
在電力系統(tǒng)變電所以及電氣化鐵道牽引變電所遠(yuǎn)動控制系統(tǒng)中,遠(yuǎn)程數(shù)據(jù)采集與監(jiān)控終端(RTU)是關(guān)鍵設(shè)備,實現(xiàn)遙控、遙測、遙信等功能。
采用工業(yè)控制計算機(jī),擴(kuò)展測控硬件接口電路,是RTU設(shè)計常見的方法,但是這種方法設(shè)計的RTU成本高、體積大、耗電大。采用80C196等單片機(jī)設(shè)計RTU,由于單片機(jī)的運算處理和硬件擴(kuò)展等能力較低,影響RTU的性能。而基于ARM處理器設(shè)計的RTU,硬件上具有成本低、體積小、耗電省、處理能力強(qiáng)等優(yōu)點;軟件上由于采用μClinux操作系統(tǒng),有許多優(yōu)秀的應(yīng)用程序成果可以利用。正是由于這些優(yōu)勢,采用ARM和μClinux設(shè)計RTU已經(jīng)成為一個熱點[1]。
1 RTU硬件電路設(shè)計
1.1 RTU總體結(jié)構(gòu)
RTU的核心部分是計算機(jī),包括處理器、存儲器、人機(jī)接口等。為了執(zhí)行RTU的測控功能,需要擴(kuò)展大量外圍接口電路。不同變電所的測控對象數(shù)量差別很大。為了提高RTU的通用性,一種普遍采用的可行的辦法是將測控電路模塊化。根據(jù)模塊化的設(shè)計思想以及S3C4510B[2]和μClinux[3]的特點,RTU硬件總體結(jié)構(gòu)設(shè)計的原理框圖如圖1。

各種電路按功能設(shè)計成相應(yīng)模塊,以母板總線為接口基礎(chǔ)。
主板模塊以S3C4510B為核心。主要配置是:16M字節(jié)動態(tài)隨機(jī)存儲器SDRAM(兩片HY57V651620B),2M字節(jié)的Flash(一片AM29LV160DB);處理器內(nèi)部集成兩個異步串行通信接口,串口0和串口1;一個10Mbps以太網(wǎng)接口;看門狗與復(fù)位電路(MAX507);RTU母板總線驅(qū)動電路。
串口0作為控制臺,用于調(diào)試;串口1接LCD顯示屏和觸摸屏,實現(xiàn)當(dāng)?shù)乇O(jiān)控的人機(jī)界面。
測控接口電路主要有遙控模塊、遙信模塊(開關(guān)量采集)和遙測模塊(模擬量采集)。遙控和搖信模塊由母板總線直接擴(kuò)展。遙測模塊采用現(xiàn)場總線(CAN)通信接口。為此在RTU母板總線上擴(kuò)展CAN總線通信模塊,實現(xiàn)與遙測模塊的通信。
串口模塊(PC16C550)從母板總線上擴(kuò)展。用該模塊連接調(diào)制解調(diào)器(MODEM),實現(xiàn)RTU遠(yuǎn)程通信。
1.2 RTU母板總線
RTU母板總線是測控硬件模塊擴(kuò)展的基礎(chǔ),又是處理器總線上的一個外設(shè)接口。
為便于模塊的擴(kuò)展,RTU母板總線定義如下:數(shù)據(jù)總線H-D0~H-D7;地址總線H-A0~H-A7;地址片選信號H-S0~H-S6;讀寫控制信號H-WR和H-RD;地址鎖存控制信號H-ALE;中斷服務(wù)請求控制信號H-INT0~H-INT3;復(fù)位信號H-RESET。
使用處理器的如下總線信號驅(qū)動RTU母板總線:地址總線A0~A11、數(shù)據(jù)總線D0~D7、讀使能控制信號nOE、寫使能控制信號nWBE0、外設(shè)(I/O)地址片選信號nECS0,以及4根中斷控制信號線nINREQ0~nINREQ3。
1.2.1 總線驅(qū)動電路
為兼容測控接口電路較常用的器件,母板總線按照5V的TTL電平設(shè)計。S3C4510B總線是3.3V的CMOS電平。
處理器總線與RTU母板總線存在速度和電平上的差別,不能直接相連,它們之間需要一個總線驅(qū)動電路。
總線驅(qū)動電路是主板模塊的一部分。它實現(xiàn)處理器總線到RTU母板總線的接口擴(kuò)展、電平轉(zhuǎn)換和驅(qū)動。總線驅(qū)動接口電路如圖2。
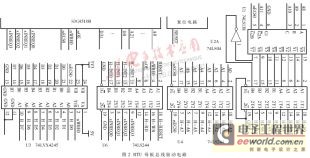
采用雙電源供電的雙向總線緩沖器74LVX4245,實現(xiàn)處理器數(shù)據(jù)總線與RTU母板數(shù)據(jù)總線之間的電平轉(zhuǎn)換和驅(qū)動。
三八譯碼器U1,將2K字節(jié)地址空間譯為8個地址片選信號,稱為S0~S7,其中S0~S6由總線驅(qū)動芯片74LS244驅(qū)動后,作為RTU母板總線地址片選信號。
1.2.2 地址鎖存信號ALE實現(xiàn)
一些常用的芯片,如CAN總線控制器SJA1000、時鐘芯片DS12887等,內(nèi)部帶一個地址鎖存器,需要地址鎖存信號ALE,才能實現(xiàn)接口。S3C4510B沒有ALE信號,所以母板總線擴(kuò)展ALE信號,才能實現(xiàn)這類器件的接口。
將U1的一個地址片選信號S7取反,寫數(shù)據(jù)到S7地址,可以模擬出ALE控制信號,并實現(xiàn)ALE的功能。
1.2.3 RTU母板總線的地址和訪問速度
RTU母板總線作為處理器的一個外設(shè),其地址和訪問速度由處理器決定。
S3C4510B總線統(tǒng)一編址。nECS0是外設(shè)地址片選信號,占外設(shè)地址空間起始的16K字節(jié)。
nECS0接U3使能端,決定RTU母板總線的基地址和訪問速度。S3C4510B控制寄存器EXTDBWTH第20位置1、21位置0,表示nECS0按8位方式尋址。寄存器REFEXTCON的低10位設(shè)為0x360,則nECS0的基地址是0x3600000。
置控制寄存器EXTACON0為0x0fff,則S3C4510B對RTU母板總線的讀寫時間是7個CPU時鐘周期。
1.3 基于RTU母板總線的模塊擴(kuò)展
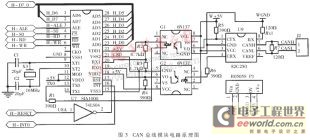
圖3是擴(kuò)展CAN總線通信模塊的電路原理圖。CAN總線模塊以SJA1000為核心,通信數(shù)據(jù)經(jīng)高速光電耦合器G1、G2隔離,82C250驅(qū)動,從接線端子J2連接到外部CAN總線。P1是1W的5V轉(zhuǎn)5V的DC/DC電源模塊。CAN模塊使用H-S0作為片選信號,其基地址是0x3600000。
圖3給出了SJA1000與RTU母板總線的連接關(guān)系。SJA1000總線兼容TTL電平,數(shù)據(jù)總線和中斷信號線有驅(qū)動能力,可以直接與母板總線接口。由圖3可見,從RTU母板總線上擴(kuò)展測控電路簡單方便。
基于母板總線的其它模塊擴(kuò)展方法類似。
2 RTU軟件設(shè)計
μClinux從linux操作系統(tǒng)改進(jìn)而來,適合運行在S3C4510B這種無內(nèi)存管理單元MMU的處理器中。基于工控機(jī)-linux的RTU程序,可以很方便地移植到ARM-μClinux設(shè)計的RTU中。
RTU程序的開發(fā),包括應(yīng)用程序開發(fā)和驅(qū)動程序開發(fā)兩部分,全部采用C語言編寫。
2.1 RTU應(yīng)用程序調(diào)試
使用JTAG仿真器工具和相應(yīng)工具軟件,將μClinux操作系統(tǒng)燒寫到主板模塊的Flash中。μClinux在主板模塊上運行后,可以使用μClinux提供的工具軟件在Flash上更新自身及應(yīng)用程序。
連接PC機(jī)的串口與主板模塊的串口0。用Windows超級終端,與主板模塊建立交互關(guān)系。將主板模塊與PC機(jī)接入同一個局域網(wǎng),配置合適的IP地址。
使用文件傳輸服務(wù)工具FTP或TFTP,將PC機(jī)編譯的μClinux應(yīng)用程序下載到主板模塊/ramdisk目錄中,改為可執(zhí)行屬性后執(zhí)行。應(yīng)用程序中加入printf()函數(shù),輸出執(zhí)行過程中的調(diào)試信息。
2.2 JFFS2文件系統(tǒng)應(yīng)用
JFFS2(The Journalling Flash File System, version 2)是一種為嵌入式系統(tǒng)Flash存儲文件而設(shè)計的文件系統(tǒng)。μClinux編譯選項,加入JFFS2文件系統(tǒng)。將2MB的Flash分成mtd0和mtd1兩個區(qū),各為1MB。mtd0是從0地址開始的存儲空間,用于存儲μClinux操作系統(tǒng)鏡像文件。mtd1用于存儲應(yīng)用程序。μClinux的/dev目錄中,有字符型設(shè)備文件mtd0、mtd1和對應(yīng)的塊設(shè)備文件mtdblock0、mtdblock1。
有了JFFS2文件系統(tǒng)支持,使用文件拷貝操作方法,即可將RTU的操作系統(tǒng)和應(yīng)用程序在Flash上更新。RTU的開發(fā)和現(xiàn)場調(diào)試,可以脫離JTAG仿真器工具,給RTU開發(fā)和維護(hù)提供了方便。
2.3 更新μClinux的步驟
(1)用FTP傳輸操作系統(tǒng)文件IMAGE.ROM到/ramdisk/目錄;(2)擦除mtd0分區(qū):eraseall /dev/mtd0;(3)將IMAGE.ROM寫入mtd0:cp/ramdisk/IMAGE.ROM/dev/mtd0。
當(dāng)提示操作完成后,復(fù)位主板模塊即運行新的操作系統(tǒng)。由于μClinux操作系統(tǒng)在SDRAM中運行,更新操作系統(tǒng)過程中不能停電。
2.4 應(yīng)用程序在Flash上的更新與執(zhí)行
(1)安裝mtd1分區(qū):mount-t-jffs2 /dev/mtdblock1/mnt。此操作將mtd1分區(qū)按塊設(shè)備方式安裝在μClinux的/mnt目錄中。在/mnt目錄中添加的文件,存儲在Flash中,不會因掉電而丟失。(2)將應(yīng)用程序myapp下載到/ramdisk目錄,然后cp /ramdisk/myapp /mnt。即完成了應(yīng)用程序在Flash上的更新。(3)修改文件屬性:chmod 755 /mnt/myapp。(4)執(zhí)行文件:./mnt/myapp。
μClinux啟動后,讀取并執(zhí)行/proc/rc文件中的命令。要使myapp應(yīng)用程序自動執(zhí)行,在rc文件中,加入
mount -t jffs2 /dev/mtdblock1 /mnt
./mnt/myapp
系統(tǒng)啟動后,自動安裝mtd1分區(qū),執(zhí)行應(yīng)用程序myapp。
基于本文設(shè)計的RTU,連接到一個電網(wǎng)數(shù)據(jù)采集與監(jiān)控系統(tǒng),經(jīng)試運行,性能穩(wěn)定可靠。證明文中設(shè)計的RTU的原理是正確的。
參考文獻(xiàn)
1 嚴(yán)亞勤,吳文傳,張伯明. 基于嵌入式Linux的網(wǎng)絡(luò)RTU[J]. 電力自動化設(shè)備,2004;24(9):27~29
2 μm_s3c4510b_rev1.pdf. www.samsung.com.
3 皺思秩.嵌入式Linux設(shè)計與應(yīng)用[M].北京:清華大學(xué)出版社,2002.第1版