1 前言
蓄電池剩余容量的準(zhǔn)確測量在電動汽車的發(fā)展中一直是一個非常關(guān)鍵的問題。有效的電池管理系統(tǒng)有利于電池的壽命提高。所以對蓄電池SOC的準(zhǔn)確估計成為電動車電池能量管理系統(tǒng)的中心問題。如果能夠正確估計蓄電池的SOC,就能合理利用蓄電池提供的電能,延長電池組的使用壽命。
方案采用總線式方式組網(wǎng),應(yīng)用現(xiàn)場總線完成各個節(jié)點之間的數(shù)據(jù)交換。在分布式方案中,多能源控制器為主控ECU,它通過現(xiàn)場總線和多個下位ECU通信。工作過程中,每個控制器的通信子模塊以定時器或者中斷的方式在后臺運行,完成數(shù)據(jù)的收發(fā)工作,節(jié)省主流程資源開支。如圖1所示。

電池的SOC值是電池控制器通過CAN總線發(fā)送給多能源控制器,而整車的工作模式則是多能源控制器通過采集各個ECU的信息通過一定的邏輯算法來確定的。一旦確定了這些參數(shù),那么我們就可以決定是啟動發(fā)動機還是關(guān)閉發(fā)動機,也可以決定電機應(yīng)該工作在哪個狀態(tài)。例如,當(dāng)電池的SOC值在50%與70%之間,這個時候多能源控制器算得整車工作模式是在起步模式,那么就表示當(dāng)前系統(tǒng)的電能源充足,不需要開啟發(fā)動機,而且,電機可以以驅(qū)動方式來工作。
2系統(tǒng)硬件組成
如圖2所示,電池控制器可以與外部汽車中其他控制系統(tǒng)通過CAN總線網(wǎng)絡(luò)進行通信。一個電池管理ECU(電子控制單元)和4個電池組信息檢測ECU;我們所使用的單體電池被組合成24個電池組。我們對每6個電池組配置一個測量單元,即共有電池組ECU1~ECU4。4個電池組ECU與電池包ECU組成一個 CAN總線網(wǎng)絡(luò),一個CAN控制器與電池組ECU組成電池管理系統(tǒng)內(nèi)部的CAN網(wǎng)絡(luò),另一個CAN控制器與汽車中其他控制系統(tǒng)組成整車光纖CAN總線網(wǎng)絡(luò)。

圖2 電池管理ECU的結(jié)構(gòu)框圖
如圖3所示,電池組ECU所采用的嵌入式微控制器為P87C591單片機,它內(nèi)部硬件集成了CAN控制器和A/D模數(shù)轉(zhuǎn)換模塊。每個電池組ECU管理6個電池組,完成的功能為測量6個電池組的電壓和溫度信息,將收集的信息通過CAN總線發(fā)送給電池管理ECU。6路電池組的電壓分別經(jīng)過電壓調(diào)理電路后接至 P87C591的6路A/D輸入口。6路溫度傳感器的信號線接至P87C591的同一路IO口。
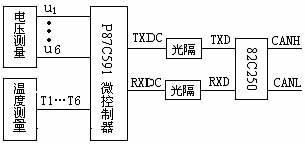
圖3電池組ECU的電路結(jié)構(gòu)圖
3 CAN接口的電路設(shè)計
在本設(shè)計中采用P87C591作為微控制器。其中,P87C591與CAN驅(qū)動芯片的接口電路設(shè)計如圖4所示。主要由P87C591,光電隔離電路,CAN驅(qū)動等三部分組成。
光電隔離電路:為了進一步抑制干擾,CAN總線接口中往往采用光電隔離電路,光電隔離器一般位于CAN控制器與收發(fā)器之間。
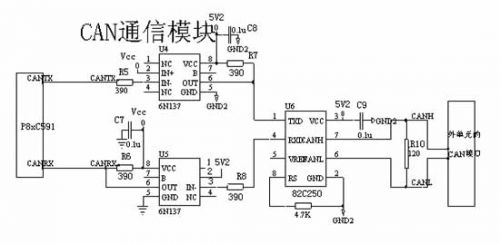
圖4 CAN通信模塊硬件設(shè)計電路圖
系統(tǒng)總程序包括初始化程序和主循環(huán)程序,其流程圖如圖5所示:
系統(tǒng)首先上電,接著對CAN和定時器進行初始化,系統(tǒng)等待中斷,如果有中斷,判斷中斷類型,如果是SJA1000控制器的中斷,就讀取SJA1000控制器的數(shù)據(jù),并且釋放緩沖區(qū),操作完中斷返回,如果是定時器50ms周期中斷,對電壓,電流數(shù)據(jù)進行AD轉(zhuǎn)換,計算SOC值,并由CAN發(fā)送相關(guān)數(shù)據(jù),操作完中斷返回
主函數(shù) main()

圖 5 主程序圖
4結(jié)束語
基于CAN總線的數(shù)據(jù)通信技術(shù)具有較高的可靠性、實時性和靈活性。CAN總線在混合動力電動汽車鎳氫電池管理系統(tǒng)的應(yīng)用中具有廣闊的應(yīng)用前景和發(fā)展空間。
