
使用高效率電源調(diào)節(jié)可以減少整體系統(tǒng)成本,旨在從PV模塊提取最大限度的能量(使用最大功率點追蹤技術--MPPT)。現(xiàn)有的面板系統(tǒng)也存在缺點,一整天只能導向一個方向,不能總是直接面對太陽光。
在這篇文章中,我們將討論的技術是,如何在系統(tǒng)級提高太陽能面板效率,包括太陽能電池板最大受光定位,最大限度地從太陽能板提取現(xiàn)有電力,以及智能電池壽命管理。
框圖

圖1.框圖
我們從框圖中可以看到,該系統(tǒng)的主要部件是一個MCU或一個片上系統(tǒng)(SoC)。系統(tǒng)的全部智能都來源于這顆芯片,它是可重構(gòu)和可升級的。在太陽能面板中,兩個光電二極體保持與面板平面垂直,其輸出反饋到MCU(MCU)。這些二極管和直流電機確定面板方位。根據(jù)二極管輸入,MCU控制直流馬達使太陽能電池板定位到可以收到最大光的方向。這兩個用于陽光跟蹤的光電二極體是反向偏壓的,這意味著通過這些二極管的反向電流隨入射光而變化。在白天,反向電流在10uA和 75uA之間變化。逆向暗電流(當沒有光線入射光電二極體)只有幾nA。
跨阻放大器(TIA)用于將反向電流轉(zhuǎn)換成等效電壓。放大器的增益使用反饋電阻設置。光電二極體經(jīng)常有大量輸出電容。這需要在TIA并聯(lián)反饋電容,從而保證穩(wěn)定性并提供帶寬限制減少寬帶噪聲。TIA的輸出電壓Vout,由下列公式?jīng)Q定:
Vout = Vref - Iin * Rfb
這里Rfb是電阻反饋,Iin是二極管電流,Vref是連接到運算放大器正極的參考電壓。
輸出電壓是使用一個片上模數(shù)轉(zhuǎn)換器數(shù)字化的。由于反向電流很小(數(shù)十uA),ADC必須能夠分辨較小的電壓,所以需要精確的參考電壓。每一個傳感器的輸出要經(jīng)過固件IIR濾波器濾波,清除任何光強度的突然變化。系統(tǒng)中使用一個ADC可測量到多個電壓。兩個二極管對應的數(shù)字化值不斷地比較。如果兩個值之間的差異在一個預定的門限內(nèi),面板位置保持不動。如果差超過門限,面板朝強度高的方向傾斜,直到差進入門限范圍內(nèi)。這樣我們就可以定位面板朝最大光強度的方向。
直流電機使用MCU產(chǎn)生的PWM信號來驅(qū)動。PWM占空比決定電機旋轉(zhuǎn)速度。保持占空比較低,這是為了有緩慢而精確的運動。隨著面板定位好自身方向接受最強光,PWM占空比逐漸降低。一個可行的案例是一個65535 step的16位PWM。采用這樣小的step,就可以從黎明到黃昏都能準確地追蹤陽光。
電機運動時電流是幾十mA。MCU的GPIO不能提供足夠的源電流來驅(qū)動電機。要有一個電機驅(qū)動芯片來增大。驅(qū)動有H橋結(jié)構(gòu),其允許電機電流方向的數(shù)字控制,因此電機方向也可控制。驅(qū)動可以提供1A的電流。還要注意,跟蹤機制是這樣的,電機是定期的(每隔幾分鐘)間歇脈沖。因此,驅(qū)動電機的平均電流相當小。
有兩個開關連接到MCU。這些開關當面板旋轉(zhuǎn)到極限位置(東和西)時觸發(fā),他們決定面板的最大旋轉(zhuǎn)限度。在MCU上有一個輔助實時時鐘,其保持時間跟蹤,所以一旦太陽下山,光強明顯變?nèi)醯臅r候,面板重新回到初始位置,面向東方。第二天,面板接著追蹤太陽并處理。
最大功率點跟蹤
圖2顯示了光電模塊的等效電路。太陽能電池可以看作電流源,其和一個二極管并聯(lián)。在沒有光時,沒有電流產(chǎn)生,它表現(xiàn)為一個二極管。當有光線入射到太陽能電池時,電流產(chǎn)生。
正常操作下,太陽能電池的效率會由于其內(nèi)阻損失功耗而降低。寄生電阻由并聯(lián)分流電阻 (Rsh)和串聯(lián)電阻(Rs)構(gòu)成。理想情況下,Rsh應該是無窮大,因此不會有路徑讓電流分流,Rs應該零,這樣不會在到達負載之前有電壓降。
研究發(fā)現(xiàn),串聯(lián)電阻Rs的值隨溫度升高而增大。為了使用效果比較好,就需要有一個較低的串聯(lián)電阻Rs。因此,在較高的環(huán)境溫度下,面板效率會降低,如沙漠。而在寒冷的國家,串聯(lián)電阻的值比較小,效率會更高。
在該系統(tǒng)中,用于充電的電池是負載RL。它可能使太陽能面板誤認為電池有匹配的阻抗,從而給電池轉(zhuǎn)移最多電荷。這也可以能通過改變太陽能面板的運行點實現(xiàn),解釋見下文。
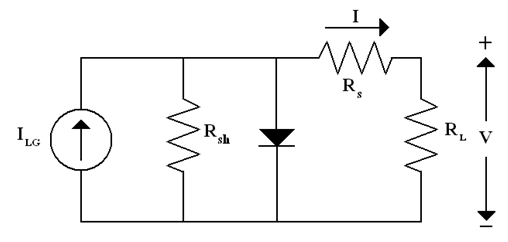
圖2 PV模塊等效電路
PV模塊的典型V-I輸出特性見圖3。研究表明,溫度變化是影響PV輸出電壓變化的主要因素,而輻射主要影響PV輸出電流。隨著照明增加,電流增大,此特征更明顯。負載線和PV模塊V-I曲線(指定溫度和輻照下)的交匯點決定運行點。產(chǎn)生的最大功率基于不同大氣條件下負載線的調(diào)整。
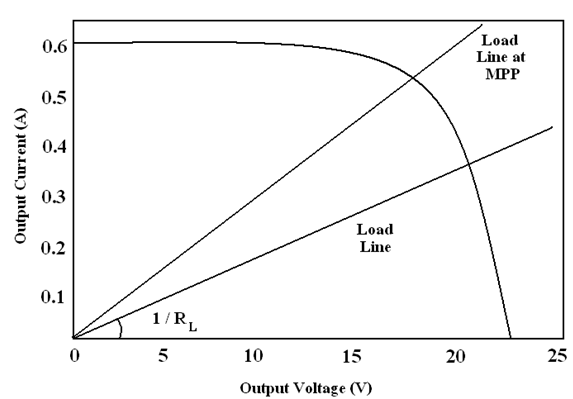
圖3.太陽能電池的V-I特點
圖4說明了太陽能電池功率和電壓的對比圖。可以看出,對于短路電流(Isc,功率圖最左面點),和開路電壓(Voc,功率圖最右面點),面板輸出功率都為零。在某一個點,稱為最大功率點,輸送到面板的功率是最大的。MPPT算法的目標是使太陽能面板工作在這一點上,輸出最大功率。
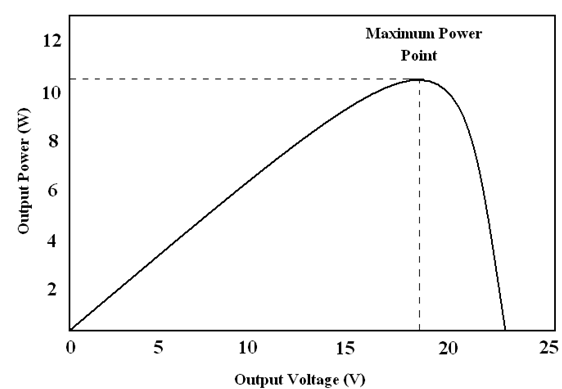
圖4 功率與電壓對比圖
面板輸出連接到DC-DC轉(zhuǎn)換器單元,其將面板電壓轉(zhuǎn)換成一個適合電池充電的可用電壓。DC-DC單元包括由MOSFET、電感、濾波器。操作DC-DC轉(zhuǎn)換器必要的開關脈沖(PWM)由MCU產(chǎn)生。緊接著DC-DC單元的是一個MOSFET開關,用于通過面板改變負載。正如之前的解釋,對于給定的溫度和日照,面板輸出功率隨連接的負載變化而變化,對于某個特定負載,功率傳輸最大。可變負載也可稱為可變操作點。我們的目標是跟蹤這個變化的最大功率點。
用于來跟蹤最大功率點機制的流程圖如圖5所示:
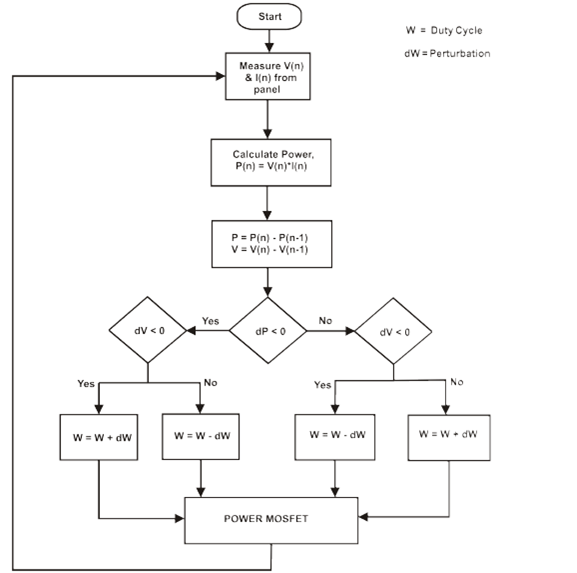
圖5 MPPT算法的流程圖
這個MPPT設計方法是基于PV陣列輸出電壓或電流規(guī)則的,或者基于相應的參考電壓或電流信號,要么是常數(shù)或來自PV光伏陣列輸出特性(例如,功率和功率變化)。該方法的一個變化是直接使用dc/dc轉(zhuǎn)換器占空比作為控制參數(shù),強制導數(shù)dP/dD為零,這里P是PV陣列輸出功率,D是占空比。因此只需要一個控制環(huán)路。
最常用的擾動觀察法是最MPPT算法。在該方法中,連接MOSFET(隔開面板和電池)的PWM的占空比變化量很少,只有幾dW。如果這少量變化增加了。面板電壓和電流會測量到,相應的功率變化dP也會觀察到。如果變化是正的,那么擾動是正確的方向,我們繼續(xù)在相同的方向擾動(例如,增加占空比)。如果功率改變是負的,那么就要翻轉(zhuǎn)顛倒擾亂方向(例如,減少占空比責任周期)然后繼續(xù)工作。這種算法的主要目的是總是提升功率曲線,以達到從太陽能電池輸出最大功率。通過這種方式,我們可以使太陽能電池板總是工作在提供最大功率的點上。
如果還沒有實現(xiàn)MPPT系統(tǒng),連接到面板的負載總是一成不變的,它不可能工作在最大功率點。因此,它將不再從面板捕獲最大功率。
電池健康管理:
因為太陽能板暴露在太陽下的時間大約為半天,這個期間它可以用來給電池充電。對于大多數(shù)市面上能買得到的鉛酸電池,充電需要10-12小時,這和有陽光的時間大約是相同的。然而,為了提高電池的使用壽命,可以采用下面的方法。通常,電池充電要經(jīng)歷三個階段,如圖7所示:
•恒流充電或大量充電階段
•頂部充電階段
•浮充電階段
讓我們以一個12V鉛酸電池充電為例。電池電平通過MCU內(nèi)置的ADC模塊連續(xù)監(jiān)測。如果電池電壓小于標稱值,那么稱為“接受電壓Accept Voltage”的適當充電電壓應用于電池,隨溫度而變化。應用于電池的接受電壓電壓使用PWM驅(qū)動的大功率晶體管切換,從DC-DC電源轉(zhuǎn)換器輸出。在這期間,充電電流不變。在鉛酸電池情況下,我們可以稱之為大量充電階段。一旦電池電壓達到標稱值,電池就已經(jīng)充了70%。現(xiàn)在還要繼續(xù)充電,直到電流降到大約電池額定電流的3%。這可通過前面介紹的持續(xù)PWM充電方式實現(xiàn)。這個充電階段稱為頂部充電階段。當充電電流降到額定電流的3%,電池完全充滿。頂部充電階段用來保持電池健康。如果沒有頂部充電階段,電池會逐漸失去完全充電的能力。
充電完成后,為了維持充電電平,電池采用PWM波形形式的合適電壓(稱為浮充電壓)。浮充電壓通常用于自放電補償(通過鉛和其他寄生效應)。電池的浮充電壓和接受電壓隨溫度變化而變化。MCU連續(xù)讀取溫度傳感器的輸出,然后確定接受電壓和浮充電壓。他們的值由MCU產(chǎn)生的PWM波形控制。
還要確保電池不要長時間進行頂部充電。電池必須要有相反地浮充電,因為電池可能無法容忍過渡充電。在片內(nèi)RTC的幫助下,這很容易實施。脈沖充電電池充電的優(yōu)勢是,我們避免了很多化學效應,例如硫酸鹽化作用,有毒氣體等等。還要以避免電池在50攝氏度以上充電。溫度傳感器就是用于此用途。
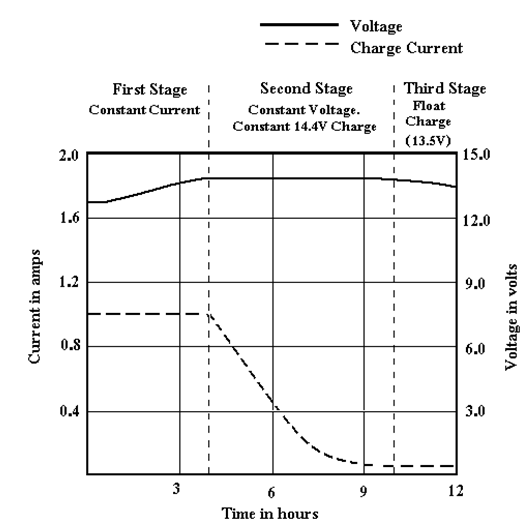
圖6電池充電
可以使用一顆片上系統(tǒng)(SoC)實現(xiàn)我們談到的整個系統(tǒng),比如賽普拉斯的混合信號芯片PSoC,其具備可編程模擬和可編程數(shù)字邏輯。所需的外部組件僅僅是一個二極管和DC-DC轉(zhuǎn)換器的電感,以及用來平衡電池和PV模塊電壓的電阻。
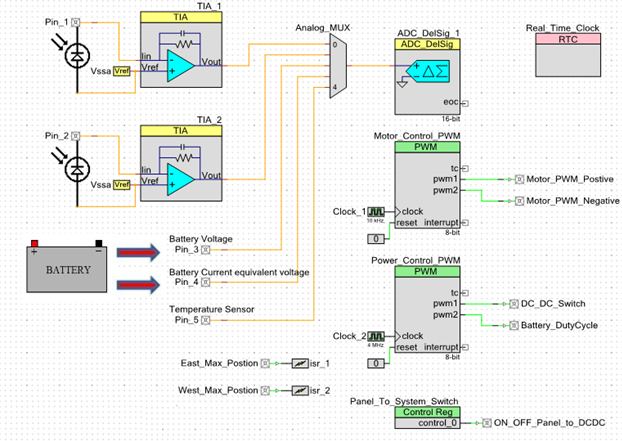
圖7:PSoC實現(xiàn)示意圖
PSoC包含的跨阻放大器(TIA)組件可以提供基于放大器的和對數(shù)電流-電壓轉(zhuǎn)換增益,并具有阻抗增益,用戶可以選擇帶寬。放大器的增益可以使用反饋電阻器設置,可以通過固件選擇20ΩK、30ΩK、40ΩK、80ΩK、150ΩK、250ΩK、500ΩK和1MΩ。光電二極體通常輸出體現(xiàn)為電容,并聯(lián)一個反饋電容可以保證其穩(wěn)定性。TIA有滿足這個要求的可編程反饋電容。二極管的特性可能會隨環(huán)境條件而變化。可以通過PSoC編程來適應這些變化的條件。
輸出電壓是使用20-bit Delta Sigma ADC數(shù)字化的。通過為ADC選擇合適的片上參考,就有可能測量到2uV的電壓。ADC參考采用是精度很高的源,只有不到1%的錯誤。在這個系統(tǒng)中,可以使用一個ADC測量多個電壓。這些電壓可以通過PSoC內(nèi)部的模擬多路復用器來順序采樣和數(shù)字化。多路復用器可以通過固件在輸入通道之間切換。PWM模塊是驅(qū)動直流電機和MOSFET(其為電池充電)脈沖必需的。還可以使用PWM硬件通過一點編程產(chǎn)生這些PWM波形。內(nèi)部實時時鐘(RTC)跟蹤時間,因此一旦太陽下山,光強度顯著下降時,面板會回到初始位置面向?qū)|方。第二天面板繼續(xù)追蹤太陽。RTC還用來防止過充電。
通過本文提到的實施三個子系統(tǒng)可以提高光電系統(tǒng)效率。過高的安裝費用和PV模塊的低轉(zhuǎn)換效率是阻止人們采用太陽能發(fā)電的原因。使用智能方法,就可以提高效率,就有可能鼓勵人們使用PV模塊。任何現(xiàn)有的太陽能板只需要做很少的努力就都可以升級到有這三個實現(xiàn)。升級的成本相比PV模塊本身來說很少。讓我們開始利用太陽能,減少環(huán)境污染,建立綠色星球。