
1.引言
隨著MEMS技術(shù)的快速發(fā)展,,內(nèi)窺鏡技術(shù)已取得了重大的研究成果,,特別是人體胃腸道無線膠囊內(nèi)窺鏡是醫(yī)用電子內(nèi)窺鏡系統(tǒng)的一個重大突破[1-4]。圍繞著膠囊式內(nèi)窺鏡,,越來越多的研究正在展開,。但是無線內(nèi)窺鏡膠囊也存在不少問題,2004年的歐洲技術(shù)報告中指出,,運動與姿態(tài)控制功能的實現(xiàn)是需要首先解決的問題,,包括運動控制和定位問題 [5],而為了保證在診斷治療過程中運動和定位問題的有效性,,對這些微型醫(yī)療膠囊在體內(nèi)的空間位置進行實時的定位位置檢測就顯得極其重要了,。在體內(nèi)微型診療裝置的定位技術(shù)方面,傳統(tǒng)的方法一般都采用超聲成像,、核醫(yī)學(xué)影像及熒光造型定位等技術(shù)[6],,但是這些定位方法卻存在著成本高、操作復(fù)雜,,對人體容易造成輻射和無法滿足長時間動態(tài)定位的缺點,。許多學(xué)者對裝置定位系統(tǒng)進行了的研究,提出了磁定位的簡化模型及相應(yīng)的動態(tài)跟蹤技術(shù)[7-9],。
為了更好地滿足永磁體用于體內(nèi)微型膠囊準確定位測量的要求,,在本文中作者設(shè)計了一種基于HMC1022和HMC1021三軸磁阻傳感器模塊,經(jīng)兩級放大電路放大后,,由數(shù)據(jù)采集裝置對膠囊空間磁場強度進行多點采集的定位系統(tǒng),。該系統(tǒng)采用了較以往更高靈敏度的磁阻傳感器模塊,合理的布置傳感器模塊組,,具有更高檢測靈敏度高和測量范圍大的優(yōu)點,。
2.膠囊定位檢測原理
磁感應(yīng)定位是利用磁阻傳感器的霍爾效應(yīng),即根據(jù)永磁體隨著其磁矩方向和距離的變化在空間磁場形成特定規(guī)律的磁場分布,。相應(yīng)地,,通過檢測特定磁場參數(shù)的變化,我們就能夠測量永磁體在空間位置的變化,,并確定其在空間的具體位置[9],。
在人體內(nèi),膠囊可看作剛體,。同時,,為了磁阻傳感器模塊定位的需要,,在膠囊內(nèi)部放置圓柱永磁體。如圖1所示,,膠囊在空間的位姿可以由其內(nèi)部任意點的位置以及膠囊內(nèi)永磁體的磁矩方向與柱面坐標系所形成的兩角表示,,其中為膠囊中心點的坐標,為膠囊磁矩方向與柱坐標的夾角,,空間原點坐標系,。

當膠囊中圓柱永磁體的尺寸遠小于其到磁傳感器距離r時,永磁體可簡化成一個磁偶極子,,可以直接寫出膠囊在磁阻傳感器模塊的磁感應(yīng)強度[10]:
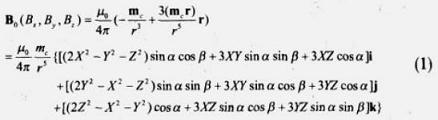
式中,mc為膠囊的磁矩矢量,,rm(xm,ym,zm)為膠囊空間位置向量及坐標,,rs(xs,ys,zs)為磁阻傳感器模塊位置向量及坐標,r=rs- rm=(X,Y,Z)=(xs-xm,ys-ym,zs-zm)為磁阻傳感器模塊相對于膠囊的位置向量,。mc為膠囊磁矩的大小,,其中(xs,ys,zs) 是布置在空間的三軸磁阻傳感器模塊的坐標,其坐標軸與全局坐標系重合,。從式(1)可知坐標(xs,ys,zs)為已知量,,再通過實驗測量出各磁場分量 Bx,By,Bz,α,β此時如果要求解出五個未知量xm,ym,zm,,則至少兩個三軸磁阻傳感器模塊才可以,。
3.系統(tǒng)硬件設(shè)計
本系統(tǒng)硬件由4組三軸磁阻傳感器模塊(內(nèi)置置位/復(fù)位電路),、放大電路和數(shù)據(jù)采集卡三部分組成。
3.1磁阻傳感器模塊
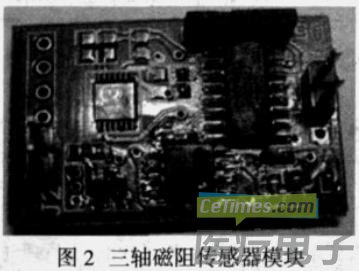
圖 2所示為設(shè)計制作的由HMC1022和HMC1021互相垂直安裝而構(gòu)成的三軸磁阻傳感器模塊,,內(nèi)置置位/復(fù)位電路,,用來測量膠囊內(nèi)部條形磁鐵在空間產(chǎn)生的磁感應(yīng)強度,其中,,HMC1022測量兩個方向(x,y軸方向)(即公式(3)中的Bx,By),,而HMC1021測量一個方向(z軸方向)的磁感應(yīng)強度(即公式(3)中的Bz)。HMC1022和HMC1021分別為雙軸和單軸磁阻傳感器,,它們除了測量磁感應(yīng)強度的軸數(shù)不同外,,具有相同的技術(shù)參數(shù)。 HMC1022和HMC1021內(nèi)集成置位/復(fù)位帶,,可降低溫度飄移效應(yīng),、非線性誤差和由于有高磁場的存在導(dǎo)致輸出信號丟失的影響[11]。

3.2放大電路
隨著距離的增加,,永磁體磁場強度的分布衰減很快,。鑒于上述永磁體磁場強度隨距離的變化規(guī)律,在實驗中,,采用AD620這種典型的放大器件,,在滿足數(shù)據(jù)采集卡的分辨率精度大于磁阻傳感器的輸出分辨率精度的要求條件下,,通過計算實驗中選擇了1000倍放大倍數(shù)。
3.3數(shù)據(jù)采集
采用PCI-1716數(shù)據(jù)采集卡將放大電路輸出信號采集進入計算機處理分析,。利用LABVIEW虛擬儀器圖形化軟件編程,,實現(xiàn)采集模擬信號、A/D轉(zhuǎn)換的功能,。
4.實驗步驟
如圖4所示為實驗步驟流程框圖,。
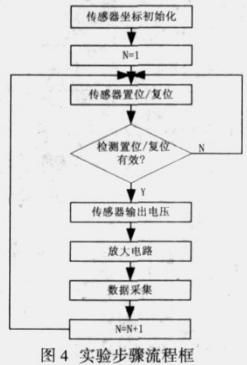
實驗采用如下程序進行:
(1)傳感器坐標初始化實驗時將4組三軸磁阻傳感器模塊的空間坐標固定,并記錄下來(即公式(1)中的xs,ys,zs),,以待采集完成后帶入公式(1)處理求解計算用,。
(2)在每次膠囊移動相應(yīng)位置且固定后,記錄下膠囊與各組磁阻傳感器模塊的位置距離,,并通過磁阻傳感器模塊中集成的置位/復(fù)位電路來提高傳感器的靈敏度,。
(3)置位/復(fù)位后磁阻傳感器模塊輸出有效的磁場強度電壓,隨后經(jīng)過電壓放大和采集,,送入計算機進行分析處理,,根據(jù)前述公式(1)計算出(xm,ym,zm,α,β),并與步驟(1)中實際記錄距離進行對比分析,。
5.實驗及結(jié)果分析
在實驗中,,將4個磁阻傳感器模塊放置于正方體實驗架(0.3mx0.3mx0.2m)的四個頂角,如圖3所示,,其初始坐標依次固定為:A(0,0,0),,B(0.3,0,0),C(0.3,0.3,0),,D(0,0.3,0),。在采集過程中,把膠囊磁矩方向調(diào)整和軸正向一致,,在磁阻傳感器模塊布置平面內(nèi)把膠囊從點(0.1,0.03,0)沿直線每隔3cm定位一次且逐步移動到點(0.1,0.27,0),,4個磁阻傳感器模塊在每次定位后依次采集數(shù)據(jù)。如圖5所示,,磁阻傳感器模塊A測得的磁場強度不斷下降,,磁阻傳感器模塊B、C磁場強度變化趨勢逐漸接近,,磁阻傳感器模塊D測得的磁場強度緩慢上升,。將實驗數(shù)據(jù)和計算數(shù)據(jù)對照,發(fā)現(xiàn)兩者誤差在±10%范圍內(nèi),。說明本文設(shè)計的磁阻傳感器模塊組能夠較準確地測出膠囊在運動過程中的磁感應(yīng)強度,。

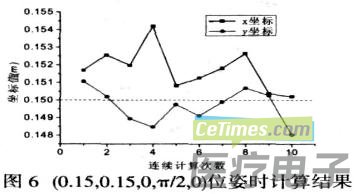
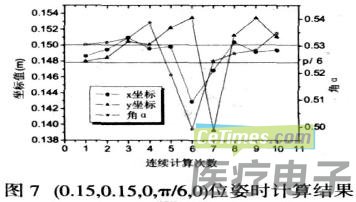
同時對于膠囊三個給定位姿狀態(tài),進行連續(xù)10次計算的結(jié)果,。選擇的位姿點為(0.15,0.15,0,π/2,0)和(0.15,0.15,0,π /6,0),。圖6為位姿點(0.15,0.15,0,π/2,0)計算的結(jié)果,,由圖中可見,計算的坐標值x,y都在0.15上下波動,,誤差在±3%,,而軸坐標值和兩個角度值的計算結(jié)果都非常理想,沒有標出,。圖7為位姿點(0.15,0.15,0,π/6,0)計算的結(jié)果,,此時膠囊磁矩方向與軸角度為30。從圖中坐標值波動情況來看,,其誤差擴大到了7%,,而與軸夾角坐標誤差為5%,另外兩個參數(shù)的計算結(jié)果很理想,。
上面的測量實驗和計算結(jié)果表明,,設(shè)計的定位檢測系統(tǒng)能夠較準確地測出膠囊在運動過程中的磁感應(yīng)強度,從而準確的定位出膠囊的空間位置和方向,。同時應(yīng)當注意的是當膠囊在4組磁阻傳感器模塊測量區(qū)域中部時,其計算結(jié)果精度較高,。
6.結(jié)論
在本文中,,作者提出了一種研究該定位技術(shù)的新型實驗系統(tǒng),利用高靈敏度的磁阻傳感器模塊對微膠囊空間磁場強度進行感應(yīng)采集,。原理和實驗都證明了可以通過檢測永磁體空間磁場分布來實現(xiàn)對微型內(nèi)窺鏡膠囊的定位,。通過對實驗結(jié)果的分析證明,該定位系統(tǒng)對于膠囊在運動過程中的空間位置和方向的定位具有較高的準確率,,可以有效應(yīng)用于微型內(nèi)窺鏡膠囊在體內(nèi)的定位,,顯著提高了臨床疾病診斷的準確率。
本文作者創(chuàng)新點:采用了高靈敏度的三軸垂直磁阻傳感器模塊,,并結(jié)合放大和采集電路對膠囊空間磁場強度進行檢測,,實現(xiàn)準確定位。此系統(tǒng)比以往有更大的準確檢測范圍,,可達到20-30cm,。
參考文獻
[1]IddanG,MeronG,GlukhovskyA,etal.WirelessCapsuleEndoscopy.Nature.2000,405(6785):417
[2]http://www.microsystem.re.kr/
[3]http://www.cqjs.net/.
[4]http://www.rfnorika.com/
[5]DARIO.P,DILLMAN.R.EURON-TechologyRoadmaps.E.R.Rnetwork,Editor.April23,2004,pages:6-22.
[6]Golden,etal.Apparatusandmethodforlocatingamedicaltubeinthebodyofapatient.USpatent5622169.
[7]侯文生,鄭小林,,彭承琳,,彭小燕,吳旭東.體內(nèi)微型診療裝置磁定位簡化模型的實驗研究.儀器儀表學(xué)報.2005,26(9):895-897.
[8]侯文生,,鄭小林,,彭承琳,彭小燕,,吳旭東.基于磁定位的消化道微型藥物釋放裝置動態(tài)跟蹤技術(shù)研究.北京生物醫(yī)學(xué)工程.2005,,24(1),;36-38.
[9]徐凱.永磁同步電動機矢量控制中磁場定位的DSP實現(xiàn).微計算機信息.2006,5(2):171-172.
[10]Fogel,L.,Owens,A.,Walsh,M.Artificialintelligencethroughsimulatedevolution.NewYork:Wiley,1966
[11]http://www.hollywell.com.