
摘 要: 介紹一種高效率、高精度的振動(dòng)測(cè)量和分析方法。與傳統(tǒng)方法不同,該方法是基于計(jì)算機(jī)及其運(yùn)行環(huán)境的一種無接觸測(cè)量方法,通過測(cè)量與分析軟件實(shí)現(xiàn)對(duì)振動(dòng)圖象的數(shù)字化處理,從而獲得傳統(tǒng)方法無法達(dá)到的滿意效果。
關(guān)鍵詞: 振動(dòng) 測(cè)量與分析 圖象處理
太陽能電池帆板是人造衛(wèi)星的主要能源。在衛(wèi)星巡航時(shí),太陽能電池帆板必須隨時(shí)根據(jù)陽光照射的方向來調(diào)整自己的方位。這就相當(dāng)于在不斷給太陽能電池帆板施加激勵(lì),由于電池帆板具有薄而大的物理特性,所以這個(gè)激勵(lì)很容易導(dǎo)致振顫。在一定條件下,還有可能演變成共振,這樣就非常容易損壞太陽能電池帆板,以至于衛(wèi)星無法正常工作。因此,對(duì)衛(wèi)星的電池帆板的振動(dòng)特性做一個(gè)詳細(xì)而精確的測(cè)量與分析,并由此來決定帆板的控制結(jié)構(gòu)與控制規(guī)律,對(duì)于保障衛(wèi)星的安全運(yùn)行具有重大的意義。這正是開發(fā)這個(gè)系統(tǒng)的初衷。同時(shí),任何一個(gè)力學(xué)系統(tǒng)在工作時(shí)都有可能發(fā)生振動(dòng),而且這些振動(dòng)往往會(huì)影響該系統(tǒng)的正常工作。而當(dāng)前所使用的測(cè)量和分析方法主要是力學(xué)測(cè)量與分析方法,這種方法測(cè)量系統(tǒng)龐大,數(shù)據(jù)分析效率低下,甚至有時(shí)會(huì)損壞待測(cè)結(jié)構(gòu)并且所獲得的結(jié)果具有較大的隨機(jī)性。所以,提出一種基于計(jì)算機(jī)的高效、高精度的測(cè)量與分析的方法具有廣闊前景和深遠(yuǎn)意義。
1 系統(tǒng)整體組成框圖
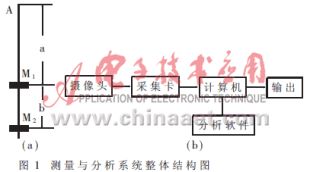
計(jì)算機(jī)振動(dòng)測(cè)量分析系統(tǒng)主要由待測(cè)物體部分、光學(xué)成像部分、數(shù)據(jù)傳輸部分、計(jì)算分析部分和結(jié)果輸出部分構(gòu)成。其具體結(jié)構(gòu)如圖1所示。
2 系統(tǒng)主要硬件介紹
2.1 CCD黑白攝像頭
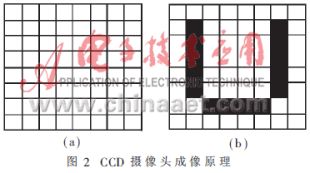
CCD攝像管是電荷耦合器件,在硅片上集成了以陣列分布的成像單元及相應(yīng)的控制電路、輸出電路。當(dāng)有一束平行光照射到鏡頭上時(shí),所有的成像單元處于導(dǎo)通狀態(tài),輸出的圖象為全亮平面(圖2a);當(dāng)有一個(gè)U形物體擋在鏡頭前方時(shí),由于部分光線被擋住,導(dǎo)致部分成像單元處于截止?fàn)顟B(tài),所以輸出圖象就會(huì)形成一個(gè)U形的陰影(圖2b)。當(dāng)物體振動(dòng)時(shí),在任何時(shí)刻物體的形態(tài)都被以這種方式記錄下來了。光電三極管分布越密,分辨率就越高。
2.2 圖象采集卡
攝像頭傳送過來的電信號(hào)與計(jì)算機(jī)之間的接口是圖象采集卡。本系統(tǒng)所使用的圖象采集卡為DH-VRT-CG200圖象卡,是一種基于PCI總線的高速彩色圖象采集卡。該卡輸入彩色視頻信號(hào)經(jīng)過數(shù)字解碼器、模數(shù)轉(zhuǎn)換器和色空變換等處理,通過PCI 總線傳送到計(jì)算機(jī)上的VGA卡實(shí)時(shí)顯示,同時(shí)還能將數(shù)據(jù)送到內(nèi)存實(shí)時(shí)存儲(chǔ),以便作進(jìn)一步的數(shù)據(jù)處理。數(shù)據(jù)的傳送是由采集卡自身控制的,無須CPU的參與。其傳送速度可以達(dá)到40MB/s,每秒可傳送24幅清晰的圖像。
3 系統(tǒng)的軟件構(gòu)成
3.1 與圖象采集卡有關(guān)的函數(shù)
由于圖象數(shù)據(jù)是采集卡直接送到內(nèi)存的,所以必須有配套的庫函數(shù)來進(jìn)行這方面的處理。主要的庫函數(shù)包括圖象卡的調(diào)用,圖象參數(shù)的選擇和內(nèi)存的申請(qǐng)與釋放。通過這些庫函數(shù)的調(diào)用,我們可以很方便地選擇一定的色空格式將圖象數(shù)據(jù)送到指定的內(nèi)存塊去。
3.2 關(guān)于圖像提取的算法
3.2.1 動(dòng)態(tài)分塊濾波算法
由于從攝像機(jī)傳送過來的數(shù)據(jù)是物體及其周圍環(huán)境的真實(shí)反映,所以存在著各種外在的干擾。即使在實(shí)驗(yàn)中盡量改善測(cè)量環(huán)境,如讓與待分析振動(dòng)無關(guān)的物體(如支撐物等)不要進(jìn)入圖象,增加光線照射的強(qiáng)度,來減少物體自身投影的影響。但是有用信號(hào)中混有的干擾信號(hào)總是無法完全消除的。因此,在對(duì)原始圖象進(jìn)行識(shí)別處理之前,必須將上述的干擾因素排除,也就是要先對(duì)原始采樣信號(hào)進(jìn)行濾波。由于干擾信號(hào)的存在具有隨機(jī)性,所以本系統(tǒng)設(shè)計(jì)了“動(dòng)態(tài)分區(qū)濾波”的方法來進(jìn)行處理。該方法的具體算法如下:第一步,將整個(gè)圖象區(qū)用十字形劃分為四塊B1、B2、B3和B4,如圖3所示。
 ?
? 
然后通過下面的公式求出每塊的平均灰度值H1、H2、H3和H4。其中H的上標(biāo)(0)代表第零次分區(qū),以下上標(biāo)意義與此相同。

再將每一個(gè)分塊按上述方法分成四等份B11、B12、B13和B14,這樣就把噪音信號(hào)進(jìn)行“分而濾之”的處理,如圖4所示。
利用類似的公式對(duì)每小塊求出塊平均灰度值H11、H12、H13和H14。

然后將這四個(gè)灰度值和母分區(qū)灰度值H1作比較,定義如下控制量:

可以重復(fù)以上的步驟,直到控制量δ小于某一指定值,可以認(rèn)為在此時(shí)的每一小塊中所出現(xiàn)的灰度值奇異點(diǎn)為干擾信號(hào)。這樣,就能用當(dāng)前的塊灰度平均值代替塊中的各點(diǎn)灰度值,從而也就到達(dá)了濾去噪音信號(hào)的目的。
3.2.2 二值化算法
濾波以后,就可以對(duì)圖象進(jìn)行二值化處理了。二值化算法的核心在于如何獲得一個(gè)良好的灰度閾值,使得圖象的二值化處理能達(dá)到最佳效果。如果該閾值選得過亮,那么圖象就會(huì)在物體本身之外產(chǎn)生許多黑斑,達(dá)不到分辨的目的;如果該閾值選得過暗,又會(huì)使待測(cè)物體的外形變小,導(dǎo)致數(shù)據(jù)失真。為了對(duì)圖象進(jìn)行更好的提取,必須選擇一個(gè)較好的閾值自動(dòng)選擇算法。在計(jì)算機(jī)顯示器上,每個(gè)像素的顏色有R,G,B三部分構(gòu)成,當(dāng)R=G=B=255時(shí),該點(diǎn)為白色,也就是對(duì)應(yīng)為亮點(diǎn);當(dāng)R=G=B=0時(shí)該點(diǎn)為黑色,也就是對(duì)應(yīng)為暗點(diǎn)。由于圖象是黑白的,所以對(duì)于同一點(diǎn),其R,G,B的值大致相同,首先將屏幕上每個(gè)像素的R值讀到一個(gè)二維矩陣R[i][j]中,由于實(shí)驗(yàn)背景選定為白色,而且已經(jīng)對(duì)圖象進(jìn)行了濾波處理,因此得到的圖象點(diǎn)的R值的分布應(yīng)該是在振動(dòng)物體的位置上有個(gè)突起的峰(谷),而其他位置上變化應(yīng)該很平滑。所以通過對(duì)這i×j個(gè)值求平均值得到Ravi作為原始閾值是具有分辨能力的。通過實(shí)驗(yàn),在此閾值控制下,圖象的二值化效果一般能夠滿足要求。為了進(jìn)行彌補(bǔ),系統(tǒng)另外設(shè)置了人工控制的模式。也就是在閾值附近通過手動(dòng)控件進(jìn)行調(diào)整,并隨時(shí)監(jiān)控圖象處理的結(jié)果,直到滿意為止。
3.2.3 圖象線化處理算法
該算法的主要目的就是從圖象中提取到可以進(jìn)行后處理的數(shù)據(jù)。首先按列找到二值化處理后圖象的陰影上、下邊沿,按著兩個(gè)邊沿?cái)?shù)據(jù)求一個(gè)平均值Yavi[i]。將這些值看成是一維振動(dòng)結(jié)構(gòu)的中心線,在忽略物體材料的微小不均勻性的情況下,該曲線的形態(tài)就能認(rèn)為是物體的振動(dòng)形態(tài)。如圖5所示。

將這些數(shù)據(jù)存儲(chǔ)到文件中,準(zhǔn)備進(jìn)行參數(shù)求解和分析。由于顯示器的最小單位是像素,所以在求取Yi(avi)時(shí)必須用整型數(shù)據(jù)進(jìn)行運(yùn)算。這樣在所得到的中心線上會(huì)出現(xiàn)一些不光滑的地方。對(duì)此系統(tǒng)將數(shù)據(jù)讀到分析模塊中時(shí),采用了線性插值和二次曲線插值的方法來進(jìn)行平滑處理,獲得了良好的效果。
3.2.4 振動(dòng)參數(shù)分析的算法
通過上述各步驟的圖象處理工作,可以獲得結(jié)構(gòu)(如橫梁)上的任意點(diǎn)的X(k)采樣函數(shù)。參數(shù)分析的基本算法就是對(duì)X(k)進(jìn)行離散傅立葉變換,并在頻域內(nèi)進(jìn)行分析處理。通過對(duì)幅值/相位圖的分析,就能得到各階振型的頻率和其它所需要的各種參數(shù)。這個(gè)模塊的功能通過調(diào)用Matlab庫函數(shù)和編程來實(shí)現(xiàn)。
4 對(duì)系統(tǒng)的測(cè)試和結(jié)果
試件采用圖1(a)所示的一維振動(dòng)結(jié)構(gòu),其具體結(jié)構(gòu)如圖6所示。

用本系統(tǒng)對(duì)其振型作了鑒定性的測(cè)量和分析。所使用的待測(cè)物體的材料為有機(jī)玻璃,總長為110cm,寬度為5cm,厚度為0.4cm。攝像頭垂直照射在厚度方向上。由于采用的采集卡的采集速度為24幅/秒,所以在該試件上加上兩個(gè)質(zhì)量適當(dāng)?shù)捻来a作為配重來減緩振動(dòng)頻率。根據(jù)振動(dòng)理論,如果改變配重M1和M2的質(zhì)量,或者改變長度a和b的值(見圖1)都會(huì)引起各階振型所對(duì)應(yīng)的頻率發(fā)生移動(dòng)。因此,在改變這些參數(shù)的條件下進(jìn)行了大量的數(shù)據(jù)采集與分析實(shí)驗(yàn)。選取了兩張有代表性的頻譜曲線進(jìn)行比較。如圖7、圖8所示。
 ?
?
在上述兩張頻譜圖上,可以清晰地看到一階振型和二階振型所對(duì)應(yīng)的頻率發(fā)生了移動(dòng)。而且經(jīng)過計(jì)算可以發(fā)現(xiàn)兩張圖上頻率比值也發(fā)生了變化。這正是由于改變了配重M1和M2在待測(cè)物體上的位置,根據(jù)振動(dòng)理論,必然會(huì)發(fā)生這種現(xiàn)象。由此也就間接地證明了本系統(tǒng)的可用性。還通過建立初步數(shù)學(xué)模型并結(jié)合振動(dòng)理論的方法進(jìn)行了一些估算,其結(jié)果也與實(shí)驗(yàn)結(jié)果相吻合。
5 系統(tǒng)改進(jìn)和進(jìn)一步的工作
本系統(tǒng)達(dá)到了精確、高效的目的。有待改進(jìn)的問題是:首先,由于所采用的攝像頭的采樣頻率為電視頻率,所以在振動(dòng)頻率高于2Hz時(shí)會(huì)出現(xiàn)圖象嚴(yán)重模糊,這就對(duì)圖象提取的算法提出了很高的甚至是不可達(dá)到的要求。為了使本系統(tǒng)能適用于高頻分析,必須采用采集速度更快的圖像采集卡。其次,通過上面兩張頻譜圖看到高階振型的頻率的譜功率相當(dāng)?shù)奈⑿。灾翈缀鯚o法發(fā)現(xiàn)。為了解決這個(gè)問題,一方面可以通過提高攝像頭的分辨率的途徑,使得隱藏在噪音信號(hào)中的小幅值高階振型能夠較好地分辨出來;同時(shí)還可以通過使用激振器進(jìn)行激勵(lì)以及改進(jìn)圖像處理的算法等方法來加以改善。在這些改進(jìn)的基礎(chǔ)上,這種基于計(jì)算機(jī)圖象處理的振動(dòng)測(cè)量和分析方法將有很廣闊的應(yīng)用前景。
對(duì)于一維結(jié)構(gòu)進(jìn)行了大量的測(cè)量和分析實(shí)驗(yàn),已經(jīng)取得了較好的結(jié)果。還要針對(duì)二維面結(jié)構(gòu)進(jìn)行測(cè)量分析。主要設(shè)想是利用現(xiàn)有分析一維結(jié)構(gòu)的結(jié)果,通過在面結(jié)構(gòu)上畫線條,或者打光柵的方法,實(shí)現(xiàn)將二維結(jié)構(gòu)一維化來進(jìn)行測(cè)量和分析。具體結(jié)果將在后續(xù)的文章中介紹。
參考文獻(xiàn)
1 倪振華.振動(dòng)力學(xué).西安:西安交通大學(xué)出版社,1989
2 圖像處理技術(shù).上海:上海交通大學(xué)出版社,1988