
引言
LED廣告牌是一種面向公眾的信息顯示終端,有著非常廣泛的民用和商用價(jià)值。而現(xiàn)在大多數(shù)LED廣告牌顯示的信息都是事先固化在系統(tǒng)中的,這失去了信息的實(shí)時(shí)性,特別不方便用戶更換顯示內(nèi)容;少數(shù)LED廣告牌采用與微機(jī)直接相連,用微機(jī)來(lái)傳送信息,這種系統(tǒng)解決了信息刷新問(wèn)題,但由于有線連接,制約了系統(tǒng)放置的隨意性,特別是對(duì)于面向多地區(qū)多客戶的廣告公司來(lái)說(shuō),給系統(tǒng)的實(shí)時(shí)更新和維護(hù)帶來(lái)了許多不便。文提出了通過(guò)手持發(fā)射機(jī)遙控LED廣告牌的新方案,實(shí)現(xiàn)了對(duì)廣告牌內(nèi)容及顯示方式的靈活改變,使用非常方便。該方案以PC機(jī)為上位機(jī),發(fā)射機(jī)和接收機(jī)均以單片機(jī)為核心,具有較高的性能價(jià)格比。
1 、系統(tǒng)方案
1.1 無(wú)線遙控方式
無(wú)線遙控是指實(shí)現(xiàn)對(duì)被控目標(biāo)的非接觸遙遠(yuǎn)控制,在工業(yè)控制、航空航天、家電領(lǐng)域應(yīng)用廣泛。無(wú)線遙控和無(wú)線傳輸系統(tǒng)與有線和紅外設(shè)備相比提高了移動(dòng)自由度。由此使無(wú)線遙控裝置和無(wú)線傳輸系統(tǒng)在工業(yè)領(lǐng)域的應(yīng)用越來(lái)越多。相對(duì)電纜連線的優(yōu)點(diǎn)在于安裝成本低(無(wú)需布線、不用地下工程、沒(méi)有電纜槽),提高了靈活性并降低了維護(hù)成本。
要想達(dá)到遙控的目的,就必須通過(guò)無(wú)線傳輸將需要顯示的信息和控制命令傳送到顯示終端LED屏上。常用的無(wú)線傳輸方式有:聲波(超聲波),光波(紅外線)和電波。考慮到電波傳輸具有以下優(yōu)點(diǎn):
1)傳輸距離比另兩者遠(yuǎn)得多;
2)可用的元器件種類豐富,性能也很好,價(jià)格便宜;
3)技術(shù)更為成熟。
因此,本系統(tǒng)采用電波傳輸。即信息在手持發(fā)射機(jī)和接收機(jī)之間,靠無(wú)線電波傳送。
高頻無(wú)線發(fā)射及接收模塊的性能直接影響到遙控距離與通信質(zhì)量,經(jīng)過(guò)多方調(diào)查論證,本系統(tǒng)采用一體化發(fā)射、接收模塊。它的主要優(yōu)點(diǎn)是頻率一致性好,免調(diào)試。
1.2 數(shù)據(jù)編碼方式
數(shù)據(jù)編碼是指把需要加工處理的數(shù)據(jù)庫(kù)信息,用特寫的數(shù)字來(lái)表示的一種技術(shù),是根據(jù)一定數(shù)據(jù)結(jié)構(gòu)和目標(biāo)的定性特征,將數(shù)據(jù)轉(zhuǎn)換為代碼或編碼字符,在數(shù)據(jù)傳輸中表示數(shù)據(jù)組成,并作為傳送、接受和處理的一組規(guī)則和約定。由于計(jì)算機(jī)要處理的數(shù)據(jù)信息十分龐雜,有些數(shù)據(jù)庫(kù)所代表的含義又使人難以記憶。為了便于使用,容易記憶,常常要對(duì)加工處理的對(duì)象進(jìn)行編碼,用一個(gè)編碼符合代表一條信息或一串?dāng)?shù)據(jù)。對(duì)數(shù)據(jù)進(jìn)行編碼在計(jì)算機(jī)的管理中非常重要,可以方便地進(jìn)行信息分類、校核、合計(jì)、檢索等操作。因此,數(shù)據(jù)編碼就成為計(jì)算機(jī)處理的關(guān)鍵。即不同的信息記錄應(yīng)當(dāng)采用不同的編碼,一個(gè)碼點(diǎn)可以代表一條信息記錄。人們可以利用編碼來(lái)識(shí)別每一個(gè)記錄,區(qū)別處理方法,進(jìn)行分類和校核,從而克服項(xiàng)目參差不齊的缺點(diǎn),節(jié)省存儲(chǔ)空間,提高處理速度。
信源的編碼和譯碼在無(wú)線通信中是至關(guān)重要的,它可以提高信號(hào)傳輸?shù)目煽啃院陀行浴V告牌是置于戶外的,其干擾源很多。所以,在本系統(tǒng)的設(shè)計(jì)中,編碼、解碼的可靠性和抗干擾性是設(shè)計(jì)成敗的關(guān)鍵。
本系統(tǒng)從無(wú)線通信理論入手,對(duì)編碼解碼技術(shù)及其對(duì)系統(tǒng)的影響做了深入的研究,經(jīng)反復(fù)比較,最后選用適合本系統(tǒng)的編碼解碼專用芯片。該模塊還利用碼分多址技術(shù)進(jìn)行數(shù)據(jù)編碼解碼,最多可提供531441(312)個(gè)地址碼,可以徹底消除任何碼址沖突和非授權(quán)編碼數(shù)據(jù)的干擾。
1.3 圖像點(diǎn)陣抽取和移動(dòng)算法
圖像點(diǎn)陣的抽取是利用算法計(jì)算出在圖像源數(shù)據(jù)庫(kù)中的偏移地址,從而取出相應(yīng)的點(diǎn)陣數(shù)據(jù),生成新的顯示數(shù)據(jù)。抽取算法的正確與否直接關(guān)系到顯示圖像的正確性。
而圖像移動(dòng)則是利用算法計(jì)算出下一幀數(shù)據(jù)在顯示點(diǎn)陣數(shù)據(jù)庫(kù)中應(yīng)疊加的偏移地址。移動(dòng)算法的正確與否直接關(guān)系到動(dòng)態(tài)圖像或者文字與背景的同步性和現(xiàn)場(chǎng)效果,特別是對(duì)于彩色顯示屏尤為重要。
1.4 系統(tǒng)框圖
整個(gè)系統(tǒng)由三個(gè)相對(duì)獨(dú)立的子系統(tǒng)組成,即上位機(jī)、手持發(fā)射機(jī)、接收機(jī)和顯示屏系統(tǒng)。其結(jié)構(gòu)框圖如圖1所示。
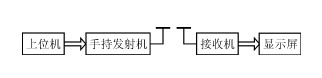
圖1 系統(tǒng)總體結(jié)構(gòu)框圖
上位機(jī)的任務(wù)是完成顯示信息的錄入和編輯,再經(jīng)過(guò)點(diǎn)陣抽取和移動(dòng)算法將顯示信息轉(zhuǎn)換為LED顯示屏對(duì)應(yīng)的點(diǎn)陣數(shù)據(jù),并通過(guò)PC機(jī)的串行口將點(diǎn)陣數(shù)據(jù)轉(zhuǎn)存到手持發(fā)射機(jī)中。
手持發(fā)射機(jī)的作用是將上位機(jī)傳來(lái)的點(diǎn)陣數(shù)據(jù)和面板鍵盤上接收到的命令經(jīng)編碼、調(diào)制后,以碼分多址通信方式轉(zhuǎn)發(fā)給戶外的用戶群,并可現(xiàn)場(chǎng)設(shè)置和調(diào)試顯示屏的顯示格式。
接收機(jī)將接收到的高頻信號(hào)經(jīng)放大整形、解調(diào)譯碼后,再并行輸出給單片機(jī),由單片機(jī)對(duì)接收數(shù)據(jù)進(jìn)行識(shí)別、轉(zhuǎn)存,實(shí)時(shí)改變顯示方式和顯示內(nèi)容,并驅(qū)動(dòng)LED顯示屏。
2、硬件配置
系統(tǒng)硬件主要有三大部分,即上位機(jī)、手持發(fā)射機(jī)、接收機(jī)和顯示模塊。
2.1上位機(jī)
上位機(jī)是指人可以直接發(fā)出操控命令的計(jì)算機(jī),一般是PC,屏幕上顯示各種信號(hào)變化(液壓,水位,溫度等)。下位機(jī)是直接控制設(shè)備獲取設(shè)備狀況的計(jì)算機(jī),一般是PLC/單片機(jī)之類的。上位機(jī)發(fā)出的命令首先給下位機(jī),下位機(jī)再根據(jù)此命令解釋成相應(yīng)時(shí)序信號(hào)直接控制相應(yīng)設(shè)備。標(biāo)準(zhǔn)應(yīng)用軟件豐富,接口有很強(qiáng)的通用性,基于PC機(jī)的程序有很強(qiáng)的兼容性和可移植性,性價(jià)比高。
由于上位機(jī)系統(tǒng)要完成顯示信息(圖像和文字)的錄入、編輯及動(dòng)畫效果設(shè)計(jì),因此,除了中心PC機(jī)外還必須配備相應(yīng)的輸入外設(shè),例如掃描儀、攝像頭、鍵盤等。網(wǎng)絡(luò)(INTERNET)接口也是必不可少的,這樣可以實(shí)現(xiàn)信息的遠(yuǎn)程下載和廣告系統(tǒng)的網(wǎng)絡(luò)化管理。
上位機(jī)系統(tǒng)的組成如圖2所示。
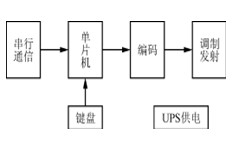
圖2 上位機(jī)系統(tǒng)配置框圖
2.2 手持發(fā)射機(jī)
發(fā)射機(jī)由單片機(jī)、鍵盤、編碼器、發(fā)射器、串行通信接口和UPS供電系統(tǒng)組成,其結(jié)構(gòu)框圖如圖3所示。
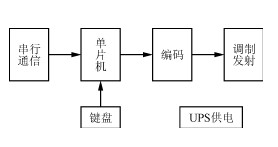
圖3 發(fā)射機(jī)結(jié)構(gòu)框圖
單片機(jī)的作用是將PC機(jī)傳來(lái)的圖像點(diǎn)陣或自身EPROM中的圖像點(diǎn)陣暫存在發(fā)射緩沖區(qū)RAM中,再根據(jù)鍵盤的命令串行發(fā)送至編碼器。
單片機(jī)選用的是ATMEL公司的89S52,該芯片運(yùn)算速度較快,性能穩(wěn)定,且價(jià)格便宜。
鍵盤用于設(shè)定圖像移動(dòng)速度、顯示模式和發(fā)射的通信協(xié)議。
編碼器是本系統(tǒng)的關(guān)鍵部件之一,決定了通信的可靠性。該芯片的主要特點(diǎn)有CMOS技術(shù),低功耗,非常高的噪聲免疫性(多幀同步),最多12位3態(tài)地址引腳(最多可提供312個(gè)地址碼),最多6位數(shù)據(jù)引腳,大范圍的工作電壓,單電阻振蕩器,輸出形式可設(shè)為鎖存或瞬態(tài)。
發(fā)射器的作用是將編碼后的數(shù)字信號(hào)調(diào)制到高頻載波上,再經(jīng)功率放大后發(fā)射出去,它決定了手持發(fā)射機(jī)的無(wú)線遙控距離。本系統(tǒng)選用了調(diào)制、驅(qū)動(dòng)和發(fā)射一體化模塊。該模塊采用聲表諧振器穩(wěn)頻,SMT樹脂封裝,頻率一致性較好,免調(diào)試,特別適合多發(fā)多收無(wú)線遙控及數(shù)據(jù)傳輸系統(tǒng)。而一般的LC振蕩器頻率穩(wěn)定度及一致性較差,即使采用高品質(zhì)微調(diào)電容,溫差變化及振動(dòng)也很難保證已調(diào)好的頻點(diǎn)不會(huì)發(fā)生偏移。
采用UPS供電是為了保證手持發(fā)射機(jī)在戶外工作時(shí),發(fā)射緩沖區(qū)RAM中的數(shù)據(jù)不丟失。因?yàn)椋l(fā)射緩沖區(qū)需要暫存的圖像點(diǎn)陣數(shù)據(jù)量很大,若采用超大容量的非易失性存儲(chǔ)器,如E2PROM,F(xiàn)LASH及FRAM等,不僅成本高,而且采購(gòu)困難,所以系統(tǒng)選用了普通RAM作為緩沖寄存器。
2.3 接收機(jī)和顯示模塊
接收機(jī)是一個(gè)具有如下組成的電路系統(tǒng):天線,濾波器,放大器,A/D轉(zhuǎn)換器。GPS衛(wèi)星發(fā)送的導(dǎo)航定位信號(hào),是一種可供無(wú)數(shù)用戶共享的信息資源。對(duì)于陸地、 海洋和空間的廣大用戶,只要用戶擁有能夠接收、跟蹤、變換和測(cè)量GPS信號(hào)的接收設(shè)備, 即GPS信號(hào)接收機(jī),就可以在任何時(shí)候用GPS信號(hào)進(jìn)行導(dǎo)航定位測(cè)量。
接收機(jī)和顯示模塊由接收器、譯碼器、單片機(jī)、顯示驅(qū)動(dòng)、LED屏及供電系統(tǒng)組成,其結(jié)構(gòu)框圖如圖4所示。
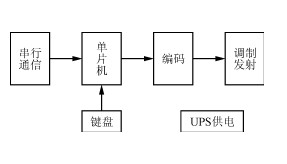
圖4 接收機(jī)結(jié)構(gòu)框圖
接收器將接收到的高頻信號(hào)經(jīng)放大整形后解調(diào)出數(shù)字編碼信號(hào)。我們選用了與發(fā)射模塊相對(duì)應(yīng)的接收解調(diào)一體化模塊。單頻接收機(jī)。單頻接收機(jī)只能接收L1載波信號(hào),測(cè)定載波相位觀測(cè)值進(jìn)行定位。由于不能有效消除電離層延遲影響,單頻接收機(jī)只適用于短基線(《15km)的精密定位。2、雙頻接收機(jī)。雙頻接收機(jī)可以同時(shí)接收L1,L2載波信號(hào)。利用雙頻對(duì)電離層延遲的不一樣,可以消除電離層對(duì)電磁波信號(hào)的延遲的影響,因此雙頻接收機(jī)可用于長(zhǎng)達(dá)幾千公里的精密定位。該系列模塊采用超外差、二次變頻技術(shù),并將所有的射頻接收、混頻、濾波、數(shù)據(jù)解調(diào)、放大整形電路全部集成在模塊內(nèi),功能高度集成化,免去射頻頻率調(diào)試及超再生接收電路的不穩(wěn)定性,具有可靠性高、頻率穩(wěn)定、接收頻率免調(diào)試等特點(diǎn)。
譯碼器將數(shù)字編碼信號(hào)譯碼,再并行輸出給單片機(jī)。我們選用的是與編碼相對(duì)應(yīng)的碼分多址串行解碼專用芯片。
單片機(jī)負(fù)責(zé)接收數(shù)據(jù)的識(shí)別、保存、顯示方式轉(zhuǎn)換。單片機(jī)選用了ATMEL公司的89S52,通用性好,性價(jià)比高。
顯示模塊用于顯示廣告信息。該模塊包括LED顯示屏和顯示驅(qū)動(dòng)板,自帶顯示緩沖區(qū),并以動(dòng)態(tài)掃描方式驅(qū)動(dòng)LED顯示屏,具有功耗低、亮度大等特點(diǎn)。
接收顯示系統(tǒng)的供電電源沒(méi)有特殊要求,但要留有相當(dāng)裕量并注意通風(fēng)散熱,因?yàn)椋芏郘ED廣告牌引起的火災(zāi)都是由于供電系統(tǒng)造成的。
3、軟件結(jié)構(gòu)
本系統(tǒng)的軟件主要由三大模塊組成,即上位機(jī)主控程序、發(fā)射機(jī)主控程序和接收機(jī)主控程序。
3.1 上位機(jī)主控程序
上位機(jī)主控程序?qū)嶋H上包括顯示信息生成程序、顯示點(diǎn)陣轉(zhuǎn)換程序和串口通信程序,是三大主控程序中結(jié)構(gòu)最復(fù)雜的一部分。
顯示信息生成程序完成顯示圖像和文字的錄入、編輯及動(dòng)畫效果設(shè)計(jì)。該程序首先采用DOS平臺(tái)下的主控程序與底層通信軟件結(jié)合,通過(guò)串行及并行通信口完成用戶對(duì)源文件、INTERNET接口及其他輸入設(shè)備的多參數(shù)錄入。
顯示點(diǎn)陣轉(zhuǎn)換程序就是將生成的顯示信息通過(guò)點(diǎn)陣抽取和移動(dòng)算法將顯示信息轉(zhuǎn)換為L(zhǎng)ED顯示屏對(duì)應(yīng)的點(diǎn)陣數(shù)據(jù)。對(duì)于彩色顯示屏,需要將圖像信息的RGB三基色數(shù)據(jù)分別抽樣,并分塊存儲(chǔ)、順序轉(zhuǎn)發(fā);對(duì)于連續(xù)的動(dòng)畫圖像,要按幀分別計(jì)算偏移量,關(guān)鍵是背景圖像與動(dòng)畫文字要同步。該部分的軟件是在TURBOC3.0的環(huán)境下編寫的。
串口通信程序則較為簡(jiǎn)單,附屬于點(diǎn)陣轉(zhuǎn)換程序中。
限于篇幅和技術(shù)原因,這里僅以PC機(jī)漢字抽取發(fā)送程序?yàn)槔瑪⑹銎湓砗徒Y(jié)構(gòu)。
設(shè)終端顯示屏所顯示的是16×16的漢字點(diǎn)陣。所以,要想在終端上顯示廣告信息,必須將該信息所包含的漢字的點(diǎn)陣數(shù)據(jù)傳到終端上。在TURBOC3.0中,將漢字賦值給一個(gè)變量時(shí),實(shí)際上是將該漢字的區(qū)位碼賦值給這個(gè)變量。每個(gè)漢字都是16×16的點(diǎn)陣,筆劃經(jīng)過(guò)的地方為“1”,其余為“0”。這樣,按從上到下,從左到右的順序,一個(gè)漢字由256個(gè)點(diǎn)組成,也就是32個(gè)字節(jié)。漢字按區(qū)位碼的順序排列在漢字字庫(kù)中,區(qū)碼為行,位碼為列,一區(qū)有94位。這樣,某漢字在漢字庫(kù)中的偏移地址為(區(qū)碼×94+位碼)×32.取出后的32字節(jié)漢字點(diǎn)陣,經(jīng)由PC機(jī)的串行口送入到發(fā)射機(jī)中。其流程如圖5所示。
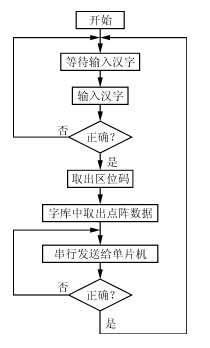
圖5 PC機(jī)軟件流程圖
3.2 發(fā)射機(jī)主控程序
發(fā)射機(jī)主控軟件的功能是通過(guò)串行口接收上位PC機(jī)發(fā)送來(lái)的圖像點(diǎn)陣,讀取鍵盤命令,并向編碼器串行發(fā)送操作命令或顯示數(shù)據(jù)。
該部分的軟件是在KeilC51環(huán)境下編寫的,它可以將C語(yǔ)言直接翻譯成匯編語(yǔ)言,生成二進(jìn)制碼寫入單片機(jī),這樣編寫效率高一些。串行口觸發(fā),則表明PC機(jī)有圖像點(diǎn)陣數(shù)據(jù)傳來(lái),單片機(jī)立即接收點(diǎn)陣數(shù)據(jù)存于RAM中;當(dāng)INT0觸發(fā),表明鍵盤有動(dòng)作,立即接收鍵值判斷命令的類別,并向接收機(jī)發(fā)送圖像點(diǎn)陣數(shù)據(jù)或者操作命令。其功能流程如圖6所示。
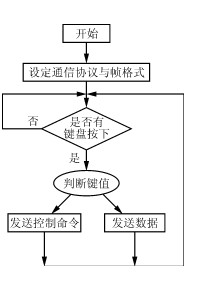
圖6 發(fā)射機(jī)主控程序流程
3.3 接收機(jī)主控程序
該部分軟件的功能是完成對(duì)接收數(shù)據(jù)的識(shí)別、存儲(chǔ)、變換和顯示驅(qū)動(dòng),并可實(shí)現(xiàn)本地本機(jī)的自檢,顯示固化圖像。當(dāng)接收裝置的譯碼芯片有輸出時(shí),單片機(jī)就中斷當(dāng)前的顯示,接收標(biāo)志字,然后判斷此標(biāo)志字的內(nèi)容,確定將接收的是圖像點(diǎn)陣,還是操作控制命令。若是點(diǎn)陣數(shù)據(jù),就將其連續(xù)接收存放到一個(gè)顯示緩沖數(shù)據(jù)庫(kù)中,按當(dāng)前的方式顯示。若是命令,則立刻改變顯示方式。
其中,關(guān)鍵的是圖像上、下、左、右移動(dòng)的實(shí)時(shí)實(shí)現(xiàn)。具體實(shí)現(xiàn)方法如下:
1)圖像的上下移動(dòng) ,直到一個(gè)圖像的移完為止;再移下一個(gè)圖像的點(diǎn)陣。上移的過(guò)程類似。
2)圖像的左右移動(dòng) 將一圖像的每一行數(shù)據(jù)向左移位(使用C語(yǔ)言的移位指令),將移位后的點(diǎn)陣存放于BUF之中,即可顯示。右移的過(guò)程類似。
接收機(jī)主控程序的功能流程如圖7所示。
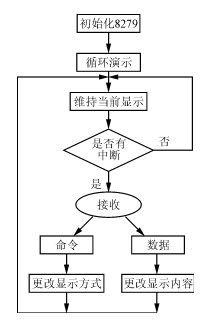
圖7 接收機(jī)主控程序流程
4 、性能測(cè)試
系統(tǒng)功能及參數(shù)測(cè)試結(jié)果如下:
1)圖像錄入功能 掃描儀、攝像頭、數(shù)碼相機(jī)、圖像源文件;
2)文字錄入功能 鍵盤、WORD/TEXT源文件;
3)動(dòng)畫設(shè)計(jì)功能 文字或圖形相對(duì)于背景移動(dòng)、縮放;
4)發(fā)射機(jī)設(shè)置功能 接收機(jī)序列號(hào)、圖像移動(dòng)命令、自檢命令、發(fā)射命令;
5)接收機(jī)自檢功能 顯示藍(lán)草坪背景和“歡迎光臨”移動(dòng)字符;
6)發(fā)射機(jī)待機(jī)時(shí)間 ≥120h;
7)發(fā)射機(jī)遙控距離 ≥250m;
8)發(fā)射機(jī)緩存空間 8MByte;
9)LED顯示屏 320×640DIP;
10)接收顯示系統(tǒng)功耗 ≤4kW.
5、 結(jié)語(yǔ)
整機(jī)性能測(cè)試及鑒定結(jié)論如下:
1)通過(guò)手持發(fā)射機(jī)遙控LED廣告牌,方案新穎,實(shí)用性強(qiáng),具有較高的市場(chǎng)推廣價(jià)值;
2)硬件配置科學(xué),性能穩(wěn)定,性價(jià)比高;
3)軟件結(jié)構(gòu)合理,功能強(qiáng)大,使用方便。