
摘要: 首先介紹了nesC語(yǔ)言及專門(mén)面向傳感器網(wǎng)絡(luò)的TinyOS操作系統(tǒng)軟件平臺(tái),,然后闡述了網(wǎng)絡(luò)節(jié)點(diǎn)的硬件模塊功能特點(diǎn)及其接口電路,最后根據(jù)硬件抽象體系結(jié)構(gòu)的原則,在TinyOS操作系統(tǒng)平臺(tái)下,,對(duì)CC2420無(wú)線收發(fā)模塊驅(qū)動(dòng)組件設(shè)計(jì)作了深入的研究,,以組件的形式將其硬件功能封裝成接口供上層軟件調(diào)用,實(shí)現(xiàn)了對(duì)上層軟件的硬件特征屏蔽,,從而實(shí)現(xiàn)該模塊功能的軟件語(yǔ)言表達(dá)和兼容性較強(qiáng)的跨平臺(tái)抽象體系結(jié)構(gòu),。
引言
網(wǎng)絡(luò)節(jié)點(diǎn)是構(gòu)成無(wú)線傳感器網(wǎng)絡(luò)的基本單位,無(wú)線傳感器網(wǎng)絡(luò)節(jié)點(diǎn)有兩種常用體系結(jié)構(gòu):Atmel AVR處理器+TinyOS[1]和MSP430+TinyOS[2].本文采用 ATmega128L+TinyOS的體系結(jié)構(gòu),。因此,,CC2420驅(qū)動(dòng)組件設(shè)計(jì)應(yīng)符合TinyOS的硬件抽象體系結(jié)構(gòu)(Hardware AbSTractiON Architecture,HAA)[3].TinyOS中將硬件抽象體系結(jié)構(gòu)分為3層:硬件表示層(Hardware Presentation Layer,HPL)、硬件適配層(Hardware Adapation Layer,HAL)和硬件接口層(Hardware Interface Layer,HIL),。各層功能作用及具體設(shè)計(jì)原理在本文中作了細(xì)致的研究,。CC2420是一款基于IEEE 802.15.4協(xié)議的低功耗無(wú)線收發(fā)模塊。本文根據(jù)硬件抽象體系結(jié)構(gòu)的原則,,對(duì)CC2420無(wú)線收發(fā)模塊在TinyOS平臺(tái)下的驅(qū)動(dòng)組件設(shè)計(jì)作了深入的研究,,這使得基于CC2420硬件的無(wú)線傳感器網(wǎng)絡(luò)(Wireless Sensor Network,WSN)應(yīng)用程序的開(kāi)發(fā),可以與TinyOS操作系統(tǒng)的組件模型,、主動(dòng)消息,、基于事件驅(qū)動(dòng)等機(jī)制有效地結(jié)合起來(lái),使應(yīng)用程序具有代碼量小,、能耗少,、并發(fā)性高等特點(diǎn)。
1 nesC語(yǔ)言及TinyOS操作系統(tǒng)
早期的面向傳感器網(wǎng)絡(luò)的操作系統(tǒng)TinyOS是用匯編和C語(yǔ)言開(kāi)發(fā)的,。但經(jīng)研究發(fā)現(xiàn),,C語(yǔ)言并不能高效地完成傳感器網(wǎng)絡(luò)的應(yīng)用開(kāi)發(fā)。所以研究人員對(duì)C語(yǔ)言進(jìn)行了一定的擴(kuò)展,,提出了一種新型的編程語(yǔ)言--支持組件化編程的nesC(C language for network embedded Systems)語(yǔ)言[4].用nesC語(yǔ)言編寫(xiě)的TinyOS[56],將輕量級(jí)線程,、主動(dòng)消息通信模型、事件驅(qū)動(dòng)機(jī)制和組件化編程等技術(shù)相結(jié)合,,是一種專門(mén)為無(wú)線傳感器網(wǎng)絡(luò)開(kāi)發(fā)的微型操作系統(tǒng),,使面向傳感器網(wǎng)絡(luò)的操作系統(tǒng)及應(yīng)用程序開(kāi)發(fā)的復(fù)雜度大大降低,使程序的整體性能得到優(yōu)化,,提高了程序的健壯性和安全性,。

圖1 TinyOS組件模型體系結(jié)構(gòu)
TinyOS采用組件模型,這種模塊化的思想使得應(yīng)用程序的編寫(xiě)更加方便,、高效,。程序開(kāi)發(fā)人員可以方便快捷地將獨(dú)立的組件組合到各種配件文件中,并在應(yīng)用程序的頂層(toplevel)配件文件中完成程序的整體裝配,。TinyOS的組件模型體系結(jié)構(gòu)如圖1所示,。
上層組件對(duì)下層組件發(fā)命令,下層組件向上層組件發(fā)信號(hào)通知事件,最底層的組件直接和硬件打交道,。TinyOS中有3種類(lèi)型的組件:硬件抽象組件,、合成組件、高層軟件組件,。硬件抽象組件將物理硬件映射到TinyOS組件模型,;合成組件模擬高級(jí)硬件行為;高層軟件組件負(fù)責(zé)數(shù)據(jù)傳輸,、控制,、路由等。本文針對(duì)的是實(shí)際硬件上的抽象層,。
2 節(jié)點(diǎn)硬件模塊
節(jié)點(diǎn)采用ATmega128L微處理器和CC2420無(wú)線收發(fā)模塊,,硬件連接如圖2所示。
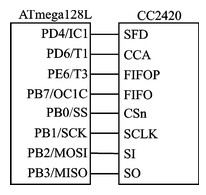
圖2 ATmega128L與CC2420的硬件連接
CC2420[7]無(wú)線收發(fā)芯片符合IEEE 802.15.4標(biāo)準(zhǔn),,工作在ISM 2.4 GHz頻段,。其內(nèi)部集成了壓控振蕩器、天線,、16 MHz晶振等外圍電路,。CC2420通過(guò)SPI接口與ATmega128L完成設(shè)置和收發(fā)數(shù)據(jù)兩方面的任務(wù)。如圖2所示,,SPI接口由CSn,、SI、SO和SCLK四個(gè)引腳構(gòu)成,。ATmega128L為接口主設(shè)備,,訪問(wèn)CC2420內(nèi)部寄存器和存儲(chǔ)區(qū);CC2420為SPI接口從設(shè)備,,接收時(shí)鐘信號(hào)和片選信號(hào),,并在處理器的控制下執(zhí)行輸入/輸出操作。
CC2420通過(guò)SFD,、FIFO,、FIFOP和CCA四個(gè)引腳與ATmega128L表示收發(fā)數(shù)據(jù)狀態(tài)。CC2420收到物理幀的SFD字段后,,會(huì)在SFD引腳輸出高電平,,直到接收完該幀,。如果啟用了地址識(shí)別,,在地址識(shí)別后,SFD引腳立即轉(zhuǎn)為輸出低電平,。FIFO和FIFOP引腳標(biāo)識(shí)FIFO緩存區(qū)的狀態(tài),。如果接收FIFO緩存區(qū)有數(shù)據(jù),F(xiàn)IFO引腳輸出高電平;如果接收FIFO緩沖區(qū)為空,,F(xiàn)IFO引腳輸出低電平,。FIFOP引腳在接收FIFO緩存區(qū)的數(shù)據(jù)超過(guò)某個(gè)臨界值時(shí)或者在CC2420接收到一個(gè)完整的幀以后輸出高電平,觸發(fā)ATmega128L的中斷,。CCA引腳有效表示信道空閑評(píng)估有效,,通常為CSMACA算法的實(shí)現(xiàn)提供依據(jù)。
3 CC2420驅(qū)動(dòng)組件
TinyOS中的硬件抽象體系結(jié)構(gòu)分為3層:硬件表示層,、硬件適配層和硬件接口層,。本設(shè)計(jì)根據(jù)實(shí)際需求,完成了其中兩層結(jié)構(gòu)的實(shí)現(xiàn),。
3.1 HPL組件
如前面所述,,ATmega128L通過(guò)SPI接口訪問(wèn)CC2420內(nèi)部寄存器和存儲(chǔ)區(qū),CC2420使用SFD,、FIFO,、FIFOP和CCA四個(gè)引腳表示收發(fā)數(shù)據(jù)狀態(tài)。硬件表示層的作用就是根據(jù)這種硬件連接將CC2420所提供的硬件基本功能以接口函數(shù)的形式封裝起來(lái),,供上層HAL組件調(diào)用,,實(shí)現(xiàn)對(duì)底層硬件的隔離。
HPL體系結(jié)構(gòu)如圖3所示,。HPL組件包括3個(gè)模塊文件HPLCC2420FIFOM,、HPLCC2420M、HPLCC2420Interrupt,分別實(shí)現(xiàn)CC2420的不同功能接口,,最后由HPLCC2420C以組件的形式將所有的接口函數(shù)封裝起來(lái),,提供給HAL組件調(diào)用。

圖3 HPL體系結(jié)構(gòu)
HPLCC2420FIFOM模塊文件實(shí)現(xiàn)了HPLCC2420FIFO接口,,完成了對(duì)發(fā)送,、接收數(shù)據(jù)緩存區(qū)的讀寫(xiě)控制工作,主要接口函數(shù)如下:
//將一串?dāng)?shù)據(jù)寫(xiě)入發(fā)送緩存區(qū)TXFIFO, 完成后告知TXFIFODone()函數(shù)
async command result_t HPLCC2420FIFO.writeTXFIFO(uint8_t len,uint8_t *msg),;
//讀取接收緩存區(qū)RXFIFO中的數(shù)據(jù),,完成后告知RXFIFODone()函數(shù)
async command result_t HPLCC2420FIFO.readRXFIFO(uint8_t len,uint8_t *msg);
HPLCC2420M模塊文件實(shí)現(xiàn)了3個(gè)接口:
1,、 StdControl接口,,完成ATmega128L中與CC2420相連的硬件引腳端口電平設(shè)置及硬件SPI接口相關(guān)寄存器的初始化工作。
2,、 HPLCC2420接口,,實(shí)現(xiàn)CC2420內(nèi)部寄存器的讀寫(xiě)功能。CC2420有33個(gè)控制/狀態(tài)寄存器,、15個(gè)命令選通寄存器和2個(gè)訪問(wèn)FIFO緩存區(qū)的寄存器,。
3,、 HPLCC2420RAM接口,實(shí)現(xiàn)對(duì)CC2420內(nèi)部RAM的讀寫(xiě)功能,。CC2420的內(nèi)部RAM分為3塊--128字節(jié)的發(fā)送FIFO緩存區(qū),、128字節(jié)的接收FIFO緩存區(qū)以及112字節(jié)的用于保存設(shè)備地址、密鑰等信息的存儲(chǔ)區(qū),。
主要接口函數(shù)如下:
//寫(xiě)CC2420的命令選通寄存器
async command uint8_t HPLCC2420.cmd(uint8_t addr)
//寫(xiě)寄存器
async command result_t HPLCC2420.write(uint8_t addr, uint16_t data)
//CC2420內(nèi)部RAM讀寫(xiě)接口函數(shù)
async command result_t HPLCC2420RAM.write(uint16_t addr, uint8_t length, uint8_t* buffer),;
async command result_t HPLCC2420RAM.read(uint16_t addr, uint8_t length, uint8_t* buffer);
//讀寫(xiě)完成向上調(diào)用的事件通知
async event result_t writeDone(uint16_t addr, uint8_t length, uint8_t* buffer),;
async event result_t readDone(uint16_t addr, uint8_t length, uint8_t* buffer),;
HPLCC2420InterruptM模塊文件實(shí)現(xiàn)了HPLCC2420Interrupt、HPLCC2420Capture接口,,主要完成中斷捕捉功能,。CC2420使用SFD、FIFO,、FIFOP和CCA四個(gè)引腳表示收發(fā)數(shù)據(jù)狀態(tài),,當(dāng)引腳電平變化時(shí),觸發(fā)ATmega128L硬件中斷,。TinyOS平臺(tái)下,,根據(jù)事件驅(qū)動(dòng)機(jī)制,向上調(diào)用HPLCC2420Interrupt(類(lèi)似HPLCC24240Capture)接口中的事件通告函數(shù) result_t fired (void)進(jìn)行上層處理,。HPLCC2420Interrupt接口中使用result_t startWait(bool low_to high)函數(shù)設(shè)置觸發(fā)方式(上升沿還是下降沿),,使用result_t disable(void)函數(shù)禁止中斷使能。HPLCC2420InterruptM模塊文件還調(diào)用了HPLTimer1M.nc和TimerC.nc文件中的Timer接口函數(shù),,完成相關(guān)的底層中斷處理,。
3.2 HAL組件
HAL組件使用HPL組件HPLCC2420C提供的源接口,在CC2420所提供的基本功能的基礎(chǔ)上進(jìn)一步抽象,,形成CC2420初始化,、設(shè)備地址設(shè)置、收發(fā)模式設(shè)置,、發(fā)送接收消息等復(fù)雜功能,,同時(shí)以組件接口的形式進(jìn)行封裝供上層HIL組件調(diào)用。HAL體系結(jié)構(gòu)如圖4所示,。HAL組件包括兩個(gè)模塊文件CC2420RadioM.nc和CC2420Control.nc,最后由配置文件CC2420RadioC.nc裝配起來(lái),。
CC2420ControlM模塊文件使用SplitControl接口完成CC2420的寄存器初始化、啟動(dòng)等工作,,主要函數(shù)如下:
command result_t SplitControl.init(),;//CC2420寄存器初始化
command result_t SplitControl.start();//開(kāi)啟1.8 V穩(wěn)壓源供電,,將復(fù)位RSTN引腳置為高電平,,啟動(dòng)CC2420晶振
CC2420ControlM模塊文件還實(shí)現(xiàn)了CC2420Control接口,實(shí)現(xiàn)對(duì)CC2420的一些控制功能:
command result_t CC2420Control.TunePreset(uint8_t chnl),;//通信頻道設(shè)置
async command result_t CC2420Control.TxMode(),;//設(shè)為發(fā)送模式
async command result_t CC2420Control.RxMode();//設(shè)為接收模式
async command result_t CC2420Control.OscillatorOn(),;//開(kāi)啟晶振
async command result_t CC2420Control.enableAutoAck(),;//自動(dòng)應(yīng)答幀功能使能
async command result_t CC2420Control.enableAddrDecode();//地址識(shí)別功能使能
command result_t CC2420Control.setShortAddress(uint16_t addr),;//設(shè)置設(shè)備地址
CC2420RadioM使用BareSendMsg接口發(fā)送消息,,使用ReceiveMsg接口接收消息:
command result_t BareSendMsg.Send(TOS_MsgPtr msg);//發(fā)送消息
event result_t BareSendMsg.sendDone(TOS_MsgPtr msg,result_t success),;//發(fā)送完成
event TOS_MsgPtr ReceiveMsg.receive(TOS_MsgPtr m),;//接收消息事件通告

圖4 HAL體系結(jié)構(gòu)
結(jié)語(yǔ)
首先以TinyOS操作系統(tǒng)為軟件平臺(tái),根據(jù)網(wǎng)絡(luò)節(jié)點(diǎn)的硬件模塊功能及其接口電路的特點(diǎn),,在硬件抽象體系結(jié)構(gòu)的原則下,,對(duì)CC2420無(wú)線收發(fā)模塊在TinyOS 平臺(tái)下的驅(qū)動(dòng)組件設(shè)計(jì)作了深入的研究。實(shí)驗(yàn)表明,,節(jié)點(diǎn)在滿足指標(biāo)要求的同時(shí)運(yùn)行穩(wěn)定可靠,。