
在嵌入式Linux開發(fā)過程中需要為指定設(shè)備編寫和編譯驅(qū)動程序,這與以往在PC機(jī)上的Linux驅(qū)動開發(fā)明顯不同,本文設(shè)計了基于S3C2440嵌入式Linux下激光雕刻系統(tǒng)的步進(jìn)電機(jī)驅(qū)動程序。
1 硬件系統(tǒng)的設(shè)計
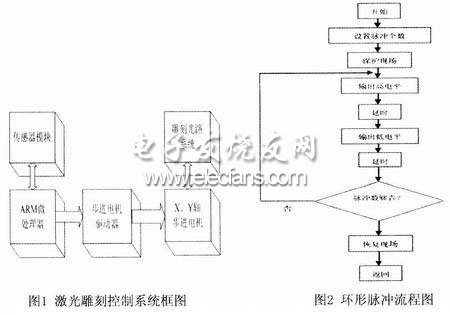
步進(jìn)電機(jī)開環(huán)控制系統(tǒng)主要由中央控制器、步進(jìn)電機(jī)驅(qū)動器、傳感器以及步進(jìn)電機(jī)四大部分組成。本系統(tǒng)采用基于ARM920t內(nèi)核的S3C244 0A微處理器作為控制系統(tǒng)的中央控制器,該芯片主頻400MHz,最高可達(dá)到533MHz,內(nèi)含多種設(shè)備接口,存儲器使用64MB的Nand Flash和64MB的SDRAM。圖1所示為控制系統(tǒng)框圖。
2 系統(tǒng)的工作原理
本系統(tǒng)主要控制兩個兩相混合式步進(jìn)電機(jī),分別代表X軸和Y軸帶動傳能光纖進(jìn)行激光雕刻。系統(tǒng)采用8路I/O口進(jìn)行脈沖輸出,每4路接一個步進(jìn)電機(jī)驅(qū)動器,通過功率放大后,進(jìn)入步進(jìn)電機(jī)的各項(xiàng)繞組。電機(jī)有半步、整步兩種工作模式,整步模式的步距角為1.8°,半步模式的步距角為0.9°,整步一周共200步。如:半步模式的兩步進(jìn)電機(jī)正轉(zhuǎn)脈沖為{0x11,0x33,0x22,0x66,0x44,Oxcc,0x88,0x99};整步模式為{0x11,0x22,0x44,0x88,0x11,0x22,0x44,0x88},一個步進(jìn)電機(jī)運(yùn)作時,只對脈沖時序的高或低4位操作,另外4位為0。而改變脈沖的順序,即可改變轉(zhuǎn)動方向。在整個控制系統(tǒng)中,數(shù)據(jù)處理在Linux應(yīng)用程序中完成,步進(jìn)量傳遞給Linux驅(qū)動程序后,由驅(qū)動程序完成脈沖輸出。通過軟件來完成脈沖分配,可根據(jù)應(yīng)用系統(tǒng)的需要,隨時改變對步進(jìn)電機(jī)的控制。
3 嵌入式Linux步進(jìn)電機(jī)驅(qū)動程序的設(shè)計
Linux操作系統(tǒng)將所有的設(shè)備(而不僅是存儲器里的文件)都看成文件,以操作文件的方式訪問設(shè)備。應(yīng)用程序不能直接操作硬件,而是使用統(tǒng)一的接口函數(shù)調(diào)用硬件驅(qū)動程序。設(shè)備驅(qū)動程序是操作系統(tǒng)內(nèi)核和硬件之間的接口。Linux設(shè)備驅(qū)動與內(nèi)核接口可分為三大方面:a.與系統(tǒng)啟動代碼的接口對設(shè)備進(jìn)行初始化;b.與內(nèi)核接口通過數(shù)據(jù)結(jié)構(gòu)file.operrations來完成;c.與設(shè)備的接口對設(shè)備進(jìn)行讀寫操作。
步進(jìn)電機(jī)是將電脈沖信號轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元件。而脈沖信號的頻率和脈沖數(shù)是控制電機(jī)的兩個重要方面。本系統(tǒng)步進(jìn)電機(jī)4路脈沖輸出由硬件地址0x28000006的bit0~bit3控制,bit0對應(yīng)MOTOR A+,bit1對應(yīng)MOTOR B+,bit2對應(yīng)MOTOR_A-,bit3對應(yīng)MOTOR_B-。這里針對整步模式下的步進(jìn)電機(jī)進(jìn)行脈沖分配信號,半步模式的步進(jìn)電機(jī)正轉(zhuǎn)導(dǎo)電狀態(tài)時的控制順序?yàn)锳+_A+B+_B+_B+A-_A-_一A-B-_B-,整步模式的步進(jìn)電機(jī)正轉(zhuǎn)導(dǎo)電狀態(tài)時的控制順序?yàn)锳+_B+_A-_B-。
因此在程序中需要通過編制脈沖分配信號來控制步進(jìn)電機(jī),并通過修改脈沖分配信號來實(shí)現(xiàn)對步進(jìn)電機(jī)方向的控制。圖2是用軟件形成環(huán)形脈沖的流程圖。
系統(tǒng)中的步進(jìn)電機(jī)只響應(yīng)應(yīng)用程序傳送給驅(qū)動的步進(jìn)量和部分參數(shù),只能順序地進(jìn)行控制操作,因此它可作為字符設(shè)備來進(jìn)行驅(qū)動。在驅(qū)動程序中,需要提供幾個操作函數(shù)的入口點(diǎn),分別為open、read、write、ioet1等。而ioct1函數(shù)尤為重要,系統(tǒng)通過調(diào)用這個函數(shù)可以控制步進(jìn)電機(jī)的轉(zhuǎn)動。
在初始化函數(shù)中,會將驅(qū)動程序的file operations結(jié)構(gòu)連同其主設(shè)備號一起向內(nèi)核進(jìn)行注冊。對于字符設(shè)備使用以下函數(shù)進(jìn)行注冊:int register_chrdev(unsigned int major,const char*name,struct file_operations*fops);其中,unsigned int major為定義的主設(shè)備號,const char*name為定義的設(shè)備名稱,這里把設(shè)備名宏定義為stepper。file_operations*fops為定義的指針變量。申請控制步進(jìn)電機(jī)的端口用以下函數(shù)進(jìn)行調(diào)用:request_region(0x28000006, 1, const char*name);因?yàn)椴竭M(jìn)電機(jī)用到了I/O端口,而在S3C2440中操作端口要用虛擬地址而非實(shí)際的物理地址,因此要修改內(nèi)核代碼。修改文件內(nèi)核源代碼中間的smdk.c,該文件在linux/arch/arm/mach-s3c2440中,在結(jié)構(gòu)體static struct map_descsmdk_io_desc[]中添加一行數(shù)組元素{0xd3000000,0x28000000,Ox01000000,DOMAIN_IO,0,1,0,0},則步進(jìn)電機(jī)的物理地址0x28000006對應(yīng)的虛擬地址為0xd3000006,在驅(qū)動程序中應(yīng)對這個地址進(jìn)行操作。
根據(jù)上面提到的步進(jìn)電機(jī)的脈沖分配信號,定義它半步模式正轉(zhuǎn)脈沖為:
unsigned char pulse_table[]=
{0x11,0x33,0x22,0x66,0x44,Oxcc,0x88,0x99};
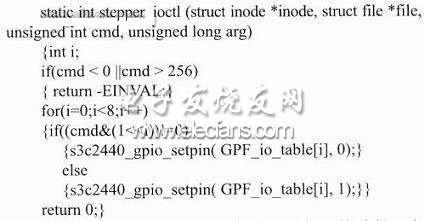
利用應(yīng)用程序傳遞給stepper ioct1的參數(shù)arg來判斷轉(zhuǎn)動方向。編寫ioctl函數(shù)用來接收應(yīng)用程序?qū)τ诓竭M(jìn)電機(jī)的控制。以下是部分驅(qū)動程序代碼:
設(shè)備卸載與前面提到的設(shè)備注冊是相反的過程。當(dāng)從系統(tǒng)中卸載一個模塊時,主設(shè)備號要得到釋放。這一操作可以調(diào)用以下函數(shù)進(jìn)行模塊清除:
int unregister_chrdev(unsigned int major,const char*name);
首先,編譯步進(jìn)電機(jī)模塊,打開內(nèi)核中drivers/char/Konfig文件,添加如下語句:
Config STEPPER_MODULE、tristate"stepper module"、depends on ARCH_S3C2440、help、stepper driver module。
在終端中運(yùn)行命令make menuconfig,進(jìn)入內(nèi)核配置主菜單,在DeviceDriver→Character device菜單中看到剛才所添加的選項(xiàng)了,之后編譯為模塊方式。
其次,打開內(nèi)核中drivers/char/Makefile文件,添加如下語句:
obj-$(CONFIG_STEPPER_MODELL)+=stepper_module.o
最后,回到內(nèi)核源代碼根目錄位置,執(zhí)行make modules,就可生成系統(tǒng)所需要的內(nèi)核模塊文件stepper module.ko了。至此,完成了步進(jìn)電機(jī)模塊驅(qū)動的編譯。之后,便可使用insmod、rmmod命令分別對模塊進(jìn)行加載、卸載了。
4 結(jié)論
本文歸納了驅(qū)動程序開發(fā)的一般流程,并結(jié)合步進(jìn)電機(jī)的驅(qū)動闡述了驅(qū)動程序的編寫。與原有通過操作PC機(jī)來控制步進(jìn)電機(jī)相比,本文是在Linux操作系統(tǒng)支持MMU的情況下完成了對步進(jìn)電機(jī)的控制。