
1 引言
長(zhǎng)期以來(lái),由于交流異步電機(jī)結(jié)構(gòu)簡(jiǎn)單、運(yùn)行可靠、制造成本低等諸多優(yōu)點(diǎn),其應(yīng)用越來(lái)越廣泛。但因異步電機(jī)是一個(gè)多變量、非線性、強(qiáng)耦合的被控對(duì)象,磁通和轉(zhuǎn)矩耦合在一起,不能對(duì)磁通和轉(zhuǎn)矩分別控制,因此一直沒(méi)有獲得高性能的交流調(diào)速系統(tǒng),直到70年代才有了突破性發(fā)展。在eblashke和w.flotor提出了“感應(yīng)電機(jī)磁場(chǎng)定向的控制原理”后,文獻(xiàn)[2,3]對(duì)基于逆系統(tǒng)理論和基于微分幾何控制理論的解耦方法,以及如何對(duì)異步電動(dòng)機(jī)解耦做了介紹。在交流調(diào)速理論發(fā)展的同時(shí),人們也在研究交流調(diào)速系統(tǒng)硬件接口電路的設(shè)計(jì)方法。隨著高性能dsp芯片、電力電子器件的出現(xiàn),交流調(diào)速系統(tǒng)的硬件電路設(shè)計(jì)也逐漸形成標(biāo)準(zhǔn)。本文詳細(xì)介紹了一種基于dsp的交流調(diào)速系統(tǒng)硬件接口電路設(shè)計(jì)的方法,對(duì)各個(gè)電路如采樣電路、轉(zhuǎn)速反饋接口電路、驅(qū)動(dòng)電路的主要功能及電路元器件參數(shù)的選擇給出了詳細(xì)的說(shuō)明,實(shí)驗(yàn)證明這種方法是可行的。
2 主電路設(shè)計(jì)
本文的設(shè)計(jì)實(shí)驗(yàn)對(duì)象為:額定功率為55kw,額定電壓為440v,額定電流為90a,額定轉(zhuǎn)速為1800r/min的異步電機(jī)。調(diào)速系統(tǒng)原理圖如圖1所示。
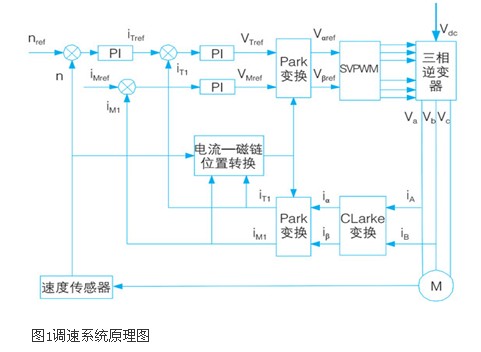
本設(shè)計(jì)選取了tms320f2812系列定點(diǎn)dsp作為電動(dòng)機(jī)控制主芯片,圍繞它展開(kāi)了硬件接口電路的設(shè)計(jì)。具體包括:電流采樣電路的設(shè)計(jì),速度檢測(cè)環(huán)節(jié)的設(shè)計(jì),功率開(kāi)關(guān)器件的驅(qū)動(dòng)電路設(shè)計(jì)等幾個(gè)方面。因?yàn)楸疚囊杂布O(shè)計(jì)為主,故在其他方面如park變換,clarke變換等軟件設(shè)計(jì)方面不予以贅言。
3 電流采樣電路的設(shè)計(jì)
3.1電流采樣電路
電流采樣電路的目的是在閉環(huán)控制系統(tǒng)中實(shí)時(shí)得到反饋的交流電動(dòng)機(jī)定子電流信號(hào),即將傳感器檢測(cè)到的電流信號(hào)進(jìn)行放大,偏置輸出到dsp的a/d接口,將電流信號(hào)轉(zhuǎn)換成dsp可識(shí)別的數(shù)字信號(hào),以方便dsp進(jìn)行處理。因?yàn)楸菊n題研究的是三相平衡系統(tǒng)ua+ub+uc=0,故只需要檢測(cè)其中兩路電流即可。
3.2電流傳感器的選擇
根據(jù)異步電機(jī)的數(shù)學(xué)模型可知,定子電流檢測(cè)的精度和實(shí)時(shí)性是整個(gè)矢量控制系統(tǒng)精度的關(guān)鍵。因此,對(duì)電流的檢測(cè)要求精度高和速度快,顯然普通的電流傳感器很難滿足要求。根據(jù)設(shè)計(jì)要求,試驗(yàn)電動(dòng)機(jī)的額定電流為90a,考慮兩倍的安全裕量,實(shí)際定子電流取到180a。本實(shí)驗(yàn)選取深圳市貝爾特電子有限技術(shù)公司出品的csns200m-002電流傳感器。該電流傳感器的原邊電流為200a,與預(yù)選的電流值(180a)很接近,滿足選取原則。
3.3運(yùn)算放大器的選擇
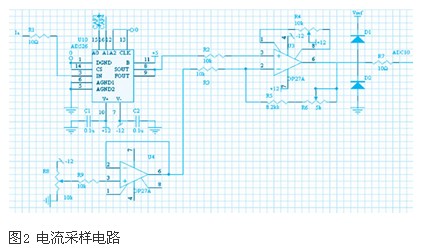
本文所研究設(shè)計(jì)的系統(tǒng)中電機(jī)線電流變化范圍從0a~90a,變化范圍很大。如果在如此寬的范圍之內(nèi),電流信號(hào)采用一個(gè)固定的放大倍數(shù),精度堪憂。所以初級(jí)采用可編程放大器ad526,通過(guò)調(diào)節(jié)放大倍數(shù)來(lái)滿足要求,并由ad526產(chǎn)生正的1.65v的電壓信號(hào)。由于tms320f2812要求的電壓為3.3v,所能識(shí)別的僅是正的電壓值,而電流信號(hào)為正負(fù)交替的交變信號(hào),因此,需要有一個(gè)減法比較環(huán)節(jié)將正、負(fù)信號(hào)做減法運(yùn)算,由比較環(huán)節(jié)最終輸出的電壓值就是可以為tms320f2812所能使用的電壓值。
設(shè)計(jì)中先將霍爾的電流信號(hào)通過(guò)電阻轉(zhuǎn)化為電壓信號(hào),為了防止電壓過(guò)高或過(guò)低,設(shè)計(jì)了由二極管構(gòu)成的限幅電路,由于電流反饋具有較大的噪音紋波,因而采用低通濾波電路。考慮到現(xiàn)場(chǎng)環(huán)境的影響以及其他未可預(yù)知的干擾,在本設(shè)計(jì)中,選取了op27型放大器。
3.4采樣電阻的計(jì)算
由電流傳感器的變比2000:1,及原邊電流值大小:200a,ad526輸出電壓為1.65v,可以求出采樣電阻r9《16.5ω,故可取r9=10ω。其中,a相電流的采樣電路如圖2所示,b相與其相同。
4 轉(zhuǎn)速反饋接口電路設(shè)計(jì)
起動(dòng)的快速性是電動(dòng)機(jī)的基本要求。以目前無(wú)位置傳感器控制技術(shù)發(fā)展的情況來(lái)看,由于低速特別是起動(dòng)瞬間反電動(dòng)勢(shì)非常低,控制精度和性能并不理想。因此有必要保留位置速度傳感器。
4.1編碼器的選擇
與旋轉(zhuǎn)變壓器相比,光電編碼器信號(hào)處理簡(jiǎn)單、噪聲容限大、易于實(shí)現(xiàn)高分辨率。特別是在選用tms320f2812作為控制器的情況下,光電編碼器可以通過(guò)dsp的qep接口十分方便地實(shí)現(xiàn)與控制器的連接。
本設(shè)計(jì)選用了sumtak株式會(huì)社產(chǎn)的lhe-055-2000型帶u、v、w信號(hào)增量式光電編碼器。它輸出12路信號(hào):a、b、z、u、v、w以及他們的補(bǔ)信號(hào)a’、b’、z’、u’、v’、w’。其中a、b、a’、b’為占空比為50%的方波,2000p/r。u、v、w、u’、v’、w’以轉(zhuǎn)子每360°電角度為一個(gè)循環(huán)周期。u、v、w(或u’、v’、w’)相差120°,按照u、v、w(或u’、v’、w’)不同組合,可以把一對(duì)轉(zhuǎn)子磁極分為6個(gè)等距區(qū)間。所以在電機(jī)起動(dòng)時(shí),可以先根據(jù)u、v、w信號(hào)按照無(wú)刷直流電動(dòng)機(jī)控制,使電機(jī)運(yùn)行起來(lái),待檢測(cè)到z信號(hào),按照事先確定好的轉(zhuǎn)子磁極位置確定定子磁鏈初值,然后轉(zhuǎn)入直接轉(zhuǎn)矩控制。通常把z信號(hào)定位于a相繞組反電動(dòng)勢(shì)的過(guò)零點(diǎn),此時(shí),轉(zhuǎn)子磁極軸線正好與a相繞組軸線重合。
其中a、b信號(hào)分別通過(guò)qep1、qep2接到lf2407a上;而z信號(hào)通過(guò)cap3接到lf2407a上;u、v、w是以60°電角度為周期的數(shù)字信號(hào),分別通過(guò)qep1、qep2、qep3接到lf2407a上。
4.2 26c32的使用
由于光電編碼器內(nèi)部集成了26c31芯片,所以由它引出了a、b、z、u、v、w以及他們的補(bǔ)信號(hào)a’、b’、z’、u’、v’、w’以及地線和電源線,但是這些線不能直接接到dsp上,這里就需要用26c32來(lái)接接收由26c31引出的所有線路。
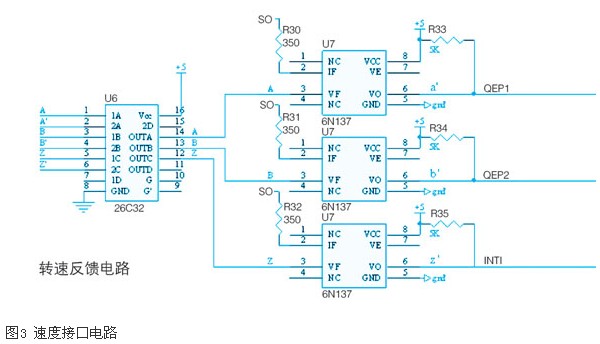
由于26c32可以同時(shí)接受四路信號(hào),所以,a、b、z、a’、b’、z’信號(hào)可以同時(shí)與26c32的ina1、ina2、inb1、inb2、inc1、inc2端相連,輸出端outa、outb、outc端分別接到光耦6n137芯片上輸出再與tms320f2812的qep1、qep2、int1相連,以完成轉(zhuǎn)速環(huán)節(jié)的接口電路。
本來(lái)光電脈沖編碼器的a、b輸出可以直接接到tms320f2812的qep1、qep2上,但為保護(hù)起見(jiàn),還得加上高速光電隔離。圖3中是a路信號(hào)的接口電路,b、z路接口電路與此相同。它主要由ti公司的光耦6n137組成。這里用快速光耦的原因是:碼盤輸出的信號(hào)的頻率最高接近60khz,而普通光耦的開(kāi)通和關(guān)斷延時(shí)就有幾個(gè)微秒,無(wú)法滿足要求。在tms320f2812中將捕獲單元配置成正交編碼脈沖模式,在這種模式下,兩個(gè)16位通用定時(shí)器t1和t2可工作于qep模式的16位或32位雙向計(jì)數(shù)器。qep電路直接處理光電編碼器輸出的兩路相位相差90°的兩路脈沖,只要將這兩路脈沖分別接到qep1、qep2即可。qep模式對(duì)兩路脈沖的前后沿均進(jìn)行計(jì)數(shù),無(wú)需外部的倍頻電路。而且它能根據(jù)兩路脈沖的先后次序判別電機(jī)的轉(zhuǎn)向,省去了外部辯向電路,增加了系統(tǒng)的可靠性。在信號(hào)隔離功能之外,光耦還起到濾除脈沖尖峰和毛刺,增強(qiáng)抗干擾能力。
5 驅(qū)動(dòng)電路的設(shè)計(jì)
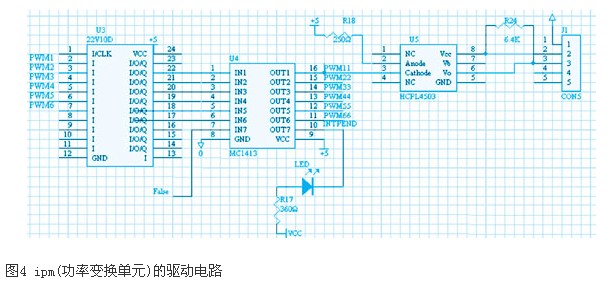
ipm的驅(qū)動(dòng)隔離電路如圖4所示。盡管在lf2407a輸出的pwm中已經(jīng)加入了死區(qū)時(shí)間,本系統(tǒng)設(shè)計(jì)中依然從硬件方面采取措施,如圖4所示,gel器件22v10d在lf2407a之后,保證同一相的上、下橋臂的互鎖。為了增強(qiáng)驅(qū)動(dòng)信號(hào)的帶負(fù)載能力,在22v10d的輸出之后串入一片緩沖器——mc1413。當(dāng)驅(qū)動(dòng)信號(hào)發(fā)生錯(cuò)誤,lf2407a發(fā)出一個(gè)錯(cuò)誤信號(hào)false,并點(diǎn)亮發(fā)光二極管ledintpend。緩沖器mc1413的輸出經(jīng)過(guò)快速光耦hcpl4503隔離,驅(qū)動(dòng)ipm。圖中只畫出了a相上橋臂的電路,其他橋臂的電路與此相同。hcpl4503下面的光耦til117的一次側(cè)接到ipm的故障輸出引腳5上。
6 結(jié)束語(yǔ)
基于以上對(duì)交流調(diào)速系統(tǒng)硬件接口電路設(shè)計(jì)方法的研究,我們進(jìn)行了異步電機(jī)的矢量控制實(shí)驗(yàn)。實(shí)驗(yàn)結(jié)果證明了該系統(tǒng)能可靠穩(wěn)定運(yùn)行。同時(shí)該系統(tǒng)對(duì)于過(guò)流有很快的響應(yīng)性,對(duì)系統(tǒng)有保護(hù)作用,實(shí)踐證明該設(shè)計(jì)方法符合控制設(shè)計(jì)要求,具有一定的電路設(shè)計(jì)典型性并可應(yīng)用在交流調(diào)速系統(tǒng)中。