
一、引言
目前國內外智能交通行業(yè)車輛檢測裝置采用的技術除了最早研發(fā)的地感線圈技術以外,還包括光電技術、超聲波技術、微波技術、視頻技術等,然而后面幾種技術容易受到日照、風雨、電磁場等外界干擾,應用范圍受到很大的限制,因此地感線圈仍為主要的檢測手段。地感線圈作為車輛檢測器,是在道路表層下埋置環(huán)形感應線圈,以測定電感變化檢測車輛是否存在。地感線圈雖然是相對成熟的車輛檢測技術,但仍有許多缺點。利用AMR (Anisotropic Magneto Resistant)各向異性磁傳感器進行的地磁車輛檢測,通過檢測汽車對地磁信號的擾動,判斷車輛的到位及通過,從而實現車輛信息的分析、控制及管理,具有安裝簡便、抗干擾能力強、集成化程度高等更多優(yōu)點。
二、AMR各向異性磁阻傳感器的工作原理
物質在磁場中電阻發(fā)生變化的現象稱為磁電阻效應。磁電阻效應有基于霍爾效應的普通磁電阻效應和各向異性磁電阻效應之分。對于強磁性金屬(鐵、鈷、鎳及其合金),當外加磁場平行于磁體內部磁化方向時, 電阻幾乎不隨外加磁場而變; 當外加磁場偏離金屬的內磁化方向時,金屬的電阻減小,這就是各向異性磁電阻效應。
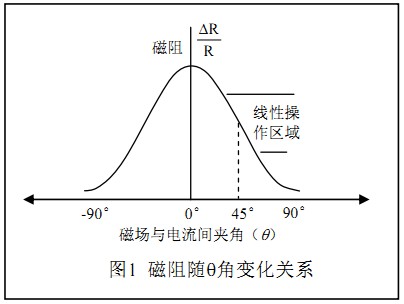
AMR各向異性傳感器的基本單元是用一種長而薄的坡莫(Ni-Fe)合金用半導體工藝沉積在以硅襯底上制成的,沉積的時候薄膜以條帶的形式排布,形成一個平面的線陣以增加磁阻的感知磁場的面積。外加磁場使得磁阻內部的磁疇指向發(fā)生變化,進而與電流的夾角發(fā)生變化,就表現為磁阻電阻各向異性的變化。從圖1可以清楚地看到,坡莫合金薄膜的電阻依賴于磁化強度M 和電流I 方向的夾角θ ,即
![]()
式中,R// —電流方向與磁化方向平行時的電阻;R⊥—電流方向與磁化方向垂直時的電阻。
當電流方向與磁化方向平行時,傳感器最敏感。而一般磁阻都工作于圖中45°線性區(qū)附近,這樣可以實現輸出的線性特性。
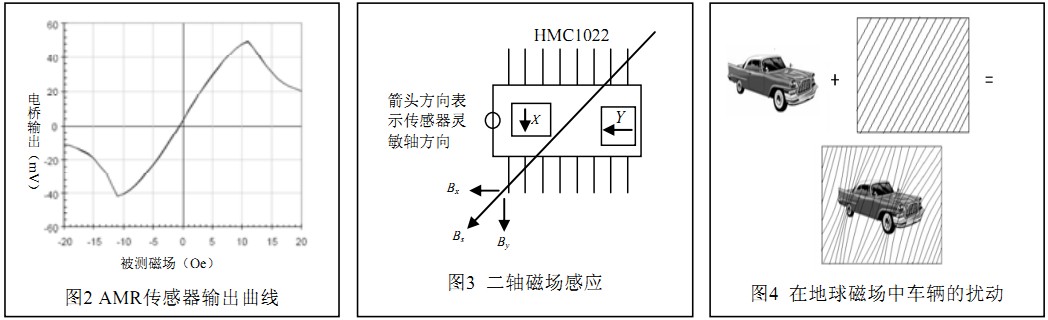
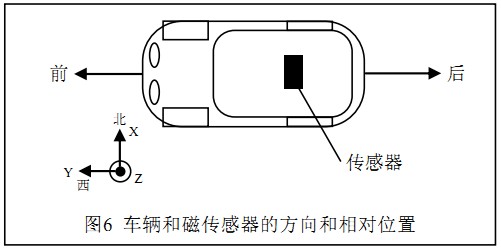
美國霍尼韋爾公司磁阻傳感器HMC102是一款性能優(yōu)秀的磁阻傳感器,其核心部分是由4個帶狀坡莫合金薄膜構成的惠斯通電橋。當其暴露在變化磁場中時,其電阻有所改變(ΔR),引起相應輸出電壓的變化,圖2所示是HMC1021的輸出曲線,在磁場±6Gauss內有一個靈敏度為1mV/Gauss的線性區(qū)域,可精確提供磁場強度和方向變化的信息。通過將兩個各向異性的磁阻傳感器接在一起,該部件成為兩軸傳感器,將其水平安裝后,能夠將任何水平磁場分為X軸和Y軸向量分量。圖3表示HMC1022傳感器中該傳感器的組合。當磁場方向為BS方向的地球磁場時,傳感器將磁場分成Bx、By向量分量。這樣,Bx、By就既能代表分方向,也能代表BS的幅值。當有鐵磁性物質靠近傳感器時,BS的方向和幅值就會發(fā)生變化。要注意的是,該器件在曝露于強磁場范圍內使用時必須進行合適的置位/復位操作。霍尼韋爾磁傳感器提供了在當地磁場范圍內非常靈敏的磁阻傳感器。可測量幾十微高斯的磁場,這是霍爾元件所不能做到的。由于它的體積小、全固態(tài)、在某些場合下可以取代磁通門傳感器。
三、AMR傳感器在車輛檢測中的應用
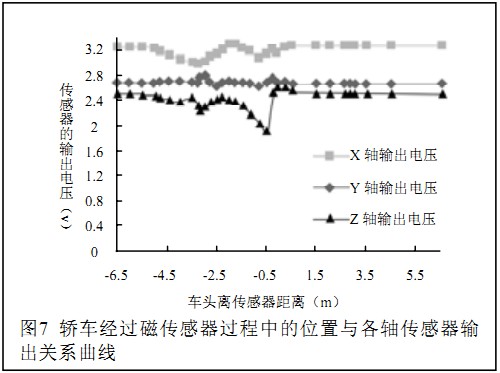
由于幾乎所有的道路車輛的底盤都含有一定數量的黑色金屬(鐵、鋼、鎳、鈷等),所以磁傳感器很適合用于檢測車輛。但并不是所有的車輛都發(fā)出在檢測中磁傳感器可以使用的磁場,所以就不能用諸如霍爾傳感器“強磁場”的大多數傳感裝置,“弱磁場”傳感器被用來收集該磁場以及附近車輛產生的干擾,圖4說明了一個鐵磁性物體,如汽車,是如何干擾地球磁場的。大的鐵磁物體的磁擾動,如汽車,可看作多個雙極性磁鐵組成的模型。這些雙極性磁鐵具有北-南的極化方向,引起地球磁場的擾動。這些擾動在汽車發(fā)動機和車輪處尤為明顯,但也取決于在車輛內部、車頂或后備箱中有沒有其它鐵磁物質。總之,其綜合影響是對地球磁場磁力線的扭曲和畸變。

對于檢測停車位上車輛的存在,可用一個HMC1021(單軸)和一個HMC1222(雙軸)組成一個三軸傳感器,將傳感器放置在停車位中間,當磁場方向為BS方向的地球磁場時,傳感器將磁場分成Bx、By、Bz向量分量。這樣,Bx、By、Bz就既能代表分方向,也能代表BS的幅值。當車輛接近傳感器時,BS的方向和幅值就會發(fā)生變化。一個各向異性的磁傳感器能夠檢測到一個軸的變化,有三軸的傳感器能夠在檢測范圍邊緣上更加可靠的檢測車輛,為檢測提供更可靠的保障。通過對AMR傳感器簡單的設置,可以有效而可靠地檢測車輛的存在。圖5是簡單的車輛檢測電路,HMC1021電橋上采用5V供電,增益為200,10kΩ的電位器用于電橋補償和修整地球磁場偏置,當傳感器電橋的外加磁場為地球磁場時(地一般在0.5Gauss左右),通過10 kΩ電位器將放大器輸出設置為2.5V。正確選擇R7、R8、R9、R10的值,可以調整傳感器輸出范圍。HMC1021也可用其它HMC10xx系列傳感器代替,只是靈敏度不同,HMC1021規(guī)定的靈敏度為1mV/V/Gauss。對于實際使用中,若HMC1021磁阻傳感器測量的磁場范圍超出±6Gauss,傳感器就不能很好的保持線性輸出,它的靈敏度也會隨之降低,此時就不能用它來檢測極弱的磁場,一旦出現這種情況,可用脈沖電路施加到SET/RESET電流帶來恢復其原來的靈敏度。
實驗利用微控制器D0口每隔10s送出一個1ms低電平,通過IRF7509(一個N溝道和一個P溝道集成的MOS管芯片)和外接電容產生設置/重置脈沖,對傳感器進行設置/重置。圖5中只給出單軸電路,對于需要精確測量車子存在和方向的可按照上圖鋪設出完全一樣的電路來檢測。對于車輛方向和存在進行測定的實驗設置,三軸磁傳感器安放在地面,東-西方向放置,X、Y、Z軸方向定義如圖6所示。
在這個實驗中,一輛轎車從磁傳感器上方正中央沿東-西方向開過。原點代表轎車車頭剛好到達傳感器位置。X、Y、Z 三軸輸出曲線分別如圖7所示。
從實驗數據可以看出,當車頭離傳感器有一定距離時,傳感器的各輸出軸幾乎不會發(fā)生變化,車輛漸漸靠近傳感器時,車輛的附近的地磁場朝車子方向發(fā)生了偏移,此時,X軸為傳感器靈敏軸,X軸的輸出有了較明顯變化變化,當車輛的前輪軸通過傳感器上方時,車輛的車輪(含有鐵鎳合金)對地磁場有較大的影響,此時,Y軸為靈敏軸,Y軸的輸出變化最大。車輛繼續(xù)前行,當傳感器的位置位于車輛的發(fā)動機下方時,由于發(fā)動機對附近磁場有較大影響,此時,X軸、Z軸為傳感器靈敏軸,X、Z軸輸出變化最大。當車輛的后輪到達傳感器位置時,Y軸輸出又有了較大變化。當車子快離開傳感器時,X軸、Z軸輸出有了較大變化,這是因為車輛的后備箱里面有裝備用胎,對X、Z方向的磁場造成一定的干擾。當車輛遠離開傳感器上方時,各軸輸出回復到原來的狀態(tài)。
四、結論
從實驗數據中可以看出,汽車位置變化可以引起地磁場的變化,當傳感器上方有車子時,傳感器周圍穩(wěn)定的地磁場分布收到了擾動,這個擾動可以被傳感器確定的撲捉到,傳感器輸出變化明顯,可以此檢測出特定車位上車輛的到位其情況。是一種實用的車輛檢測傳感器。它具有不容易受溫度變化及風雪天氣干擾等的優(yōu)點。在智能化交通系統(tǒng)和相關應用中,地磁車輛檢測必將以器性能可靠,安裝方便,價格經濟等優(yōu)勢取代目前普遍使用的車輛檢測產品。