激光跟蹤儀作為一種高精度便攜式的三坐標(biāo)測(cè)量設(shè)備,在世界汽車(chē)制造業(yè)使用并不是一個(gè)新鮮事物。在歐洲,標(biāo)致雪鐵龍汽車(chē)公司和雷諾汽車(chē)公司已經(jīng)大量采用了美國(guó)自動(dòng)精密工程公司(Automated Precision, Inc縮寫(xiě)API)生產(chǎn)的TrackerIIPlus激光跟蹤儀代替關(guān)節(jié)臂等其他現(xiàn)場(chǎng)測(cè)量設(shè)備,在中國(guó),上海通用也已經(jīng)選用兩臺(tái)美國(guó)API公司的TrackerIIPlus激光跟蹤儀用于生產(chǎn)現(xiàn)場(chǎng)工裝檢測(cè)以及白車(chē)身和沖壓件測(cè)量。今天的跟蹤儀早已突破了早期跟蹤儀外型笨重,校準(zhǔn)頻繁,操作復(fù)雜,受環(huán)境影響大等局限性,成為了現(xiàn)代汽車(chē)制造業(yè)中用途廣泛的一種測(cè)量?jī)x器。由美國(guó)API公司制造的TrackerIIPlus激光跟蹤儀跟蹤頭重量?jī)H有8.3kg,連接上配套的輕便三腳架后總重量也不超過(guò)20kg,可以在生產(chǎn)線上方便地安裝。

API第三代激光跟蹤儀 TrackerIII
激光跟蹤儀的一個(gè)典型應(yīng)用是用于焊裝車(chē)間工裝夾具的裝調(diào)。車(chē)身焊裝是整個(gè)汽車(chē)制造中最重要的環(huán)節(jié)之一,焊裝質(zhì)量的優(yōu)劣不但關(guān)乎后續(xù)總裝能否正常進(jìn)行,對(duì)轎車(chē)來(lái)說(shuō)更有可能影響到整個(gè)車(chē)身的強(qiáng)度和安全性。而焊裝質(zhì)量又直接取決于焊裝夾具的定位精度。在過(guò)去,汽車(chē)生產(chǎn)線上工裝夾具的最初安裝定位,一般是先制造一部樣車(chē),樣車(chē)精度通過(guò)固定式三坐標(biāo)測(cè)量機(jī)來(lái)保證,然后將樣車(chē)放置在工位上,調(diào)整夾頭位置使各個(gè)工作面和樣車(chē)貼合好,實(shí)際上這部樣車(chē)起到了測(cè)量中傳遞樣棒的作用。通過(guò)樣車(chē)調(diào)節(jié)好各個(gè)夾頭位置后,再用關(guān)節(jié)臂這類精度級(jí)別相對(duì)較低的現(xiàn)場(chǎng)測(cè)量設(shè)備進(jìn)行復(fù)測(cè)檢驗(yàn)。
激光跟蹤儀輔助裝調(diào)焊裝夾具
關(guān)節(jié)臂由于測(cè)量范圍很小,不可能在一個(gè)測(cè)量站位中測(cè)量到車(chē)身原始定位基準(zhǔn)一孔一槽三個(gè)定位面,所以最初的坐標(biāo)系往往需要通過(guò)一到兩次移站來(lái)建立,這樣關(guān)節(jié)臂所建的基準(zhǔn)坐標(biāo)系中必然包含移站誤差,這直接限制了復(fù)測(cè)的精度級(jí)別,無(wú)法保證大范圍內(nèi)的相對(duì)位置精度。另外,眾所周知,關(guān)節(jié)臂由于其原理上的局限性,實(shí)際使用壽命是相當(dāng)短的,經(jīng)過(guò)一段時(shí)間的使用,甚至是設(shè)備閑置后,關(guān)節(jié)部位軸承的磨損以及臂身的變形都會(huì)導(dǎo)致精度嚴(yán)重下降,而且這種精度下降是不可補(bǔ)償?shù)摹R驗(yàn)樯鲜鲈颍秆b夾具的定位精度實(shí)質(zhì)上極大的依賴于樣車(chē)精度,但樣車(chē)作為樣棒使用最致命的缺點(diǎn)是容易變形,樣車(chē)本身只是一個(gè)精度級(jí)別較高的白車(chē)身,是一個(gè)殼體零件,雖然經(jīng)過(guò)固定式三坐標(biāo)測(cè)量機(jī)檢測(cè)合格,但是在裝運(yùn)到現(xiàn)場(chǎng)以及后續(xù)裝調(diào)過(guò)程中由于溫度變化、外力作用等因素發(fā)生變形都是不可預(yù)測(cè)的,這部分誤差將直接變成焊裝夾具的定位誤差。如果采用激光跟蹤儀,首先在較大測(cè)量范圍內(nèi)不需要移站,能保證較高精度的基準(zhǔn)坐標(biāo)系(5m內(nèi)精度為±0.025mm)。有了這個(gè)準(zhǔn)確的基準(zhǔn)坐標(biāo)系,導(dǎo)入數(shù)學(xué)模型后可以直接用車(chē)身數(shù)模為比對(duì)基準(zhǔn)來(lái)調(diào)整夾具定位面。因?yàn)閵A具定位面的理論數(shù)模和車(chē)身上定位面的理論數(shù)模是重合的,所以無(wú)須為夾具測(cè)量專門(mén)創(chuàng)建數(shù)模。建立基準(zhǔn)坐標(biāo)系以后,將靶球放在需要調(diào)節(jié)的夾具定位面(定位銷(xiāo))上,軟件計(jì)算出靶球中心坐標(biāo)到定位面(定位銷(xiāo))數(shù)模的投影距離,根據(jù)靶球半徑作補(bǔ)償計(jì)算得到3D偏差的方向和數(shù)值,實(shí)時(shí)顯示在計(jì)算機(jī)屏幕上,觀察并調(diào)節(jié)這個(gè)偏差到公差范圍內(nèi)。采用這種測(cè)量工藝后,不再依賴樣車(chē)精度,減少了誤差傳遞的中間環(huán)節(jié),同時(shí)節(jié)省了制造和測(cè)量樣車(chē)的成本。優(yōu)勢(shì)是顯而易見(jiàn)的。關(guān)節(jié)臂雖然從測(cè)量方法和軟件上也能執(zhí)行上述工藝,但是測(cè)量范圍和精度都無(wú)法達(dá)到工藝的要求。激光跟蹤儀本身以其自帶的激光干涉儀作為長(zhǎng)度標(biāo)準(zhǔn),光柵碼盤(pán)作為角度標(biāo)準(zhǔn),通過(guò)自身的一系列校準(zhǔn)程序,可以在整個(gè)產(chǎn)品壽命周期中始終保持高精度的工作狀態(tài)。通常,在固定工作場(chǎng)所使用和存放的API激光跟蹤儀,一般做自校準(zhǔn)的周期可長(zhǎng)達(dá)數(shù)月。而激光跟蹤儀自校準(zhǔn)所花費(fèi)的時(shí)間則不超過(guò)十分鐘。

API 5D/6D激光干涉儀
API公司不僅是激光跟蹤儀在全球范圍內(nèi)的最初發(fā)明人,而且不斷推出許多新的擴(kuò)展技術(shù)。傳統(tǒng)的激光跟蹤測(cè)量技術(shù)在汽車(chē)行業(yè)遇到的最大挑戰(zhàn)是光線阻斷的問(wèn)題,而現(xiàn)在這一難題有了兩套行之有效的解決方案,一是絕對(duì)測(cè)距技術(shù)(absolute distance measurement. 縮寫(xiě)ADM),一是智能測(cè)頭技術(shù)(Itelliprobe)。
傳統(tǒng)的激光跟蹤儀因?yàn)椴捎眉す飧缮娴脑頊y(cè)量靶球到跟蹤頭的距離,要求激光頭和靶球之間的光線始終不能被阻斷,在測(cè)量汽車(chē)工裝夾具時(shí)這點(diǎn)往往是很難保證的。API的絕對(duì)測(cè)距(ADM)技術(shù)允許跟蹤過(guò)程中斷光,甚至可以直接把靶球放到目標(biāo)位置,然后再將跟蹤頭指向靶球進(jìn)行測(cè)量,這是一種基于紅外光脈沖反射拍頻計(jì)數(shù)的絕對(duì)測(cè)距技術(shù),其10m內(nèi)精度可以高達(dá)0.02mm。這項(xiàng)技術(shù)在在線檢測(cè)汽車(chē)夾具重復(fù)定位精度方面效果非常好。通常我們把光學(xué)靶安裝在活動(dòng)的夾頭上,每次夾頭到達(dá)工作位置后,軟件驅(qū)動(dòng)跟蹤頭指向光學(xué)靶的理論位置,實(shí)際每次夾頭所處的位置都將偏離理論位置,跟蹤頭將在理論位置周?chē)月菪€軌跡運(yùn)動(dòng)搜索光學(xué)靶,鎖定目標(biāo)后再用絕對(duì)測(cè)距技術(shù)測(cè)出光學(xué)靶到跟蹤頭的距離,從而計(jì)算出此時(shí)夾頭所處的實(shí)際位置。在軟件的配合下激光跟蹤儀可以在極短時(shí)間(通常只需幾秒鐘)就測(cè)量出多個(gè)夾頭的重復(fù)定位精度,且精度遠(yuǎn)遠(yuǎn)高于基于數(shù)碼相機(jī)的交匯照相測(cè)量技術(shù)。
另外,API的TrackerIIPlus還支持一種智能測(cè)頭技術(shù),智能測(cè)頭是一種特殊的光學(xué)靶。底部裝有長(zhǎng)度可達(dá)幾百毫米的測(cè)桿,光靶設(shè)置在測(cè)頭的頂端。智能測(cè)頭內(nèi)部集成的傳感器,可以感知智能測(cè)頭相對(duì)于激光光線的姿態(tài)角變化。通過(guò)頂端光學(xué)靶的坐標(biāo)值和姿態(tài)角計(jì)算出底部測(cè)桿尖端的坐標(biāo)值,這樣就可以用測(cè)桿尖端去測(cè)量激光照射不到的工件背面以及較深的孔和槽。智能測(cè)頭的外形如圖3所示。

智能測(cè)頭
激光跟蹤儀像所有的三坐標(biāo)測(cè)量設(shè)備一樣,提供了豐富的建坐標(biāo)方式,除了傳統(tǒng)的三點(diǎn)建坐標(biāo)、點(diǎn)線面建坐標(biāo)、多點(diǎn)擬合坐標(biāo)系等方式以外,還提供了一種獨(dú)特的復(fù)雜擬合建坐標(biāo)方式,這種建坐標(biāo)方式允許使用工件上的任意曲面、平面、定位孔、定位點(diǎn)組合起來(lái)作為建坐標(biāo)的基準(zhǔn),擬合計(jì)算出工件坐標(biāo)系。

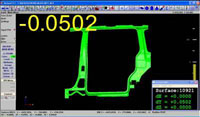
在工件數(shù)模上選擇擬合坐標(biāo)系基準(zhǔn)
如圖4所示,首先在導(dǎo)入的工件數(shù)學(xué)模型上選擇適當(dāng)?shù)幕鶞?zhǔn)面上的表面點(diǎn)(對(duì)應(yīng)工裝上的定位面)和基準(zhǔn)孔中心(對(duì)應(yīng)工裝上的定位銷(xiāo)),然后依次測(cè)量工件上的這些基準(zhǔn)元素位置,得到擬合計(jì)算的結(jié)果。如果定位基準(zhǔn)屬于過(guò)定位,通過(guò)分析結(jié)果數(shù)據(jù),可以知道基準(zhǔn)之間存在哪些沖突,然后再?zèng)Q定是否應(yīng)該舍棄某些可能存在問(wèn)題的基準(zhǔn)(通過(guò)放棄某些擬合計(jì)算約束條件來(lái)實(shí)現(xiàn)),這種復(fù)雜擬合建坐標(biāo)的功能使得激光跟蹤儀可以代替各種機(jī)械工裝檢具來(lái)檢測(cè)白車(chē)身和沖壓件。具體方法是,首先固定好零件,選擇工裝檢具檢測(cè)時(shí)的定位元素(包括定位面和定位銷(xiāo))作為建坐標(biāo)的參考基準(zhǔn),這樣擬合得到的工件坐標(biāo)系,就準(zhǔn)確再現(xiàn)了機(jī)械檢具檢測(cè)時(shí)使用的工件坐標(biāo)系,此時(shí)測(cè)量出的工件偏差和機(jī)械檢具檢測(cè)出的偏差數(shù)據(jù)一致,能準(zhǔn)確反映工件的實(shí)際狀態(tài)。這就是所謂的“電子工裝”技術(shù)。白車(chē)身、焊裝夾具、檢具的檢測(cè)需要遵循的原則就是,建坐標(biāo)的基準(zhǔn)和實(shí)際工件的安裝定位基準(zhǔn)或者工作基準(zhǔn)保持一致,這樣才能最大限度的減小測(cè)量坐標(biāo)系帶來(lái)的誤差。采用這種基于數(shù)學(xué)模型的“電子工裝”技術(shù),在節(jié)省下制造機(jī)械工裝的高額成本的同時(shí)也省去了對(duì)這些機(jī)械工裝進(jìn)行檢測(cè)和維護(hù)的人力資源,可以大大提高生產(chǎn)效率。
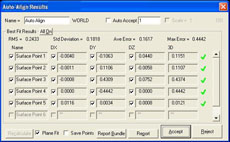
擬合計(jì)算的調(diào)整和計(jì)算結(jié)果
此外,激光跟蹤儀也可以用于汽車(chē)外形設(shè)計(jì)。由藝術(shù)家在木模上雕刻設(shè)計(jì)的新車(chē)型,需要精確的變成計(jì)算機(jī)中的數(shù)學(xué)模型,在以往,這需要一臺(tái)造價(jià)不菲的高精度大型導(dǎo)軌式三坐標(biāo)測(cè)量機(jī),而現(xiàn)在一臺(tái)TrackerIIPlus激光跟蹤儀,配合其功能強(qiáng)大的測(cè)量軟件就能完成這套復(fù)雜的逆向工程,激光跟蹤儀形式多樣的動(dòng)態(tài)掃描工作方式,能夠精確反求出空間自由曲線、曲面的數(shù)學(xué)模型,從而大大降低沖壓模具的生產(chǎn)制造成本,同時(shí),激光跟蹤儀也可以用于這些沖壓模具和工件的檢測(cè)。
激光跟蹤儀測(cè)量技術(shù)在我國(guó)的汽車(chē)生產(chǎn)在線檢測(cè)領(lǐng)域還是方興未艾,在汽車(chē)制造業(yè)中推廣應(yīng)用有著廣闊的前景。
參考文獻(xiàn):
[1]《激光跟蹤測(cè)量系統(tǒng)的原理及在車(chē)身在線檢測(cè)中的應(yīng)用》,李廣云。《上海計(jì)量測(cè)試》,2002年04期。
[2]《激光跟蹤儀在大尺寸工件幾何參數(shù)測(cè)量中的應(yīng)用》,張春富、張軍、唐文彥、盧紅根。《工具技術(shù)》,2002年05期。
[3]《采用激光跟蹤儀測(cè)量飛機(jī)外形》,韓清華、鄭保、郭宏利、王鴻翔。《航空計(jì)測(cè)技術(shù)》,2004年01期。
[4]《使用激光跟蹤儀確定數(shù)控機(jī)床空間位置關(guān)系》,劉曉東。《制造業(yè)自動(dòng)化》,2004年08期。
