
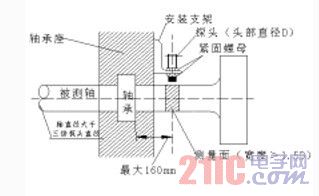
圖1 傳感器探頭安裝示意圖
當(dāng)每個(gè)測點(diǎn)需要同時(shí)安裝兩個(gè)傳感器探頭,,兩個(gè)探頭應(yīng)分別安裝在軸承兩邊的同一平面上相隔90°±5°。由于軸承蓋一般是水平分割的,,因此通常將兩個(gè)探頭分別安裝在垂直中心線每一側(cè)45°,,從原動機(jī)端看,分別定義為X探頭(水平方向)和Y探頭(垂直方向),,X方向在垂直中心線的右側(cè),,Y方向在垂直中心線的左側(cè)。如圖2所示,。
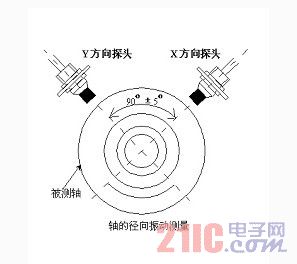
圖2 同時(shí)安裝兩個(gè)傳感器探頭
2 延伸電纜的安裝
延伸電纜作為連接探頭和前置器的中間部分,,是渦流傳感器的一個(gè)重要組成部分,所以延伸電纜的安裝應(yīng)保證在使用過程中不易受損壞,,應(yīng)避免延伸電纜的高溫環(huán)境,。探頭與延伸電纜的連接處應(yīng)鎖緊,接頭用熱縮管包裹好,,這樣可以避免接地并防止接頭松動,。在盤放延伸電纜時(shí)應(yīng)避免盤放半徑過小而折壞電纜線,。一般要求延伸電纜盤放直徑不得小于55mm.
3 前置器的安裝
前置器應(yīng)置于鑄鋁的盒子內(nèi),以免機(jī)械損壞及污染,。不允許盒子上附有多余的電纜,,在不改變探頭到前置器電纜長度的前提下,允許在同一個(gè)盒內(nèi)裝有多個(gè)前置器,,以降低安裝成本,,簡化從前置器到監(jiān)視器的電纜布線。采用適當(dāng)?shù)母綦x和屏蔽接地,,將信號所受的干擾降至最低限度,。前置器是整個(gè)傳感器系統(tǒng)的信號處理部分,要求將其安裝在遠(yuǎn)離高溫環(huán)境的地方,,其周圍環(huán)境應(yīng)無明顯的蒸汽和水珠,、無腐蝕性的汽體、干燥,、振動小,、前置器周圍的環(huán)境溫度與室溫相差不大的地方。安裝時(shí)前置器殼體金屬部分不要同機(jī)殼或大地接觸,。安裝時(shí)必須避免有其他干擾信號影響測量電路,。
4軸振動傳感器安裝間隙的鎖定
將探頭、延伸電纜,、前置器連接起來,,并給傳感器系統(tǒng)接上電源,用精度較高的萬用表監(jiān)測前置器的輸出電壓,,同時(shí)調(diào)整探頭與被測面的間隙,,當(dāng)前置器的輸出電壓大約在10-11vDC之間時(shí),擰緊探頭的兩個(gè)緊固螺母固定探頭即可,。
5 注意事項(xiàng)
①不規(guī)則的被測體表面,,會給實(shí)際測量帶來附加誤差,因此被測體表面應(yīng)該平整光滑,,不應(yīng)存在凸起、洞眼,、刻痕,、凹槽等缺陷。
②當(dāng)被測體為圓軸且探頭中心線與軸心線正交時(shí),,一般要求被測軸直徑為探頭頭部直徑的3倍以上,。
③被測體表面不應(yīng)有傷痕、小孔和縫隙,,不允許表面電鍍,。被測體材料應(yīng)與探頭,、前置器標(biāo)定的材料一致。
④探頭通過支架固定在軸承座上,,支架應(yīng)有足夠的剛度以提高其自振頻率,,避免或減小被測體振動時(shí)支架的受激自振。
⑤對初始間隙的要求
電渦流傳感器應(yīng)在一定的間隙電壓(傳感器頂部與被測物體之間間隙,,在儀表上指示一般是電壓)值下,,其讀數(shù)才有較好的線性度,所以在安裝傳感器時(shí)必須調(diào)整好合適的初始間隙,。
轉(zhuǎn)子旋轉(zhuǎn)和機(jī)組帶負(fù)荷后,,轉(zhuǎn)子相對于傳感器將發(fā)生位移。如果把傳感器裝在軸承頂部,,其間隙將減少,;如裝在軸承水平方向,其間隙取決于轉(zhuǎn)子旋轉(zhuǎn)方向,;當(dāng)轉(zhuǎn)向一定時(shí),,其間隙取決于安裝在右側(cè)還是左側(cè)。為了獲得合適的工作間隙值,,在安裝時(shí)應(yīng)估算轉(zhuǎn)子從靜態(tài)到轉(zhuǎn)動狀態(tài)機(jī)組帶負(fù)荷后軸頸位移值和位移方向,,以便在調(diào)整初始間隙時(shí)給予考慮。根據(jù)現(xiàn)場經(jīng)驗(yàn),,轉(zhuǎn)子從靜態(tài)到工作轉(zhuǎn)速,,軸頸抬高大約為軸瓦間隙的1/2;水平方向位移與軸瓦形式,、軸瓦兩側(cè)間隙和機(jī)組滑銷系統(tǒng)工作狀態(tài)有關(guān),,一般位移值為0.05-0.20mm。
在調(diào)整傳感器初始間隙時(shí),,除了要考慮上述這些因素外,,還要考慮最大振動值和轉(zhuǎn)子原始晃擺值。傳感器初始間隙應(yīng)大于轉(zhuǎn)軸可能發(fā)生的最大振幅和轉(zhuǎn)軸原始晃擺值的1/2,。