
摘要:溫度是科學(xué)技術(shù)中最基本的物理量之一,雀工業(yè)生產(chǎn)和生活中,常常是表征對象和過程狀態(tài)的重要參數(shù),,其控制具有非線性、時滯性和不確定性,,用傳統(tǒng)的控制達不到好的控制效果,。設(shè)計一種以單片機MSP430F149為系統(tǒng)的核心部件,并將模糊控制算法應(yīng)用到其中的溫控儀上,,溫度控制范圍為常溫0~100℃,,設(shè)定溫度值與測量溫度值實時顯示,控制精度可達±0.5℃,。該系統(tǒng)采用恒瀧供電,,電路較簡單,成本低,,溫度控制精度高,,可以廣泛應(yīng)用于需要進行恒溫控制的生產(chǎn)和生活中。
關(guān)鍵詞:MSP430F149,;溫度值實時顯示,;模糊控制;溫控儀
0 引言
溫度控制對于工業(yè)和日常生活等領(lǐng)域都具有廣闊的應(yīng)用前景,,很多應(yīng)用領(lǐng)域,,需要精度較高的恒溫控制,由于其控制具有非線性,、時滯性和不確定性,,用傳統(tǒng)的控制達不到好的控制效果,。模糊控制是一種基于規(guī)則的控制,它直接采用語言型控制規(guī)則,,出發(fā)點是現(xiàn)場操作人員的控制經(jīng)驗或相關(guān)專家的知識,,其魯棒性強,干擾和參數(shù)變化對控制效果的影響被大大減弱,,所以特別適合于0~100℃溫度的精確控制,。
MSP430系列單片機是一個16位的、具有精簡指令集的,、超低功耗的混合型單片機,。MSP430F149單片機采用了精簡指令(RISC),具有豐富的尋址方式(7種源操作數(shù)尋址,、4種目的操作數(shù)尋址),、簡潔的27條內(nèi)核指令以及大量的模擬指令,大量的寄存器以及片內(nèi)數(shù)據(jù)存儲器都可參加多種運算,,還有高效的查表處理指令,;有較高的處理速度,在8MHz晶體驅(qū)動下指令周期為125 ns,。這些特點保證了可編制出高效率的源程序,。MSP430F149單片機具有10位/12位ADC、16位Sigma-Delta A/D,、直接尋址模塊(DMA),、端口1~6、基本定時器(Basic Timer)等的一些外圍模塊的不同組合,。其中,,看門狗可以使程序失控時迅速復(fù)位;模擬比較器進行模擬電壓的比較,,配合定時器,,可設(shè)計出A/D轉(zhuǎn)換器,。該系統(tǒng)采用MSP430F149單片機,,可以省去A/D等硬件電路,使其成本降低,,可靠性大大增強,。
1 系統(tǒng)設(shè)計
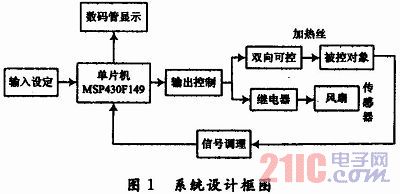
系統(tǒng)以MSP430F149單片機為控制核心,溫度測量由鉑電阻恒流調(diào)理電路完成,,調(diào)理電路的輸出電壓送入單片機,,在單片機內(nèi)部實現(xiàn)A/D轉(zhuǎn)換,并對采樣數(shù)據(jù)進行濾波及標度變換處理,,溫度值由3位數(shù)碼管顯示,。輸入的溫度設(shè)定值由4位獨立式鍵盤電路進行,設(shè)定值送入單片機后,由另一個3位數(shù)碼管顯示,。系統(tǒng)設(shè)計框圖如圖1所示,。
2 主要硬件電路設(shè)計
2.1 鉑電阻測溫調(diào)理電路
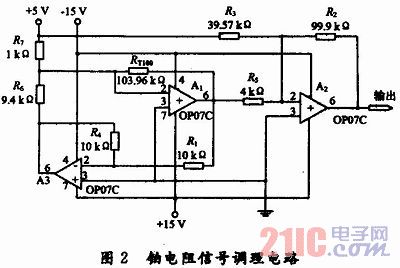
在本系統(tǒng)中,實際溫度值由鉑電阻恒流工作調(diào)理電路進行測量,。為了克服鉑電阻的非線性特點,,在信號調(diào)理電路中加入負反饋非線性矯正網(wǎng)絡(luò)。如圖2所示,,鉑電阻選用標稱值為100Ω的RT100作為溫度傳感器,。A1,A2和A3采用低溫漂運放OP07,,由于有電流流經(jīng)鉑電阻傳感器,,所以當(dāng)溫度為0℃時,在鉑電阻傳感器上有壓降,,這個電壓為鉑電阻傳感器的偏置電壓,,是運放A1輸出電壓的一部分,使恒流工作調(diào)理電路的輸出實際不為0,,所以需要對這個偏置電壓調(diào)零,,圖中R3為調(diào)零電阻。圖中運放A3及電阻R1,,R4和R6構(gòu)成負反饋非線性校正網(wǎng)絡(luò),。R5用于調(diào)整運放A2的增益。
2.2 溫度控制電路
系統(tǒng)加熱絲與風(fēng)扇均采用圖3所示電路形式,。電路采用了晶體管驅(qū)動的直流電磁繼電器,。當(dāng)單片機的P5.4為低電平時,繼電器RL1吸合,,當(dāng)P5.4為高電平時,,繼電器RL1釋放。采用這種控制邏輯可以使繼電器在上電復(fù)位或單片機受控復(fù)位時不吸合,。繼電器由晶體管2N222A驅(qū)動,,可以提供所需的驅(qū)動電流。

3 模糊控制規(guī)則表及軟件流程圖
3.1 建立模糊控制規(guī)則表
采用溫度誤差E和溫度誤差變化率Ec作為模糊控制器的輸入變量,,溫度控制量U作為模糊控制器的輸出變量,。系統(tǒng)中溫度誤差E、溫度誤差變化率Ec和溫度控制量U(單位:℃)的基本域分別為[-5,,+5],,[-2,+2]和[0,,1],。輸入語言變量的語言值取7個,,輸出控制量用于控制繼電器驅(qū)動電路。將占空比模糊控制量設(shè)定為0,,1/4,,1/2,3/4,,1五個單點模糊量和1個控制風(fēng)扇吹風(fēng)的單點模糊量,。輸出語言變量的語言值取6個。當(dāng)U=0時,,單片機P3.5口置低電平,,使風(fēng)扇控制電路工作;當(dāng)U=1時,,加熱絲控制電路工作,,且繼電器在1個周期內(nèi)全關(guān)斷;當(dāng)U=2時,,加熱絲控制電路工作,,且繼電器在1/4個周期內(nèi)接通,在3/4個周期內(nèi)關(guān)斷,;當(dāng)U=5時,,加熱絲控制電路工作,且繼電器在1個周期內(nèi)全接通,。本控制系統(tǒng)選用三角函數(shù),、升半梯形函數(shù)與降半梯形函數(shù)作為輸入量語言值的隸屬函數(shù),用脈沖函數(shù)作為輸出量語言值的隸屬函數(shù),。模糊控制規(guī)則如表1所示,。
由模糊規(guī)則進行推理可以得出模糊控制器語言規(guī)則的輸入輸出關(guān)系,其關(guān)系是一個非線性的關(guān)系曲面,。當(dāng)偏差較大時,,控制量的變化應(yīng)盡力使偏差迅速減小,;當(dāng)偏差較小時,,除了要消除偏差外,還要考慮系統(tǒng)的穩(wěn)定性,,防止系統(tǒng)出現(xiàn)過沖,,甚至引起系統(tǒng)振蕩。
3.2 軟件流程圖
主程序軟件流程如圖4所示,。

溫度采集和顯示、鍵盤處理等在編程時作為相對獨立的功能模塊來實現(xiàn),,并自主程序運行中按照設(shè)定的流程來調(diào)用,,完成相應(yīng)的任務(wù)后再返回主程序即可,。
4 仿真分析
在Proteus仿真軟件中加入編譯后的HEX文件,使用分析圖表分析系統(tǒng)分析加熱器控制信號與風(fēng)扇控制信號輸出端口的占空比,。當(dāng)輸入電壓為2.7 V時,,系統(tǒng)的輸出顯示實際溫度為54℃,系統(tǒng)的設(shè)定溫度為55℃,,此時P5.4輸出占空比為2:1的加熱器控制信號,;而當(dāng)系統(tǒng)的實際溫度大于設(shè)定溫度時,系統(tǒng)輸出適當(dāng)?shù)娘L(fēng)扇控制信號以恒定的功率散熱,,說明滿足設(shè)計要求,。
5 結(jié)語
本系統(tǒng)采用低功耗MSP430系列單片機作為控制核心,整個控制電路較簡單,,用模糊控制算法設(shè)計程序,,設(shè)定溫度值與測量溫度值實時顯示,控制精度可達±0.5℃,,在實際生產(chǎn)和生活中具有廣泛的實用性,。