[摘 要]:本文以DSP為信息處理單元,將電子天平與紅外干燥箱融為一體,設(shè)計(jì)了一種水分測(cè)定電子天平。這種儀器具有水分測(cè)定與質(zhì)量稱量?jī)煞N計(jì)量功能。采用時(shí)間最優(yōu)控制與PID控制相結(jié)合的控制策略來(lái)對(duì)烘箱的溫度進(jìn)行實(shí)時(shí)控制,既可以發(fā)揮時(shí)間最優(yōu)控制快速消除大偏差的優(yōu)點(diǎn),又能發(fā)揮PID控制精度高、超調(diào)小的優(yōu)點(diǎn),從而使靜態(tài)、動(dòng)態(tài)性能指標(biāo)較為理想,同時(shí)又達(dá)到了準(zhǔn)確、快速測(cè)定的目的。
水分是決定產(chǎn)品質(zhì)量和工藝的基本參數(shù),水分含的準(zhǔn)確測(cè)定是產(chǎn)品質(zhì)量的重要保證。目前諸多行業(yè)水分測(cè)定標(biāo)準(zhǔn)方法(仲裁依據(jù))是烘干失重法,即將重量為W1,的試樣按規(guī)定時(shí)間和溫度烘干,烘干后失重設(shè)為W∞,則含水率為:  該方法直接測(cè)出水分蒸發(fā)量,稱直接法,又稱經(jīng)典法。該方法需要使用分析天平和電烘箱,操作繁瑣,而且由于電烘箱的溫度波動(dòng)較大,容易損壞樣品。
該方法直接測(cè)出水分蒸發(fā)量,稱直接法,又稱經(jīng)典法。該方法需要使用分析天平和電烘箱,操作繁瑣,而且由于電烘箱的溫度波動(dòng)較大,容易損壞樣品。
本文以DSP為信息處理單元,將電子天平與紅外干燥箱融為一體,并將時(shí)間最優(yōu)控制和PID控制相結(jié)合,設(shè)計(jì)了一種基于DSP的新型水分測(cè)定電子天平,采用時(shí)間最優(yōu)控制和PID控制相結(jié)合的控制策略對(duì)烘箱溫度進(jìn)行實(shí)時(shí)控制,這樣既可發(fā)揮時(shí)間最優(yōu)控制快速消除大偏差的優(yōu)點(diǎn),又能發(fā)揮PID控制精度高、超調(diào)小的優(yōu)點(diǎn)。
1 測(cè)試機(jī)理與結(jié)構(gòu)設(shè)計(jì)
本文采用TMS320LF2407A的DSP作為信息處理單元,設(shè)計(jì)了一種基于DSP的新型水分測(cè)定電子天平,如圖1所示。 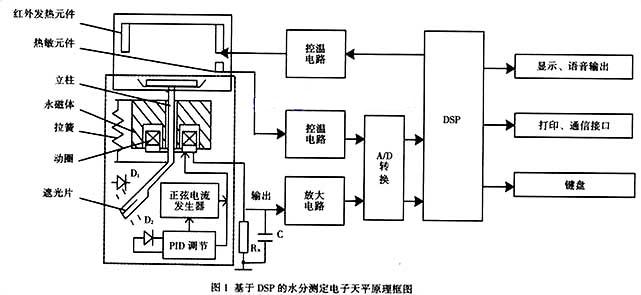
電磁力平衡傳感器將被測(cè)質(zhì)量轉(zhuǎn)換成電信號(hào)輸出至放大電路,變成0~5V直流電壓信號(hào),經(jīng)A/D轉(zhuǎn)換送DSP處理,顯示、打印或語(yǔ)音輸出測(cè)量結(jié)果。
紅外干燥箱內(nèi)的熱敏元件通過(guò)測(cè)溫電路和A/D轉(zhuǎn)換隨時(shí)向DSP提供溫度測(cè)量信息。DSP根據(jù)鍵盤(pán)設(shè)定溫度和烘箱內(nèi)實(shí)測(cè)溫度進(jìn)行PWM控制,通過(guò)可控硅調(diào)功電路實(shí)現(xiàn)。
1.1紅外輻射干燥機(jī)理
紅外輻射烘干法的干燥機(jī)理仍基于經(jīng)典法,用電阻式烘箱,試樣中水分的蒸發(fā)主要靠熱傳導(dǎo),失水速度慢,測(cè)量效率低。而紅外法、微波法的加熱方式可直接從物質(zhì)內(nèi)部加熱,大大縮短了烘干時(shí)間,而且還具有清潔、無(wú)附件、安裝方便等優(yōu)點(diǎn),因此在烘干加熱領(lǐng)域得到了廣泛的應(yīng)用。
由于微波加熱方式一般功率較大,難以控制,而且可能導(dǎo)致輻射泄漏,因此本文設(shè)計(jì)的新型水分快速測(cè)定電子天平采用了紅外輻射加熱方式加速樣品烘干。
1.2質(zhì)量稱量原理
水分測(cè)定電子天平質(zhì)量稱量范圍為0~300g,感量為0.001g。稱重前,杠桿平衡,遮光板處于零位,加待稱重物后,杠桿失去平衡,帶動(dòng)遮光板偏離零位,零位檢測(cè)差分光電二極管輸出的差分電壓信號(hào)不為零;該信號(hào)經(jīng)放大送入PID調(diào)節(jié)電路;PID調(diào)節(jié)信號(hào)送入動(dòng)圈的驅(qū)動(dòng)電路,改變動(dòng)圈中的電流,使得杠桿向平衡方向運(yùn)動(dòng);同時(shí),差分光電二極管的輸出信號(hào)減小,但由于PID調(diào)節(jié)環(huán)節(jié)的存在,調(diào)節(jié)信號(hào)繼續(xù)增大,直到杠桿回到平衡位置,遮光板回到零位。質(zhì)量稱量信號(hào)經(jīng)放大、濾波、A/D轉(zhuǎn)換后送人DSP信息處理單元進(jìn)行后續(xù)處理。
2紅外干燥箱的溫度檢測(cè)與控制
2.1溫控器原理
本系統(tǒng)選用MAXIM公司生產(chǎn)的自帶溫度補(bǔ)償?shù)腒型熱電偶串行模/數(shù)轉(zhuǎn)換器MAX6675為測(cè)量電路,選用雙向可控硅為控制元件,以DSP芯片TMS320LF2407為中心,設(shè)計(jì)了一套溫控器電路。
主電路由雙向可控硅BCR50GM控制,其開(kāi)關(guān)電流為50A,通過(guò)實(shí)際調(diào)試,確定了控制電路參數(shù),如圖2所示。
MAX6675將熱電偶輸出的mV信號(hào)直接轉(zhuǎn)換成數(shù)字信號(hào)送給DSP, MAX6675可對(duì)冷端溫度進(jìn)行補(bǔ)償。
DSP送出PWM控制信號(hào)驅(qū)動(dòng)光電耦合器MOC3061,以控制可控硅BCR50GM的導(dǎo)通與截止,使電阻爐的溫度能夠穩(wěn)定在給定點(diǎn)附近。
通過(guò)測(cè)量溫度與設(shè)定溫度比較來(lái)調(diào)節(jié)DSP輸出脈沖信號(hào)的占空比,進(jìn)一步控制鹵素紅外燈平均導(dǎo)通功率,從而達(dá)到調(diào)節(jié)溫度的目的。
2.2溫度控制方法 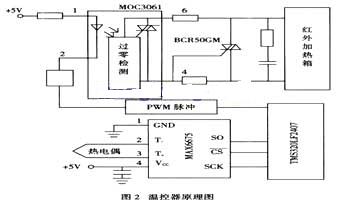 PID控制是一種技術(shù)成熟、應(yīng)用廣泛的控制方法,其結(jié)構(gòu)簡(jiǎn)單,參數(shù)整定方便,而且對(duì)大多數(shù)過(guò)程均有較好的控制效果,因而本系統(tǒng)采用了PID算法控制加熱艙溫度。
PID控制是一種技術(shù)成熟、應(yīng)用廣泛的控制方法,其結(jié)構(gòu)簡(jiǎn)單,參數(shù)整定方便,而且對(duì)大多數(shù)過(guò)程均有較好的控制效果,因而本系統(tǒng)采用了PID算法控制加熱艙溫度。
對(duì)于采用調(diào)壓調(diào)功方式的溫度控制,PID算式應(yīng)當(dāng)采用位置算式,即:
u(k)=u(k-1)+△u(k) (2)
式中:  u(k)為k時(shí)刻的輸入量;
u(k)為k時(shí)刻的輸入量;
u(k-1)為k-1時(shí)刻的輸入量;
△u(k)為輸入調(diào)節(jié)量;
Kp,K1,KD分別為比例系數(shù)、積分系數(shù)、微分系數(shù);
e(k)為當(dāng)前時(shí)刻的溫度與溫度設(shè)定值差;
e(k-1)為上次采樣時(shí)刻的溫度與溫度設(shè)定值差;
e(k-2)為再上次之差。
溫度變化是一個(gè)緩慢的過(guò)程,若單純采用PID控制,溫度超調(diào)量大,調(diào)節(jié)時(shí)間長(zhǎng),從通電加熱到溫度恒定至少需要20min,控制效率低,能源浪費(fèi)大,設(shè)備損壞率高。
時(shí)間最優(yōu)控制使系統(tǒng)從一個(gè)初始狀態(tài)轉(zhuǎn)到另一個(gè)狀態(tài)所經(jīng)歷的過(guò)渡時(shí)間最短。這種類型的最優(yōu)切換系統(tǒng),也稱為開(kāi)關(guān)控制(Bang-Bang)系統(tǒng)。即: 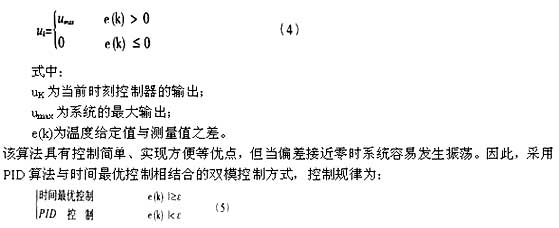 可以規(guī)定一閾值ε,當(dāng)偏差大于ε時(shí),實(shí)行時(shí)間最優(yōu)控制,而在閾值以內(nèi),實(shí)行PID控制。這樣,既可以發(fā)揮Bang-Bang控制快速消除大偏差的優(yōu)點(diǎn),又能發(fā)揮PID控制精度高,超調(diào)小的優(yōu)點(diǎn),從而使溫度控制過(guò)程的靜態(tài)、動(dòng)態(tài)性能指標(biāo)較為理想。
可以規(guī)定一閾值ε,當(dāng)偏差大于ε時(shí),實(shí)行時(shí)間最優(yōu)控制,而在閾值以內(nèi),實(shí)行PID控制。這樣,既可以發(fā)揮Bang-Bang控制快速消除大偏差的優(yōu)點(diǎn),又能發(fā)揮PID控制精度高,超調(diào)小的優(yōu)點(diǎn),從而使溫度控制過(guò)程的靜態(tài)、動(dòng)態(tài)性能指標(biāo)較為理想。
2.3參數(shù)整定
由于溫度變化速度較慢,本系統(tǒng)選擇采樣時(shí)間TS為5ms,其余調(diào)節(jié)參數(shù)均在PID仿真基礎(chǔ)上參考ZEGLER-NICHLE整定方法經(jīng)實(shí)驗(yàn)確定。  由于控制電路輸出脈沖信號(hào)的臨界電壓為1.66V,對(duì)應(yīng)數(shù)字量為AAH(十進(jìn)制數(shù)為170),所以將該電壓值作為系統(tǒng)首次進(jìn)入控制過(guò)程時(shí)u(k-1)值。
由于控制電路輸出脈沖信號(hào)的臨界電壓為1.66V,對(duì)應(yīng)數(shù)字量為AAH(十進(jìn)制數(shù)為170),所以將該電壓值作為系統(tǒng)首次進(jìn)入控制過(guò)程時(shí)u(k-1)值。
3 性能測(cè)試
本系統(tǒng)經(jīng)過(guò)反復(fù)溫控試驗(yàn)以及連續(xù)運(yùn)行的可靠性試驗(yàn),最終確定了PID算法的參數(shù)。當(dāng)系統(tǒng)施加給定升溫時(shí),在20~80℃范圍內(nèi)最大動(dòng)態(tài)超調(diào)小于土2℃,穩(wěn)態(tài)誤差小于±0.2℃,系統(tǒng)運(yùn)行狀態(tài)良好。其典型響應(yīng)曲線如圖3所示。 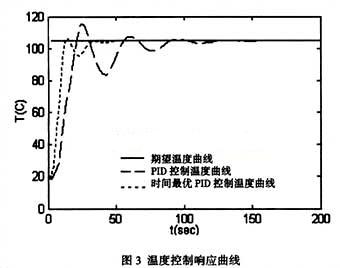
4 結(jié)論
本文提出了一種基于時(shí)間最優(yōu)-PID控溫水分測(cè)定電子天平,有效地避免了經(jīng)典方法水分測(cè)定的重復(fù)性,大大提高了測(cè)量速度,為水分測(cè)定標(biāo)準(zhǔn)方法的發(fā)展開(kāi)辟了新的途徑。這種一儀多用的新型天平簡(jiǎn)化了水分測(cè)定與質(zhì)量稱量的操作,有利于提高實(shí)驗(yàn)室分析測(cè)試的工作效率,減少設(shè)備投資,因而具有廣闊的應(yīng)用前景。
