
摘 要:介紹了MK95 卷煙機(jī)PID 重量控制系統(tǒng)的結(jié)構(gòu),對其控制原理進(jìn)行了分析:重量信號的檢測、控制過程、削減盤電機(jī)速度控制、數(shù)字PID 控制算法的實現(xiàn)、PID 參數(shù)選擇。同時還論述了系統(tǒng)定標(biāo)及校正問題。通過對現(xiàn)場采集數(shù)據(jù)分析,采用PLC 控制器的PID 控制算法實現(xiàn)的煙支重量控制系統(tǒng),硬件設(shè)計簡單,可在線調(diào)整參數(shù),系統(tǒng)響應(yīng)速度快,控制準(zhǔn)確可靠,完全可替代原模擬重量控制系統(tǒng)。
關(guān)鍵詞: 卷煙機(jī);重量控制;PLC;PID 算法
傳統(tǒng)的MK95 卷煙機(jī)煙支重量控制系統(tǒng)采用的主要是模擬線路板控制,為此我們設(shè)計了卷煙重量PID 控制系統(tǒng)。通過PLC 運(yùn)用PID 算法實現(xiàn)的煙支重量控制系統(tǒng),具有響應(yīng)速度快、調(diào)節(jié)平穩(wěn)、性能可靠、維修方便等優(yōu)點,完全可以替代傳統(tǒng)重量控制系統(tǒng)。
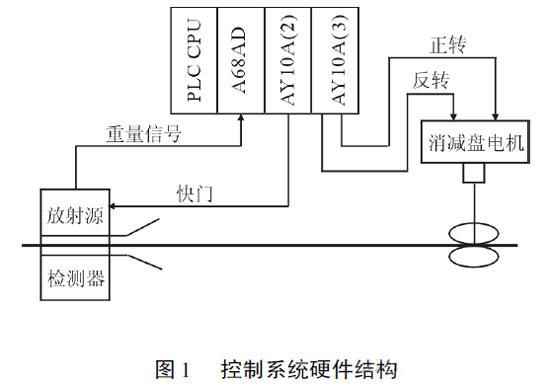
1 系統(tǒng)硬件結(jié)構(gòu)
卷煙機(jī)PID 重量控制系統(tǒng)硬件結(jié)構(gòu)如圖1 所示,主要包括煙支重量檢測、煙支重量信號處理及電控系統(tǒng)、執(zhí)行機(jī)構(gòu)三大部分組成。其中煙支重量檢測由核掃描器、信的原理,當(dāng)核掃描器射線穿過煙條時射線衰減,從而射線衰減量與煙支重量就存在一定的對應(yīng)關(guān)系,通過射線衰減量就能夠測得煙支重量。射線衰減量通過核掃器內(nèi)電離室轉(zhuǎn)變?yōu)殡娦盘枺鶕?jù)檢測器的輸出電壓信號可獲得相應(yīng)的煙支重量信號。其轉(zhuǎn)換公式為:
F =Klg(V/V0 )
F:電壓V 對應(yīng)煙支重量;K:比例系數(shù);V:有煙支時檢測器的輸出電壓;V0 :無煙支時檢測器的輸出電壓。
2.2 控制過程
放射源檢測器輸出的電壓信號由A68AD 模塊轉(zhuǎn)換成數(shù)字量,控制程序?qū)y量值與煙支重量的目標(biāo)值進(jìn)行比較,經(jīng)過PID 控制算法運(yùn)算再去控制煙支重量。
2.3 削減盤電機(jī)速度控制
由于卷煙吸味及卷煙質(zhì)量的要求,每支卷煙的煙支重量分布并不均勻,通常兩端煙絲密度大,中間煙絲密度小,因此控制煙支密度分布的削減盤電機(jī)需要不停的加號處理及電控系統(tǒng)由PLC減速轉(zhuǎn)動,以控制削減盤的上下移動。此外,在卷煙機(jī)的工作過程中,煙支重量(煙條密度) 的變化取決于卷煙機(jī)風(fēng)室供絲量和削減盤的位置等,當(dāng)煙支重量偏重或偏輕時,削減盤電機(jī)控制削減盤向下或向上移位,以增加或削減供絲量;當(dāng)煙支重量在設(shè)定的正常區(qū)間時,削減盤基本上在平穩(wěn)的上下移動,以實現(xiàn)煙支重量控制及密度分布控制的目的。此外,由于在測控系統(tǒng)中,無論開環(huán)還是閉環(huán)控制,都要考慮伺服機(jī)構(gòu)的啟動、停止或者運(yùn)動方向的加減速處理,以獲得平穩(wěn)的運(yùn)動和較高的位置控制精度,而梯形速度曲線具有計算比較簡單、響應(yīng)速度快、控制較為平穩(wěn)的優(yōu)點,所以本控制系統(tǒng)采用了梯形速度曲線控制。
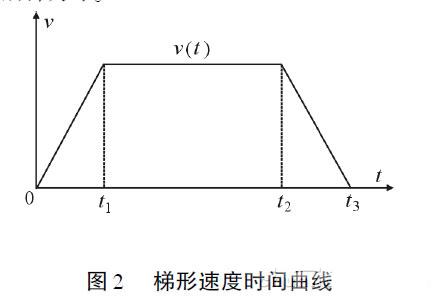
梯形速度曲線在時間上可以分為3 個階段:第一階段為加速運(yùn)動階段,電動機(jī)以規(guī)定的加速度a 加速到最大速度V;第二階段為勻速運(yùn)動階段,電動機(jī)以最大速度V 勻速運(yùn)動;第三階段為減速運(yùn)動階段,電動機(jī)以減速度-a減速到停止?fàn)顟B(tài)。
圖2 表示了梯形速度時間曲線。電機(jī)從時間t0 (坐標(biāo)原點) 開始運(yùn)行,直至運(yùn)行到時間t3 ,電機(jī)的運(yùn)動速度在運(yùn)動前后都為零。
(1) 加速區(qū)域
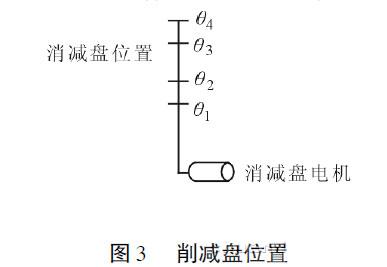
當(dāng)核掃描器測得煙支密度偏重時(此時削減盤電機(jī)對應(yīng)位置θ1 ),為了加快響度速度,電機(jī)以加速度a 運(yùn)轉(zhuǎn)時間t1 ,削減盤相應(yīng)運(yùn)行到位置θ2 (如圖2)。此時,
Δt1 =t1 =v/a,θ2 =v2 /2a。
(2) 恒速區(qū)域
此后,削減盤電機(jī)以最大速度v(t) 平穩(wěn)運(yùn)行時間(t2-t1 ),削減盤對應(yīng)位置θ3 ,此時(t2 ) 核掃描器測得煙支重
量已達(dá)到設(shè)定值下限。此時,
Δt2 =t2 -t1 =(θ3 -θ2 ) /v -v/a,θ3 =θ2 -v2 /a。
(3) 減速區(qū)域
當(dāng)核掃描器測得煙支重量已達(dá)到設(shè)定值下限時,電機(jī)由最大速度減速運(yùn)行,直至削減盤達(dá)到目標(biāo)位置θ4 ,電機(jī)停轉(zhuǎn)。此時,Δt3 =t3 -t2 =Δt1 ,θ4 =-v2 /2a。
(4) 速度控制
由此,可以根據(jù)上述幾組公式計算出相應(yīng)位置時刻的速度值并加以控制,當(dāng)實際檢測的位置值與位置指令不相等時,運(yùn)動控制器首先計算出偏差(指令值減實際值),然后根據(jù)位置偏差值進(jìn)行判斷,計算出速度指令值,最后進(jìn)行速度控制。
2.4 PID 控制算法
在本煙支重量控制系統(tǒng)中,將原來在模擬煙支重量控制系統(tǒng)中的硬件PID控制器實現(xiàn)的功能用軟件來代替,稱作數(shù)字PID 控制器,所形成的一套算法則稱作數(shù)字PID算法。數(shù)字PID 控制器與模擬PID 控制器相比,數(shù)據(jù)顯示直觀,參數(shù)修改方便,可以根據(jù)試驗和經(jīng)驗在線調(diào)整參數(shù),可以得到更好的控制性能。
在模擬調(diào)節(jié)系統(tǒng)中,PID 控制算法的模擬表達(dá)式為
u(t) =Kp e(t) +1Ti ∫e(t) +Td de(t)
dt (1)
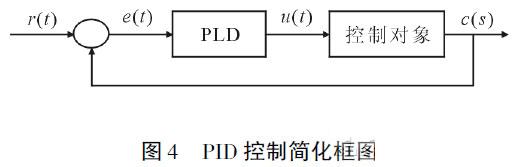
式中,Kp 為比例系數(shù);Ti 為積分時間常數(shù);Td 為微分時間常數(shù);e(t) 為偏差信號,等于給定量r(t) 與反饋量c(s) 之差;u(t) 為調(diào)節(jié)器的輸出信號。
其控制的簡化框圖如圖4 所示。
由于在PLC 控制系統(tǒng)中,只能根據(jù)采樣時刻的偏差值計算控制量,因此,為了使PLC 控制系統(tǒng)實現(xiàn)在模擬控制系統(tǒng)中式(1) 所表示的控制量,必須將其離散化。利用積分累加求和及一階后相差分近似可得離散后的數(shù)字
PID 表達(dá)式如下:
u(k) =Kp e(k) +KiΣk
i =0
e(i) +
kd (e(k) -e(k -1)) (2)
上式中,T 為采樣周期;e(k) 為系統(tǒng)的k 次采樣時刻的偏差值;e(k -1) 為系統(tǒng)的(k -1) 次采樣時刻的偏差值。如果采樣周期T 取得足夠小,該算式可以很好的逼近模擬PID 算式,因此,使被控過程與連續(xù)控制過程十分接近。上式就為離散化的位置式PID 控制算法的表達(dá)式。
同理,可得到第k -1 個采樣時刻的控制器輸出值:
u(k -1) =Kp e(k -1) +KiΣk -1
i =0
e(i) +
kd (e(k -1) -e(k -2)) (3)
2.5 PID 參數(shù)選擇
PID 調(diào)節(jié)器參數(shù)的選擇有2 種可用方法:理論設(shè)計法和試湊法。理論設(shè)計法要有被控對象的準(zhǔn)確的數(shù)學(xué)模型,這在實際中往往很難做到。本控制系統(tǒng)采用試湊法來確定控制參數(shù)。這種方法比較直觀,易于操作。調(diào)節(jié)時,根據(jù)PID 控制器各校正環(huán)節(jié)的作用來進(jìn)行,各校正環(huán)節(jié)的作用簡述如下:
1) 比例環(huán)節(jié)。增大比例系數(shù)Kp 將加快系統(tǒng)響應(yīng)速度,有利于減少靜態(tài)誤差;但是,過大的比例系數(shù)會使系統(tǒng)產(chǎn)生較大的超調(diào),并產(chǎn)生振蕩,破壞系統(tǒng)的穩(wěn)定性,本系統(tǒng)Kp 取值0.5。
2) 積分環(huán)節(jié)。增大積分常數(shù)Ti ,會有利于減小超調(diào),減小振蕩,但系統(tǒng)的靜態(tài)誤差的消除將隨之減慢,本系統(tǒng)Ti 采用1.2。
3) 微分環(huán)節(jié)。增大微分常數(shù)Td ,也可以加快系統(tǒng)響應(yīng),使超調(diào)量減小,穩(wěn)定性增加,但系統(tǒng)的抗干憂能力降低,本控制系統(tǒng)Td 取值為0.8。
3 系統(tǒng)定標(biāo)及校正
由于放射源探測器的響應(yīng)非線性及射線量與系統(tǒng)輸出信號的非線性關(guān)系等原因,煙支密度檢測系統(tǒng)存在非線性問題。系統(tǒng)非線性可通過理論預(yù)算和實驗預(yù)測得到,并通過系統(tǒng)定標(biāo)和曲線校正來消除或減小其對系統(tǒng)控制性能的最終影響。為使系統(tǒng)提供需代表煙條重量大小的脈沖信號同控制系統(tǒng)所需格式一致,使脈寬大小對應(yīng)煙條重量數(shù)據(jù),根據(jù)重量中心值和上下限值對脈沖寬度進(jìn)行定標(biāo)和數(shù)據(jù)調(diào)整。根據(jù)煙支重量檢測信號的中心值和上下限值來確定削減盤電機(jī)的運(yùn)轉(zhuǎn)中心點和上下限值,從而實現(xiàn)對煙支重量準(zhǔn)確控制。
4 系統(tǒng)應(yīng)用效果
本控制系統(tǒng)已完全應(yīng)用于濟(jì)南卷煙廠6 臺MK95 卷煙機(jī)組,通過近2 年來的使用看,效果很好,完全達(dá)到了原有控制系統(tǒng)的要求。我們在生產(chǎn)現(xiàn)場采集了大量的數(shù)據(jù),所有采集樣品均為84 mm 長度的卷煙。所取煙支樣品100支為一組,設(shè)定單支煙重為wi (i =1,2,?,n),則煙支平均重量為w0 = 1n Σni =1wi (4)
煙支重量偏差
Δwi =wi -w0
標(biāo)準(zhǔn)方差
δn -1 = 1 n -1Σni =1 (wi -w0 )2 (5)
變異系數(shù)
Cp =δn -1w0 ×100% (6)
檢測數(shù)據(jù)列入表1。
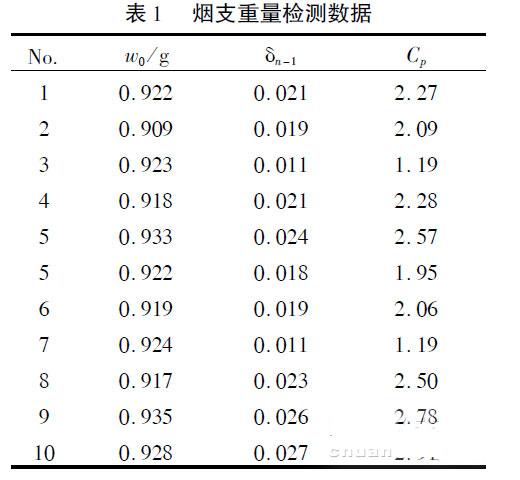
通過采集數(shù)據(jù)可以看出,采集數(shù)據(jù)標(biāo)準(zhǔn)偏差值較小,基本呈現(xiàn)正態(tài)分布,變異系數(shù)較小,煙支平均重量控制穩(wěn)定性較好。
5 系統(tǒng)的應(yīng)用前景
該系統(tǒng)由于采用PLC 控制器的PID 控制算法,系統(tǒng)硬件設(shè)計簡單,便于實現(xiàn)和維護(hù);根據(jù)不同的設(shè)備及車速可以試調(diào)PID 各參數(shù),十分方便快捷;同時,由于該系統(tǒng)響應(yīng)速度快,控制準(zhǔn)確可靠,完全可以實現(xiàn)對傳統(tǒng)模擬重理控制系統(tǒng)的替代。
參考文獻(xiàn):
[1] 許大中.交流電機(jī)調(diào)速理論[M].杭州:浙江大學(xué)出版社,1991暢
[2] 易繼鍇,江祥賢.電氣傳動自動控制原理與設(shè)計[M].北京:北京工業(yè)大學(xué)出版社,1997暢
[3] 莫林斯(MOLINS)公司.MK95 卷煙機(jī)電氣控制系統(tǒng)使用說明書[Z].英國:莫林斯公司出版,1986暢
[4] 孟慶華.煙支重量控制的數(shù)理分析[J].煙草科技,2001,(6):22-24暢
[5] 孟慶華,王坦坤.重量控制器的調(diào)試與維修[J].煙草科技,1997,(2):30-31暢