
主節(jié)點(diǎn)采用ARM7內(nèi)核的LPC2294微控制器,使用RTL8019AS作為以太網(wǎng)控制器,軟件上采用具有網(wǎng)絡(luò)功能強(qiáng)、性能穩(wěn)定、移植性好的μCLi nux作為操作系統(tǒng)。基于CAN總線的運(yùn)動(dòng)控制系統(tǒng),主要由1個(gè)主節(jié)點(diǎn)(主控制器節(jié)點(diǎn))、若干個(gè)從節(jié)點(diǎn)(電機(jī)控制節(jié)點(diǎn))以及1臺(tái)計(jì)算機(jī)構(gòu)成,主節(jié)點(diǎn)與從節(jié)點(diǎn)之間通過CAN總線進(jìn)行通信,主節(jié)點(diǎn)與計(jì)算機(jī)之間則通過以太網(wǎng)進(jìn)行通信,如圖1所示。
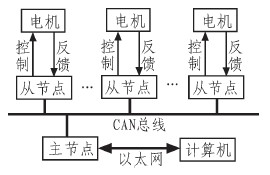
圖1 運(yùn)動(dòng)系統(tǒng)控制結(jié)構(gòu)
主節(jié)點(diǎn)主要功能包括:1)通過CAN總線發(fā)送電機(jī)控制信息給從節(jié)點(diǎn),并接收各從節(jié)點(diǎn)的反饋信息:2)通過以太網(wǎng)與計(jì)算機(jī)監(jiān)控端進(jìn)行通信,以實(shí)現(xiàn)遠(yuǎn)程監(jiān)控。
1.1 整體硬件設(shè)計(jì)
主節(jié)點(diǎn)整體硬件結(jié)構(gòu)如圖2所示。
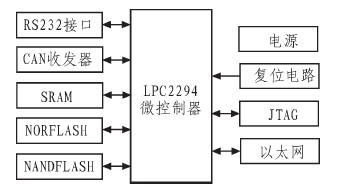
圖2 硬件結(jié)構(gòu)
主節(jié)點(diǎn)采用的LPC2294基于ARM7TDMI內(nèi)核的32位處理器,帶有256kB高速FLASH、16kB靜態(tài)RAM,內(nèi)部集成4路CAN控制器,支持SRAM、FALSH擴(kuò)展。由于LPC2294內(nèi)部集成CAN,因此外部只需CAN收發(fā)器與之連接。CAN收發(fā)器選用周立功的CTMl050T.CTM1050T是一款帶隔離的高速CAN收發(fā)器,主要功能是將CAN控制器的邏輯電平轉(zhuǎn)換為CAN總線的差分電平,并具有隔離功能(DC2500 V)、ESD保護(hù)功能及TVS管防總線過壓功能。 LPC2294具有外部存儲(chǔ)器控制器(EMC),通過該部件可以擴(kuò)展更多的FLASH和SRAM以及以太網(wǎng)、USB等外設(shè)。主節(jié)點(diǎn)采用RTL8019AS作為以太網(wǎng)控制器,分別使用MT45W4MW16、SST39VF1601、K9F2G08UOA進(jìn)行SRAM、NORFLASH、NANDFLASH的擴(kuò)展。
1.2 軟件結(jié)構(gòu)
主節(jié)點(diǎn)軟件結(jié)構(gòu)如圖3所示,U-Boot作為BootLoader(啟動(dòng)引導(dǎo)程序),負(fù)責(zé)初始化目標(biāo)板硬件與引導(dǎo)操作系統(tǒng)。這里采用μCLinux作為嵌入式操作系統(tǒng)。μCLinux(microcontrol linux)即“微控制器領(lǐng)域中的Linux系統(tǒng)”,主要是針對目標(biāo)處理器沒有存儲(chǔ)管理單元(MMU)的嵌入式系統(tǒng)而設(shè)計(jì)的。它保留了Linux的大多數(shù)優(yōu)點(diǎn):穩(wěn)定、良好的移植性、優(yōu)秀的網(wǎng)絡(luò)功能、對各種文件系統(tǒng)完備的支持和標(biāo)準(zhǔn)豐富的API.同時(shí)μCLinux包含大量的設(shè)備驅(qū)動(dòng)程序,以及提供良好的驅(qū)動(dòng)程序開發(fā)框架。驅(qū)動(dòng)程序開發(fā)或配置主要包括CAN、以太網(wǎng)以及NANDFLASH3大部分。上層應(yīng)用程序通過使用CAN接口函數(shù)、Socket接口以及庫函數(shù)進(jìn)行各種應(yīng)用開發(fā)。整個(gè)系統(tǒng)的啟動(dòng)過程是:U-Boot把μCLinux內(nèi)核從NORFLASH中加載到SRAM中,然后啟動(dòng)μCLinux,μCLinux初始化硬件及建立運(yùn)行環(huán)境后,自動(dòng)運(yùn)行預(yù)設(shè)的應(yīng)用程序。
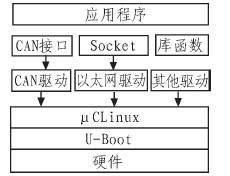
圖3 軟件結(jié)構(gòu)
2 硬件設(shè)計(jì)
2.1 LPC2294最小系統(tǒng)
LPC2294采用LQFP144封裝,最小系統(tǒng)需要模擬和數(shù)字3.3 V電源以及核心電源1.8 V.為了便于串口波特率的設(shè)置,外部接11.0 592 MHz晶振。P2.26(BOOT0)通過10 kΩ電阻上拉,P2.27(BOOT1)接一跳線座,通過跳線讓P2.27可選擇接高電平或低電平以選擇從內(nèi)部FLASH或外部NORFLASH啟動(dòng)。由CAT1025構(gòu)成手動(dòng)復(fù)位監(jiān)控電路,提高了系統(tǒng)的可靠性。當(dāng)SW按鍵按下時(shí),CAT1025的2引腳輸出持續(xù)為大于150 ms的低電平,LPC2294復(fù)位。在CAT1025的2引腳通過10 kΩ電阻上拉,防止產(chǎn)生錯(cuò)誤的引腳輸出狀態(tài),復(fù)位電路如圖4所示。
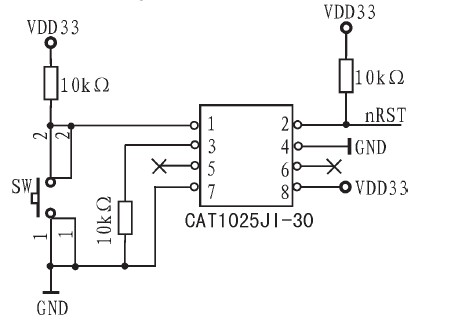
圖4 復(fù)位電路圖
2.2 SRAM和NORFLASH電路
為了運(yùn)行μCLinux操作系統(tǒng),必須擴(kuò)展系統(tǒng)RAM與FLASH.LPC2294具有外部存儲(chǔ)器控制器(EMC),該部件可同時(shí)支持多達(dá)4個(gè)單獨(dú)配置的存儲(chǔ)器組。每個(gè)存儲(chǔ)器組都支持SRAM、ROM、Flash EPROM、Burst ROM以及外部I/O設(shè)備。主節(jié)點(diǎn)外部存儲(chǔ)器地址分配情況如表1.
表1 主節(jié)點(diǎn)外部存儲(chǔ)器地址分配情況
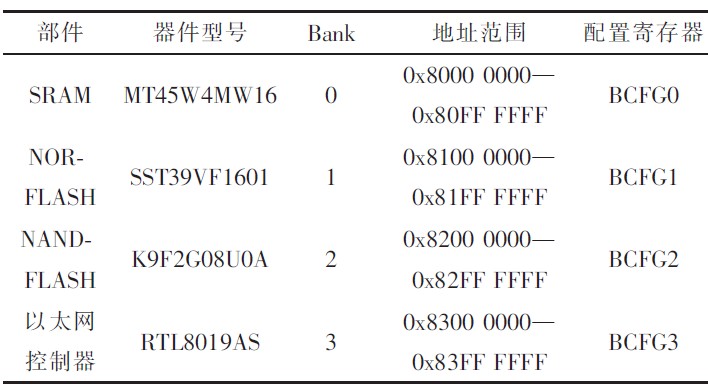
主節(jié)點(diǎn)采用的SRAM和NORFLASH分別是MT45W4MW16、SST39VF1601.MT45W4MW16是一個(gè)16位、8 MB容量的PSRAM.SST39VF1601是一個(gè)16位的CMOS多功能Flash MPF器件,儲(chǔ)存容量為2 MB.其電路連接如圖5、圖6所示。
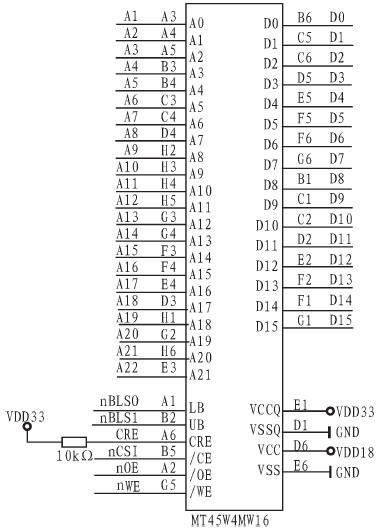
圖5 SRAM電路連接圖
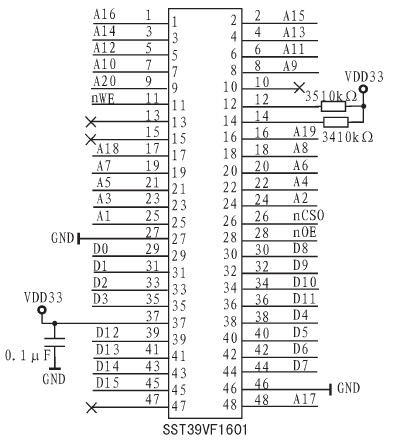
圖6 NORFLASH電路連接圖
2.3 NANDFLASH電路
NANDFLASH用作存放μCLinux的根文件系統(tǒng)和應(yīng)用程序,使用Jff2文件系統(tǒng)格式。NANDFLASH采用三星公司的K9F2G08UOA,存儲(chǔ)容量為256 M.NANDFLASH的數(shù)據(jù)接口為8位串行接口,使用nCS2作為片選線,地址區(qū)間使用0x8200 0000-0x82FF FFFF,CLE(指令使能)和ALE(地址使能)分別連接到地址總線A2和A3,因此NANDFLASH的數(shù)據(jù)寫入地址為0x82000000,命令寫入地址為0x82000004,地址寫入地址為0x82000008.R/B(準(zhǔn)備/忙等待)連接到P1.18,用于讀取當(dāng)前狀態(tài),此引腳須上拉。其電路連接如圖7所示。
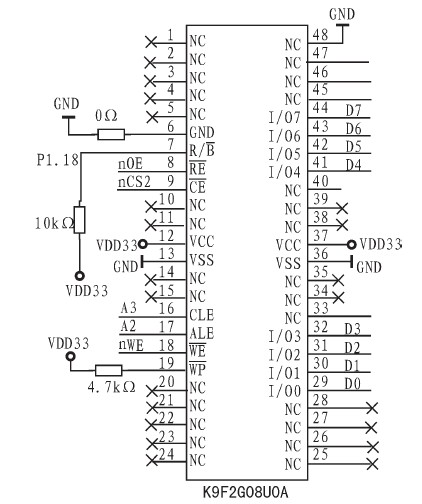
圖7 NANDFLASH電路連接圖
2.4 CAN接口電路
LPC2294內(nèi)部集成了4路CAN控制器。每個(gè)總線上的數(shù)據(jù)傳輸速率高達(dá)1 Mb/s,兼容CAN2.0B.LPC2294沒有集成CAN收發(fā)器,無法將TTL電平轉(zhuǎn)換為CAN總線的差分電平信號(hào)。因此主節(jié)點(diǎn)采用了帶有隔離功能的CTM1050T作為CAN收發(fā)器。在CAN總線兩端須連接120Ω的電阻,以匹配總線阻抗,提高數(shù)據(jù)通信的抗干擾性及可靠性。以下是1路CAN收發(fā)器的電路圖,其余3路連接方式與此一樣。
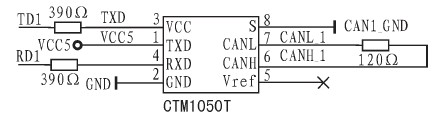
圖8 CAN收發(fā)器電路圖
2.5 以太網(wǎng)電路
主節(jié)點(diǎn)采用RTL8019AS作為以太網(wǎng)控制器。RTL8019AS是一種全雙工即插即用的以太網(wǎng)控制器,已集成了RTL8019內(nèi)核和一個(gè)16 kB的SDR AM存儲(chǔ)器。它兼容RTL8019控制軟件和NE2000 8 bit或16 bit的傳輸。網(wǎng)絡(luò)接口采用帶網(wǎng)絡(luò)變壓器的HR901170A.RTL8019AS使用的片選線為nCS3,地址范圍為0x8300 0000-0x83FF FFFF,由于只有256 B的寄存器,因此可操作地址范圍為0x8300 0000-0x8300 00FF.RTL8019AS使用20M晶振。
3 軟件設(shè)計(jì)
3.1 U-Boot移植
U-Boot(Universal Boot Loader)是遵循GPL條款的開放源碼項(xiàng)目。從FADSROM、8xxROM、PPCBOOT逐步發(fā)展演化而來,支持多種嵌入式操作系統(tǒng)內(nèi)核與微處理器系列。U-Boot的啟動(dòng)過程:初始化目標(biāo)板硬件。給嵌入式操作系統(tǒng)提供板上硬件資源信息,加載、引導(dǎo)嵌入式操作系統(tǒng)。主節(jié)點(diǎn)使用U-Boot-2009-01,它不僅支持ARM-720T內(nèi)核,而且間接提供了對LPC2294的板級(jí)支持。U-Boot的移植過程:首先通過修改star t.s文件設(shè)定系統(tǒng)主頻:然后針對U-Boot所支持的LPC2292硬件資源配置信息作必要的修改,如外部存儲(chǔ)器控制器(EMC)、以太網(wǎng)控制器等的硬件連接信息;接下來修改串口驅(qū)動(dòng)代碼使之與系統(tǒng)主頻匹配;最后通過配置菜單配置U-Boot,主要配置所需要的命令和所要支持的硬件。
3.2 μCLinux移植
LPC2294沒有MMU單元,不能運(yùn)行定制的Linux,只能使用μCLinux.主節(jié)點(diǎn)移植的μCLinux版本號(hào)為2.6.25.從該版本開始,μCLinux支持CAN總線驅(qū)動(dòng)。移植過程如下:
1)打Philips公司針對該芯片提供的官方補(bǔ)丁;
2)修改NANDFLASH部分的驅(qū)動(dòng)程序;
3)配置μCLinux內(nèi)核;
4)交叉編譯內(nèi)核。
所需源碼及補(bǔ)丁文件如表2所示。
表2 所需源碼及補(bǔ)丁文件

移植需要修改的部分驅(qū)動(dòng)代碼:
1)修改arch/arm/math-lpc22xx/head.s因?yàn)?mu;CLinux假設(shè)運(yùn)行前已由BootLoader完成基本硬件初始化工作,因此不再進(jìn)行系統(tǒng)時(shí)鐘頻率、串口初始化等基本硬件的初始化。在head.s文件中包括初始化存儲(chǔ)器控制器、系統(tǒng)分頻器PLL等部分代碼,需要更改這部分代碼,使之與U-Boot中Lowlevel_init.s文件的描述一致。另外μCLinux運(yùn)行前必須由BootLoader將其內(nèi)核裝入內(nèi)存偏移量為0x80000000的地方,因此要保證在μCLinux源碼中的對應(yīng)設(shè)置與啟動(dòng)引導(dǎo)程序的初始化設(shè)置相同。
2)修改NANDFLASH驅(qū)動(dòng)代碼
μCLinux內(nèi)核從2.6.14開始更改了NANDFLASH的驅(qū)動(dòng)代碼,使驅(qū)動(dòng)更加智能化,不再需要寫讀寫函數(shù),只需要實(shí)現(xiàn)讀寫時(shí)序函數(shù)。時(shí)序函數(shù)只關(guān)心如何來發(fā)送指令到NANDFLASH,例如寫指令周期需要對ALE線使能,那么μCLinux下的讀寫函數(shù)會(huì)給這個(gè)時(shí)序函數(shù)發(fā)送一段指令中包含使能ALE線的指令,然后將數(shù)據(jù)寫到數(shù)據(jù)總線上,CLE的實(shí)現(xiàn)與之相類似。
3.3 CAN控制器驅(qū)動(dòng)設(shè)計(jì)
對于微處理器來說,CAN控制器完全是基于事件觸發(fā)的,即CAN控制器會(huì)在本身狀態(tài)發(fā)生改變時(shí),會(huì)將狀態(tài)變化的結(jié)果告訴微處理器。所以微處理器處理CAN控制器時(shí),可以采用中斷的方式,也可以采用輪詢查看CAN控制器狀態(tài)的方式來對CAN控制器做出相應(yīng)的處理。在μCLinux下CAN驅(qū)動(dòng)程序設(shè)計(jì)包括初始化函數(shù)、讀函數(shù)、寫函數(shù)、中斷服務(wù)函數(shù)等設(shè)計(jì),使用文件指針注冊設(shè)備,用戶程序則通過對設(shè)備文件的操作來收發(fā)CAN總線數(shù)據(jù)。CAN驅(qū)動(dòng)程序主要功能包括:
1)CAN控制器的初始化CAN控制器的初始化工作包括硬件使能CAN、設(shè)置管腳連接、軟件復(fù)位、設(shè)置CAN報(bào)警界限、設(shè)置總線波特率、設(shè)置中斷工作方式、設(shè)置CAN驗(yàn)收過濾器的工作方式以及啟動(dòng)等。
2)CAN總線數(shù)據(jù)發(fā)送先將數(shù)據(jù)送到發(fā)送緩沖區(qū),然后對發(fā)送寄存器賦值以啟動(dòng)發(fā)送。CAN控制器只負(fù)責(zé)發(fā)送,并不保證發(fā)送成功。因此要知道是否發(fā)送成功,須查詢TCS狀態(tài)位,或配合發(fā)送成功中斷來判斷。
3)CAN總線數(shù)據(jù)接收CAN總線數(shù)據(jù)接收通過讀取狀態(tài)寄存器查詢當(dāng)前緩沖區(qū)中是否有數(shù)據(jù),當(dāng)有數(shù)據(jù)時(shí)將數(shù)據(jù)讀出并放到CAN接收環(huán)形數(shù)據(jù)存儲(chǔ)區(qū)中,當(dāng)用戶程序需要數(shù)據(jù)時(shí)則從該緩存區(qū)中讀出。
4)CAN中斷處理 通過中斷獲知CAN控制器的當(dāng)前狀態(tài),然后做出相應(yīng)的處理,包括接收中斷處理、發(fā)送中斷處理以及異常中斷處理。中斷處理由中斷服務(wù)函數(shù)實(shí)現(xiàn)。
4 結(jié)論
本文提出一種基于LPC2294微控制器,使用μCLinux作為操作系統(tǒng)的CAN主節(jié)點(diǎn)軟硬件設(shè)計(jì)方案。主節(jié)點(diǎn)通過擴(kuò)展SRAM、FLASH提高了系統(tǒng)的性能,采用帶隔離功能的CAN收發(fā)器增強(qiáng)了CAN總線節(jié)點(diǎn)的抗干擾能力,外接以太網(wǎng)控制器實(shí)現(xiàn)了計(jì)算機(jī)遠(yuǎn)程監(jiān)控。基于μCLinux的軟件系統(tǒng)既提高了系統(tǒng)的穩(wěn)定性、應(yīng)用軟件的開發(fā)效率,又使得眾多的Linux平臺(tái)軟件可容易地移植到主節(jié)點(diǎn),增強(qiáng)系統(tǒng)的功能。通過制作了樣機(jī)并進(jìn)行實(shí)驗(yàn),驗(yàn)證了這一方案的有效性。