
1 引言
據(jù)測試,在太陽能電池板陣列中,相同條件下采用自動跟蹤系統(tǒng)發(fā)電設(shè)備要比固定發(fā)電設(shè)備的發(fā)電量提高35%左右。
所謂太陽能跟蹤系統(tǒng)是能讓太陽能電池板隨時正對太陽,讓太陽光的光線隨時垂直照射太陽能電池板的動力裝置,能顯著提高太陽能光伏組件的發(fā)電效率。目前市場上所使用的跟蹤系統(tǒng)按照驅(qū)動裝置分為單軸太陽能自動跟蹤系統(tǒng)和雙軸太陽能自動跟蹤系統(tǒng)。
從制手段上系統(tǒng)可分為傳感器跟蹤和視日運動軌跡跟蹤(程序跟蹤)。傳感器跟蹤是利用光電傳感器檢測太陽光線是否偏離電池板法線,當(dāng)太陽光線偏離電池板法線時,傳感器發(fā)出偏差信號,經(jīng)放大運算后控制執(zhí)行機構(gòu),使跟蹤裝置從新對準(zhǔn)太陽。這種跟蹤裝置,靈敏度高,但是遇到長時間烏云遮日則會影響運行。視日運動軌跡跟蹤,是根據(jù)太陽的實際運行軌跡,按照預(yù)定的程序調(diào)整跟蹤裝置。這種跟蹤方式能夠全天候?qū)崟r跟蹤,其精度不是很高,但是符合運行情況,應(yīng)用較廣泛。
從主控單元類型上可以分為PLC控制和單片機控制。單片機控制程序在出廠時由專業(yè)人員編寫開發(fā),一般設(shè)備廠家不易再次進行開發(fā)和參數(shù)設(shè)定。而學(xué)習(xí)使用PLC比較容易,通過PLC廠家技術(shù)人員的培訓(xùn),設(shè)備使用廠家的技術(shù)人員可以很方便的學(xué)會簡單的調(diào)試和編寫,并且PLC能夠提供多種通訊接口,通訊組網(wǎng)也比較方便簡單。

2 系統(tǒng)硬件設(shè)計
本系統(tǒng)是以PLC主控單元的視日運動軌跡控制(程序控制)雙軸自動跟蹤系統(tǒng),視日運動軌跡跟蹤就是利用PLC控制單元相應(yīng)的公式和算法,計算出太陽的實時位置:太陽方位角和太陽高度角,然后發(fā)出指令給執(zhí)行機構(gòu),從而驅(qū)動太陽能跟蹤裝,以達到對太陽實時跟蹤的目的。

太陽在天空中的位置可以由太陽高度角和太陽方位角來確定。太陽高度角又稱太陽高度、太陽俯仰角,是指太陽光線與地表水平面得之間的夾角。太陽方位角即太陽所在的方位,是指太陽光線在地平面上的投影與當(dāng)?shù)刈游缇€的夾角,可以近似看作是樹立在地面上的直線在陽光下的陰影與正南方向的夾角。太陽方位角和高度角的實時數(shù)值可以通過地理經(jīng)緯度、時區(qū)參數(shù)利用公式計算出來。
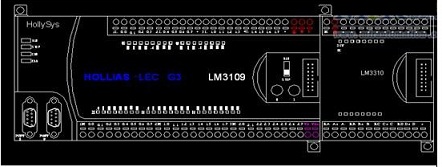
主控單元是太陽能跟蹤系統(tǒng)的核心部件,系統(tǒng)選用結(jié)構(gòu)緊湊。配置靈活、指令豐富的和利時LM PLC。選用的配置包括LM 3108CPU模塊和LM 3310擴展模塊。LM3108集成為數(shù)字量24DI和16DO,能滿足要求,通訊集成有RS232和RS485兩個通訊接口,RS232用于與上位文本顯示器通訊,RS485可用于組網(wǎng)使用。LM 3310為四通AI模塊,可用于采集風(fēng)速等保護數(shù)據(jù)。配合和利時HD2400L文本顯示器使用,能夠監(jiān)視運行狀態(tài)、改變參數(shù)設(shè)置,以達到控制目的。
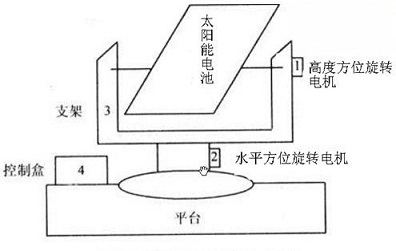
本文所設(shè)計跟蹤調(diào)整裝置其結(jié)構(gòu)如下圖所示:它主要由底座、立軸、橫軸、兩臺旋轉(zhuǎn)電機、傳動齒輪等組成。其中旋轉(zhuǎn)電機1驅(qū)動橫軸,支撐太陽能電池板繞橫軸運動,跟蹤高度角運行。旋轉(zhuǎn)電機2驅(qū)動水平軸,以跟蹤方位角變化。
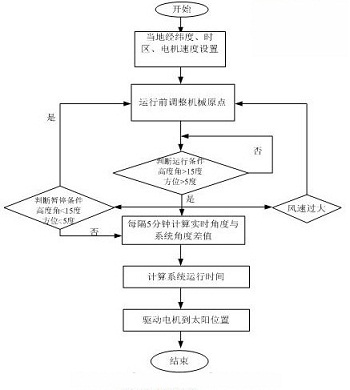
在一天的整個過程中,跟蹤器能夠獲得最優(yōu)的高度角和方位角,電池板能夠接收到最大太陽日輻射量。系統(tǒng)用一套公式由PLC計算出實際時刻太陽所在的高度角和方位角,根據(jù)實時太陽高度角和方位角與跟蹤裝置實際的高度角和方位角的差值,以及驅(qū)動裝置的運轉(zhuǎn)速度,計算出執(zhí)行機構(gòu)的跟蹤運行時間。最后通過程序執(zhí)行驅(qū)動電機達到要求的位置,實現(xiàn)對高度角和方位角的跟蹤。
3 系統(tǒng)軟件設(shè)計
跟蹤模式的判斷過程完全由軟件實現(xiàn),靈活度高,可以針對不同地區(qū)和不同的氣候進行調(diào)整,從而提高光伏電站的發(fā)電效率。還可以根據(jù)需要增加光強傳感器、風(fēng)力傳感器等多傳感裝置,提高安全性和更高的控制要。
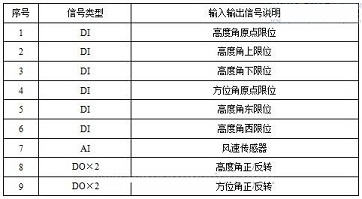
通過程序控制,可以自動判斷是否滿足運行條件從而達到自動啟動運行裝置、自動停止、返回初始狀態(tài)等控制。增加風(fēng)力傳感器用于對系統(tǒng)的保護作用,當(dāng)風(fēng)力大于一定數(shù)值時,系統(tǒng)停止工作,復(fù)位到原點,風(fēng)速滿足工作條件時,系統(tǒng)自動開始工作。太陽能電池板有兩個自由度,控制機構(gòu)對高度角和方位角兩個方向進行調(diào)整。當(dāng)電池板轉(zhuǎn)到盡頭時,由于跟蹤裝置裝了限位傳感器,到限位觸點時自動切斷輸出,電機停止工作。
4 結(jié)論
該自動跟蹤系統(tǒng)的準(zhǔn)確性高、可靠性強,即使在天氣變化比較復(fù)雜的情況下系統(tǒng)也能正常工作,提高太陽能的利用效率。因為PLC具有很強的可編程性,客戶可以根據(jù)自己的要求來修改編寫控制程序,達到最佳的控制效果。對于串、并聯(lián)的大型光伏太陽能陣列系統(tǒng)的控制,可以通過LM PLC的通訊,組成通訊網(wǎng)絡(luò)進行集中控制。