字符圖象進(jìn)行垂直方向的投影。在水平方向上從左至右檢測(cè)各坐標(biāo)的投影數(shù)值。檢測(cè)到第一個(gè)投影值不為0的坐標(biāo)可視為首字符的左邊界,從該坐標(biāo)向右檢測(cè)到的第一個(gè)投影值為0的坐標(biāo)可視為首字符的右邊界,其余字符的邊界坐標(biāo)同理可得。
通過字符的平均字寬和兩字符左邊界之間的平均距離去除可能存在的誤分。對(duì)于字寬小于平均字寬一定比例(如0.2)的字符視為無效字符;前后兩字符距離小于平均距離且此距離與字寬之和不大于平均距離,則合并之為一個(gè)字符;對(duì)于字寬大于平均字寬一定比例(如2.4)則視為兩字符出現(xiàn)粘連。
經(jīng)過上述處理可以得到準(zhǔn)確的切分結(jié)果。將字符變換到64×64的點(diǎn)陣空間上,以方便進(jìn)行后續(xù)特征抽取等階段的處理。
3 輪廓化與細(xì)化
輪廓化處理采用四鄰域法,對(duì)噪聲平滑后的64×64的文字圖象f(i,j),掃描黑象素點(diǎn)(i,j)的上、下、左、右四個(gè)鄰點(diǎn),只要有一點(diǎn)不為黑,則點(diǎn)(i,j)為字符輪廓上的點(diǎn),置其灰度為1(即黑色),其他情況均令點(diǎn)(i,j)的灰度為0(即白色)。細(xì)化處理采用二次掃描細(xì)化法,該方法的速度較快,但由于是一種較為簡(jiǎn)單的迭代算法,有時(shí)會(huì)造成一定程度的骨架形變。
圖3(b)和圖3(c)分別給出輪廓化和細(xì)化處理后的結(jié)果。

4 微結(jié)構(gòu)特征的提取
把字符分割成n×n的網(wǎng)絡(luò),對(duì)每個(gè)小網(wǎng)絡(luò)統(tǒng)計(jì)出區(qū)域筆劃的方向特征。每個(gè)小區(qū)域突出字符的局部特征,且對(duì)微小的偏移或變形不敏感。把相鄰三點(diǎn)形成的兩條線素定義為微結(jié)構(gòu)。輪廓化后的字符,其中有十二種邊界線素的情況和字符筆劃相關(guān)(如圖4所示)。

根據(jù)字符筆劃的四個(gè)基本方向,可以相應(yīng)定義水平、垂直、±45°四種線素方向。并可以統(tǒng)計(jì)出區(qū)域筆劃方向密度向量。
把64×64的待識(shí)字符劃分為5×5的網(wǎng)格,前4×4的網(wǎng)格大小為13×13,最后一行、一列網(wǎng)格除最后一個(gè)為12×12外,最后一行為12×13,最后一列為13×12,統(tǒng)計(jì)其筆劃方向特征矢量,這樣就在每個(gè)區(qū)域上得到一個(gè)水平、垂直、+45°、-45°的四維方向特征,組成了整個(gè)字符的100維分類特征。
所抽取特征的穩(wěn)定性對(duì)識(shí)別的正確率至關(guān)重要,故在細(xì)分類中對(duì)字符進(jìn)行8×8和7×7的二重分割。分別統(tǒng)計(jì)這64+49=113個(gè)小區(qū)域的區(qū)域筆劃方向向量(共有四個(gè)方向),組成113×4=452維的細(xì)分類特征。采用8×8的分割是為了在更小的區(qū)域內(nèi)抽取更精細(xì)的結(jié)構(gòu)特征。為了防止分割邊緣的不穩(wěn)定,進(jìn)行了7×7的二重分割,使原來最不穩(wěn)定的8×8網(wǎng)格邊緣的筆劃處于7×7網(wǎng)格的中央最穩(wěn)定區(qū)域,提高了區(qū)域邊緣筆劃的穩(wěn)定性。
5 匹配策略
為了提高識(shí)別的準(zhǔn)確和速度,在匹配中采用多級(jí)分類的識(shí)別方案。
粗分類中,采用單純的區(qū)域筆劃方向特征,把字符分成5×5的網(wǎng)格(共25個(gè)小區(qū)域)分別統(tǒng)計(jì)線素的四個(gè)方向特性,構(gòu)成100維(25×4)的特征向量。采用絕對(duì)值距離判別準(zhǔn)則。設(shè)字典庫中的任一特征向量為Pji=(pj1,pj2,pj3,pj4,Λ,pj100),待識(shí)字符的特征向量為h=(h1,h2,h3,h4,Λ,h100),字典中的任意一個(gè)模板與待識(shí)字符之間的距離為dj。
在dj中選取值最小的前10個(gè)字符作為初步匹配的結(jié)果,進(jìn)入下一步進(jìn)行細(xì)分類。
在細(xì)分類中,對(duì)候選字符通過二重分割提取452維的特征矢量作為細(xì)分類的特征。用與粗分類類似的判別準(zhǔn)則進(jìn)行第二次匹配。通過試驗(yàn)確定參數(shù),用不同的權(quán)值系數(shù)與粗分類準(zhǔn)則結(jié)合起來決定待識(shí)字符與不同標(biāo)準(zhǔn)模板的匹配程度,取前四個(gè)作為最終結(jié)果并將其輸出到指定的文本文件之中。
6 標(biāo)準(zhǔn)字典庫的建立
字庫是在眾多字庫中擇優(yōu)選取的。其中漢字從宋體字庫中選取,字母及數(shù)字從OCR-A字庫中選取。對(duì)標(biāo)準(zhǔn)字符分別進(jìn)行歸一化、輪廓化和特征抽取,標(biāo)準(zhǔn)模板就是從中抽取特征得到的特征向量。
7 試驗(yàn)結(jié)果
車牌定位非常理想;字符分割無誤;對(duì)漢字首字符的識(shí)別有時(shí)會(huì)出現(xiàn)誤識(shí)(可見漢字的識(shí)別難度較大,匹配算法和模板庫的建立方面是問題的關(guān)鍵所在);對(duì)字母及數(shù)字的識(shí)別較好;在細(xì)分類優(yōu)先級(jí)的前兩級(jí)達(dá)到100%。
參考文獻(xiàn)
1 薛景浩,章毓晉,林行剛.兩種改進(jìn)的圖象模糊散度閾值化分割法.第九屆全國圖象形學(xué)術(shù)會(huì)議論文集,1998 年5月
2 Richard G. Casey and Eric Lecolinet.A Survey of Methods and Strategies in Character Segmentation.IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MA-CHINE INTELLIGENCE1996;18(2)