《控制與傳動》2012年第2期 供稿
1引言
本文以污水處理的工藝流程為線索,介紹了監(jiān)控系統(tǒng)的整體設(shè)計方案、各個分布式控制站的設(shè)計、上位監(jiān)控畫面的制作以及重難點控制策略的研究。文中著重講述了PLC、軟啟動器與變頻、PID等技術(shù)在污水處理中的典型應(yīng)用。在該污水處理中,為了達(dá)到控制溶解氧(DO)含量、配水井液位等在一定得范圍內(nèi)的目的,我們采用PID控制、變頻調(diào)速等技術(shù)來實現(xiàn)對風(fēng)機(jī)和水泵的轉(zhuǎn)速的調(diào)節(jié)。同時根據(jù)液位不同對使用設(shè)備的臺數(shù)進(jìn)行控制。為了解決污水處理中大功率設(shè)備啟動所帶來的問題,該系統(tǒng)采用了軟啟動器拖動電動機(jī)。同時為了解決設(shè)備長期運行帶來的問題,采用輪換使用幾臺泵或風(fēng)機(jī)。本文以實際系統(tǒng)為例,介紹污水處理廠自動控制的方法與策略,具有一定實踐指導(dǎo)意義。
2污水處理工藝流程介紹
2.1污水處理的基本工藝方法
污水處理就是采用各種技術(shù)與手段,將污水中所含的污染物質(zhì)分離去除、回收利用,或?qū)⑵滢D(zhuǎn)化為無害物質(zhì),使水得到凈化。
現(xiàn)代污水處理技術(shù),按處理程度劃分,一般分為三級處理:
一級處理,又稱物理處理,主要是去除污水中呈懸浮狀態(tài)的固體污染物質(zhì),經(jīng)過一級處理后的污水,可去除50%左右的懸浮物,BOD一般只能去除30%左右,達(dá)不到排放標(biāo)準(zhǔn)。
二級處理,又稱生化處理,它是城市污水處理廠的核心,主要去除水中呈膠體和溶解狀態(tài)的有機(jī)污染物。經(jīng)二級處理后,BOD的去除率可達(dá)90%以上,污水中BOD值可降至20-30mg/L,有機(jī)污染物達(dá)到國家規(guī)定的排放標(biāo)準(zhǔn)。
三級處理,又稱深度處理,其目的在于進(jìn)一步去除二級處理未能去除的污染物質(zhì),其中包括微生物未能降解的有機(jī)物和氮、磷等能夠?qū)е滤w富營養(yǎng)化的可溶性無機(jī)物質(zhì)。
生物法具有凈化能力強(qiáng)、費用低廉、運行可靠性好等優(yōu)點,是污水處理的主要方法,在污水處理領(lǐng)域中占有重要地位。我國現(xiàn)階段的城市污水處理以生物法為主,以物理法和化學(xué)法為輔。以生物法為主的處理工藝主要有活性污泥法、A/O法、A2/O法、SBR法、MSBR法、UNITANK法、氧化溝等,它們均具有同步降解BOD5和脫氮除磷的作用。
2.2本系統(tǒng)采用的工藝介紹
根據(jù)實際情況,并綜合考慮各種工藝的優(yōu)缺點,該污水處理廠采用A2/C氧化溝工藝。
2.2.1A2/C氧化溝工藝簡介
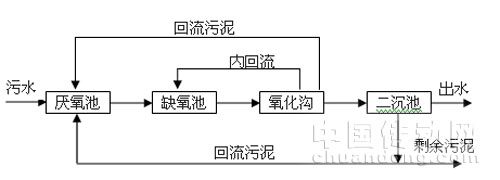
圖2.1A2/C氧化溝工藝流程圖
設(shè)置厭氧、缺氧段的Carrousel氧化溝(文中簡稱:A2/C氧化溝)具有生物脫氮除磷功能,是目前城市生活污水處理的主流工藝之一。它是在Carrousel2000氧化溝的基礎(chǔ)上增加前置的厭氧段形成的。在污水脫氮除磷的工藝設(shè)計中必須具備厭氧、缺氧、好氧3個基本條件,但是在實施過程中由于所需的處理構(gòu)筑物多、
污泥回流量大,從而造成投資大、能耗多、運行管理復(fù)雜。A2/C氧化溝將厭氧、缺氧、好氧三個過程集中在一個池內(nèi)完成,各部分用隔墻分開自成體系,但彼此又有聯(lián)系。該工藝充分利用污水在氧化溝內(nèi)循環(huán)流動的特性,把好氧區(qū)和缺氧區(qū)有機(jī)結(jié)合起來,實現(xiàn)無動力回流,節(jié)省了去除硝酸鹽氮所需混合液回流的能量消耗。

圖2.2A2/C氧化溝平面布置圖
該污水處理系統(tǒng)為兩個A2/C氧化溝并行運行。經(jīng)配水井分配后的污水進(jìn)入氧化溝前段的厭氧池,與來自污泥泵房的回流污泥混合,在厭氧條件下,除磷菌可將儲存在菌體內(nèi)的聚磷分解,將磷酸鹽釋放到水中。厭氧池分為3格,每格都設(shè)有水下攪拌器以防止污泥沉淀。經(jīng)厭氧釋磷后的污水進(jìn)入缺氧段進(jìn)行反硝化脫氮,缺氧段設(shè)計成環(huán)流形式,強(qiáng)化脫氮效果,反硝化后的污水通過設(shè)置在一側(cè)的渠道進(jìn)入氧化溝。氧化溝的充氧機(jī)械采用倒傘形曝氣機(jī),可根據(jù)池內(nèi)DO測定值控制調(diào)節(jié)堰門出水、改變曝氣機(jī)轉(zhuǎn)速以達(dá)到調(diào)節(jié)溶解氧的目的。在氧化溝內(nèi),污水進(jìn)一步去除有機(jī)物并將NH3-N氧化成NO2和NO3。同時聚磷菌在好氧條件下過量攝取污水中的磷,強(qiáng)化出水水質(zhì)。而且在好氧段末設(shè)置內(nèi)回流渠,經(jīng)過好氧硝化的污水進(jìn)入缺氧段,由于末端的溶解氧減少到最低程度,有效的防止缺氧池氧過量的問題,可以取得最好的反硝化效果。經(jīng)過處理后的污水經(jīng)過出水口進(jìn)入二沉池進(jìn)行沉淀處理。
2.2.2本系統(tǒng)工藝流程
桂陽縣污水處理廠包括污水處理和污泥處理兩個系統(tǒng)。污水處理系統(tǒng)包括進(jìn)水井、粗格柵間、提升泵房、細(xì)格柵間、曝氣沉砂池、鼓風(fēng)機(jī)房、氧化溝、二沉池、紫外線消毒渠、出水渠等,污泥處理系統(tǒng)包括污泥回流泵房、脫水機(jī)房等幾部分。
污水經(jīng)污水排放管進(jìn)入進(jìn)水井,由進(jìn)水井流經(jīng)粗格柵,濾除大塊固體懸浮物后,再由提升泵將污水提升到細(xì)格柵,濾除細(xì)小的漂浮物和浮渣,然后經(jīng)計量渠流入曝氣沉砂池,進(jìn)行砂水分離,去除水中密度較大的無機(jī)顆粒,以保護(hù)后續(xù)處理設(shè)備的正常運行。然后污水進(jìn)入氧化溝,進(jìn)行生化處理。經(jīng)生化處理后的污水進(jìn)入二沉池進(jìn)行污泥沉淀,經(jīng)過污泥沉淀后的污水經(jīng)紫外線消毒后到出水渠,最后排放。二沉池分離的一部分生物活性污泥回流到生化反應(yīng)池,另一部分剩余污
泥流經(jīng)污泥泵房進(jìn)入污泥處理系統(tǒng),剩余污泥進(jìn)入污泥貯池,最后經(jīng)進(jìn)污泥泵進(jìn)入脫水機(jī)房進(jìn)行脫水處理并外運。

圖2.3韶陽縣污水處理廠總體工藝流程圖
3控制系統(tǒng)方案設(shè)計
3.1設(shè)計原則
1.系統(tǒng)性能穩(wěn)定,安全可靠。
2.操作簡單,維護(hù)方便
3.運行經(jīng)濟(jì)節(jié)能,維護(hù)費用低。
4.易于擴(kuò)展
5.性能價格比高
3.2設(shè)計思想
本系統(tǒng)采用工控機(jī)+可編程序控制器(PLC)+現(xiàn)場儀表的控制方式。現(xiàn)場儀表將現(xiàn)場的信號采集并傳輸至PLC中,PLC作為主要的現(xiàn)場控制單元,工控機(jī)用于監(jiān)視和控制PLC及現(xiàn)場設(shè)備的狀態(tài)。各個設(shè)備均能實現(xiàn)現(xiàn)地、遠(yuǎn)程、遠(yuǎn)程手動三種控制方式。
3.3系統(tǒng)結(jié)構(gòu)圖
整個控制系統(tǒng)由中控室、PLC控制站、現(xiàn)場儀表及現(xiàn)場的控制柜構(gòu)成。系統(tǒng)的結(jié)構(gòu)圖如圖3.1所示:
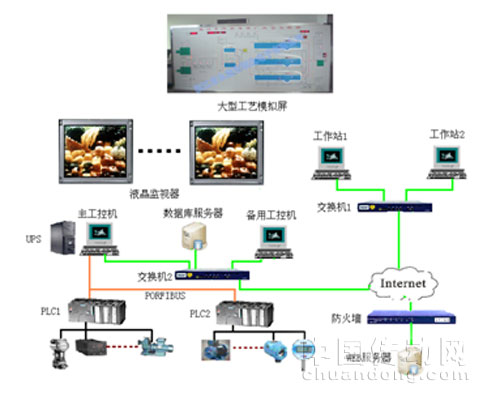
圖3.1監(jiān)控系統(tǒng)結(jié)構(gòu)圖
3.4控制系統(tǒng)各部分功能
3.4.1現(xiàn)場電控柜
現(xiàn)場控制柜的主要作用是完成現(xiàn)場控制功能和與PLC連接。各個現(xiàn)場控制柜能夠完成手動控制設(shè)備啟停的功能,是典型的繼電器控制。現(xiàn)場控制相對于PLC自動控制和中央監(jiān)控室控制具有最高的優(yōu)先級。只有將選擇開關(guān)撥到遠(yuǎn)程控制之后,PLC控制和中央監(jiān)控室的上位控制才起作用。所以在進(jìn)行自動控制調(diào)試前,首先要完成對現(xiàn)場各控制柜的調(diào)試,在保證現(xiàn)場設(shè)備安全的前提下才能進(jìn)行遠(yuǎn)程控制。
3.4.2PLC控制站
該污水處理廠的自動化監(jiān)控系統(tǒng)共設(shè)兩個PLC控制站。氧化溝單獨一個控制站,其余部分用一個控制站。PLC站的主要作用是采集現(xiàn)場的信號并控制設(shè)備的運行。現(xiàn)場的信號包括液位、流量、溫度等工藝信號和設(shè)備的運行狀態(tài)。當(dāng)現(xiàn)場控制柜的模式選擇開關(guān)選擇到“遠(yuǎn)程”時,操作人員不能使用現(xiàn)場控制柜上的啟停按鈕來控制設(shè)備的運行。這時,PLC會根據(jù)程序自動或者根據(jù)上位監(jiān)控系統(tǒng)給出的信號控制設(shè)備的運行。
3.4.3上位監(jiān)控系統(tǒng)
該污水處理廠的自動化監(jiān)控系統(tǒng)的上位監(jiān)控系統(tǒng)包括一個工程師站和一個操作員站。工程師站既能完成系統(tǒng)組態(tài)、調(diào)試及控制參數(shù)的在線修改和設(shè)置等,又能完成對整個污水處理廠的數(shù)據(jù)采集、監(jiān)控,報表及打印等功能;操作員站主要完成對整個污水處理廠的數(shù)據(jù)采集、監(jiān)控等功能。在系統(tǒng)正常工作時,工程師站可兼作操作員站,方便了監(jiān)視與操作,并提高了系統(tǒng)的可靠性。污水處理的各個工段的工藝數(shù)據(jù)以及各個設(shè)備的運行狀態(tài)通過PLC采集并在上位機(jī)監(jiān)控畫面上顯示,操作人員可以查看全廠各個設(shè)備的運行情況。同時可以對報表存檔打印,顯示實時報警和歷史報警等,方便操作人員進(jìn)行工藝分析和查找故障。當(dāng)現(xiàn)場控制柜的模式選擇開關(guān)選到“自動”時,在上位機(jī)監(jiān)控畫面中可以選擇設(shè)備為“手動”運行狀態(tài),然后手動控制設(shè)備的運行。
4控制系統(tǒng)硬件設(shè)計
4.1PLC1站設(shè)計
PLC1站主要負(fù)責(zé)粗格柵、提升泵、細(xì)格柵、曝氣沉沙池等位置儀表的數(shù)據(jù)采集及設(shè)備的遠(yuǎn)程監(jiān)控。
4.1.1PLC1實現(xiàn)的功能
在粗格柵間共設(shè)有2個粗格柵,粗格柵的主要作用是去除污水中大塊漂浮物。粗格柵能夠根據(jù)PLC程序或上位機(jī)設(shè)定的時間實現(xiàn)輪流自動啟停。與粗格柵關(guān)聯(lián)的設(shè)備螺旋壓榨機(jī)負(fù)責(zé)將粗格柵過濾出的懸浮物脫水、粉碎。在控制時,為確保設(shè)備安全,應(yīng)使粗格柵與螺旋壓榨機(jī)聯(lián)動,以防止螺旋壓榨機(jī)空轉(zhuǎn)。聯(lián)動順序為:螺旋壓榨機(jī)→粗格柵,關(guān)機(jī)順序相反。螺旋壓榨機(jī)在粗格柵停止之后再運行30-60s。螺旋壓榨機(jī)故障時,粗格柵停止運行。
提升泵房水泵主要用來將粗格柵間流出的污水提升到細(xì)格柵間。在提升泵房,需要測量和控制的是四臺提升泵的運行狀態(tài)以及它們的啟停。提升泵房有四臺提升泵,其中三臺軟啟動泵,一臺變頻調(diào)速泵,由變頻器來控制。
設(shè)置細(xì)格柵的目的,在于攔截污水中的大量細(xì)小的漂浮物。對于細(xì)格柵的控制,可通過現(xiàn)場控制柜實現(xiàn)手動控制,也可對細(xì)格柵進(jìn)行遠(yuǎn)程控制啟、停。細(xì)格柵的控制也要和輸送機(jī)實現(xiàn)聯(lián)動,以保證設(shè)備安全。其控制的方法與粗格柵相同。
沉砂池的作用是為了避免砂粒對處理工藝和設(shè)備帶來的不利影響。砂粒進(jìn)入生化池內(nèi)會使污泥刮板過度磨損,縮短更換周期。沉砂池內(nèi)部有一臺橋式吸砂機(jī)、兩臺吸砂泵和一臺沙水分離器,其主要作用是將砂粒吸走,需要對其進(jìn)行監(jiān)測和控制。吸砂機(jī)和吸砂泵的啟停,可由現(xiàn)場控制柜手動控制,也可以由中央控制室的上位機(jī)進(jìn)行遠(yuǎn)程控制。吸砂泵與砂水分離器聯(lián)動運行。聯(lián)動順序:沙水分離器→吸砂泵,關(guān)機(jī)順序相反。羅茨給曝氣池鼓風(fēng),羅茨風(fēng)機(jī)由PLC根據(jù)時間控制啟停,自動輪換。
4.1.2控制柜設(shè)計
PLC1站采用CPU315-2DP。根據(jù)控制要求,PLC1共需數(shù)字量輸入150點,數(shù)字量輸出40點,模擬量輸入26路,模擬量輸出10路,另外預(yù)留20%的I/O點備用。PLC1站需要6塊32點DI,2塊32路DO,4塊8通道AI,2塊8通道AO。由于一個機(jī)架最多安裝8個信號模塊,因此需要設(shè)置一個擴(kuò)展機(jī)架。在這里采用IM365近程擴(kuò)展一個機(jī)架。
4.2PLC2站設(shè)計
PLC2站主要負(fù)責(zé)A2/C氧化溝處儀表的數(shù)據(jù)采集及設(shè)備的遠(yuǎn)程監(jiān)控。由于厭氧池、缺氧池、氧化溝內(nèi)的需要采集的數(shù)據(jù)和控制的設(shè)備比較多,所以單獨設(shè)置一個PLC控制站。
4.2.1PLC2實現(xiàn)的功能
PLC2主要實現(xiàn)對氧化溝內(nèi)的曝氣機(jī)、閘門啟閉機(jī)、潛水推流器、電動調(diào)節(jié)堰門、內(nèi)回流旋轉(zhuǎn)門等設(shè)備進(jìn)行控制。在這里對曝氣機(jī)的控制室通過變頻器實現(xiàn)的。在PLC內(nèi)部對溶解氧含量進(jìn)行PID運算,輸出4-20mA到變頻器的模擬量控制端子,調(diào)節(jié)曝氣機(jī)轉(zhuǎn)速,從而達(dá)到控制溶解氧含量的目的。
4.2.2控制柜設(shè)計
在PLC站2也采用S7300PLC。PLC站2需要根據(jù)溶解氧的濃度通過PID運算來調(diào)節(jié)曝氣機(jī)轉(zhuǎn)速,同時需要控制潛水推流器等眾多設(shè)備,為了滿足要求采用浮點數(shù)運算速度較高的315-2DPCPU。根據(jù)控制要求,PLC2共需數(shù)字量輸入156點,數(shù)字量輸出38點,模擬量輸入20路,模擬量輸出12路,另外預(yù)留20%的I/O點備用。PLC1站需要6塊32點DI,2塊32點DO,4塊8通道AI,2塊8通道AO。由于一個機(jī)架最多安裝8個信號模塊,因此需要設(shè)置一個擴(kuò)展機(jī)架。在這里采用IM365近程擴(kuò)展一個機(jī)架。
5控制系統(tǒng)軟件設(shè)計
該污水處理廠自動化監(jiān)控系統(tǒng)軟件設(shè)計包含PLC程序開發(fā)和上位監(jiān)控界面的開發(fā)。
5.1PLC編程
在該系統(tǒng)中我們通過在工控機(jī)上安裝STEP7編程軟件進(jìn)行程序的編制和調(diào)試工作。并通過在PC機(jī)中插入CP5611板卡,連接PLC下載程序并監(jiān)視程序的運行及查找故障。
5.1.1編程軟件介紹
STEP7編程軟件用于西門子系列工控產(chǎn)品包括SIMATICS7、M7、C7和基于PC的WinAC,是供它們編程、監(jiān)控和參數(shù)設(shè)置的標(biāo)準(zhǔn)工具,是SIMATIC工業(yè)軟件的重要組成部分。STEP7具有以下功能:硬件配置和參數(shù)設(shè)置、通訊組態(tài)、編程、測試、啟動和維護(hù)、文件建檔、運行和診斷功能等[7]。
5.1.2設(shè)計過程
首先,創(chuàng)建工程。STEP7安裝成功后,將在Windows桌面上出現(xiàn)SIMATICManager(SIMATIC管理器)圖標(biāo),雙擊該圖標(biāo)后,進(jìn)入STEP7的項目管理器。然后點擊“文件”>“新建”,選擇創(chuàng)建一個新項目,輸入sewerage作為新項目的名稱并選擇項目文件的存放位置,然后點擊OK。
然后,進(jìn)行硬件組態(tài)。進(jìn)入STEP7的項目管理器之后,在瀏覽窗口中右擊項目名稱,在快捷菜單中選擇“InsertNewObject”>“SIMATIC300Station”,并選擇“Rename”,給站1更名為“others”。同樣的插入第二個站“yanghuagou”。
下面我們以PLC1站為例看一下站內(nèi)硬件組態(tài)的過程。在SIMATICManager的瀏覽窗口中鼠標(biāo)左鍵單擊站名“others”,在右邊的顯示窗口中會出現(xiàn)Hardware(硬件組態(tài))圖標(biāo)。雙擊該圖標(biāo)進(jìn)入硬件組態(tài)的界面,如圖5.1所示:
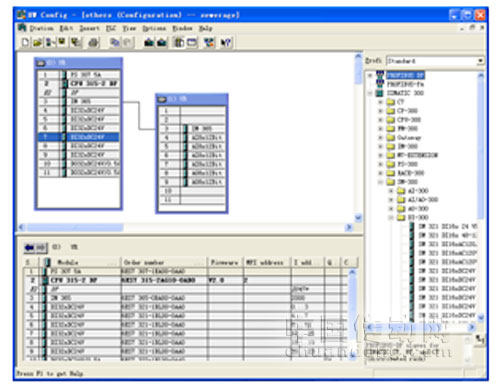
圖5.1硬件組態(tài)圖
在STEP7中,可以通過簡單的拖放操作來完成主機(jī)架的配置。在配置過程中,添加到主機(jī)架中的模塊的定貨號應(yīng)該與實際的硬件一致。在硬件目錄中選中一個模塊,目錄下方的窗口會顯示模塊的定貨號和對模塊的描述。插入主機(jī)架后,分別向機(jī)架中的1號插槽添加電源、2號插槽添加CPU。硬件目錄中的某些CPU型號有多種操作系統(tǒng)(Firmware)版本,在添加CPU時,CPU的型號和操作系統(tǒng)版本都要與實際的硬件一致。在這里我們電源選擇PS3075A,CPU選擇CPU315-2DP。在添加CPU時會出現(xiàn)對話框選擇CPU的站地址,在這里我們用選擇2。4—11號槽中可以添加信號模塊、功能模塊、通訊處理器等,上述模塊分別在硬件目錄的SM-300、FM-300和CP-300中。如圖我們添加了6個32點的數(shù)字量輸入模塊和2個32點的數(shù)字量輸出模塊。硬件組態(tài)的模塊的訂貨號以及位置必須與實際的硬件是一致的。
在主機(jī)架的3號插槽插入IM365用于本地擴(kuò)展。插入另外一個機(jī)架,并在3號槽插入IM365。這時該擴(kuò)展機(jī)架上的IM365會與主機(jī)架上的IM365自動連接。在擴(kuò)展機(jī)架上插入4個8路的模擬量輸入模塊和2個8路的模擬量輸出模塊。在硬件組態(tài)窗口的下面有詳細(xì)信息窗口,其中顯示了相應(yīng)的模塊的地址。各模塊是自動編址的,我們也可以修改各個模塊的地址。方法是雙擊想要修改的模塊,在對話框中選擇Address標(biāo)簽頁,然后輸入相應(yīng)的地址即可。
在配置過程中,STEP7可以自動檢查配置的正確性。當(dāng)硬件目錄中的一個模塊被選中時,機(jī)架中允許插入該模塊的槽會變成綠色,而不允許該模塊插入的槽顏色無變化。將選中的模塊拖到不能插入該模塊的槽時,會提示不能插入的原因。硬件組態(tài)完成后,進(jìn)行存盤并編譯。這時硬件組態(tài)的參數(shù)將會保存到系統(tǒng)數(shù)據(jù)塊(SDB)中。這時系統(tǒng)硬件組態(tài)完成了,可以將選擇的組態(tài)下載到PLC中。
完成硬件組態(tài)后,就可以進(jìn)行程序的編制。西門子S7系列PLC采用的是“塊式程序結(jié)構(gòu)”,用“塊”的形式來管理用戶編寫的程序及程序運行所需要的數(shù)據(jù),組成完整的PLC應(yīng)用程序系統(tǒng)(軟件系統(tǒng))。“塊”分為數(shù)據(jù)塊和邏輯塊,它們都存放在Blocks目錄下[8]。這些塊主要包括組織塊(OB)、數(shù)據(jù)塊(DB)、功能(FC)、功能塊(FB)和背景數(shù)據(jù)塊(DI)。我們選擇的程序語言是梯形圖(LAD)。
程序編制完成后需要對程序進(jìn)行下載和調(diào)試。
5.1.3典型程序介紹

該程序段主要實現(xiàn)模擬量數(shù)據(jù)的轉(zhuǎn)化以及傳感器故障報警。在污水處理過程中,需要實時的采集和顯示溫度、流量、液位等模擬量信號。該程序的目的就是將采集的信號轉(zhuǎn)化為原始的工程量進(jìn)行顯示。由于在污水處理的現(xiàn)場存在信號干擾,所以將內(nèi)碼值在+200和-200之間的輸入視為干擾,不進(jìn)行處理。然后將該內(nèi)碼值送給FC105處理。FC105SCALE功能是接收一個整型值(INT),并將其轉(zhuǎn)換為以工程單位表示的介于下限和上限(LO_LIM和HI_LIM)之間的實型值。
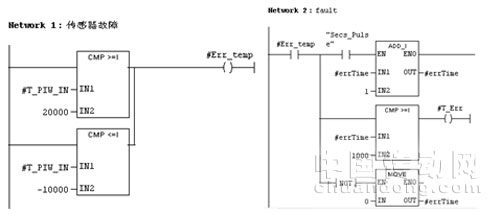
該程序檢測溫度傳感器是否故障。當(dāng)一個溫度模擬量對應(yīng)的整數(shù)值在-1000-2000范圍之外,我們視為傳感器故障。為了防止干擾引發(fā)的誤判斷,我們對故障時間進(jìn)行計時。只有當(dāng)時當(dāng)該時間超過1000秒時,我們才對其進(jìn)行報警處理。當(dāng)時間未到,出現(xiàn)了正常信號時,需要對計時清零。
5.2上位組態(tài)畫面
本系統(tǒng)采用SIMATICWinCC組態(tài)軟件對系統(tǒng)進(jìn)行監(jiān)控。用戶登陸系統(tǒng)后看到主畫面顯示整個污水處理廠的工藝流程。通過主畫面上的幾個按鈕可以進(jìn)入各個分畫面。分畫面包括工藝流程的各個部分以及報警、趨勢畫面。監(jiān)控畫面包括系統(tǒng)中的各個開關(guān)量和模擬量。監(jiān)控系統(tǒng)還可以完成實時報警顯示和報表打印。
5.2.1WinCC簡介
西門子公司的WinCC是WindowsControlCenter(視窗控制中心)的簡稱。它集成了SCADA、組態(tài)、腳本(Script)語言和OPC等先進(jìn)技術(shù),為用戶提供了Windows操作系統(tǒng)(Windows2000或XP)環(huán)境下使用各種通用軟件的功能。WinCC繼承了西門子公司的全集成自動化(TIA)產(chǎn)品的技術(shù)先進(jìn)和無縫集成的特點。WinCC運行于個人計算機(jī)環(huán)境,可以于多種自動化設(shè)備及控制軟件集成,具有豐富的設(shè)置項目、可視窗口和菜單選項,使用方式靈活,功能齊全。用戶在其友好的界面進(jìn)行組態(tài)、編程和數(shù)據(jù)管理,可形成所需要的操作畫面、控制畫面、監(jiān)視畫面、報警畫面、實時趨勢曲線、歷史趨勢曲線和打印報表等。
5.2.2設(shè)計思路
程序運行時首先進(jìn)入主畫面。主畫面顯示污水處理的整個工藝流程,同時在主畫面中顯示各個流程關(guān)鍵的開關(guān)量和模擬量的狀態(tài),如設(shè)備的狀態(tài)、閘門前后液位、流量等。如果想了解現(xiàn)場更加詳細(xì)的狀態(tài)以及對設(shè)備進(jìn)行遠(yuǎn)程控制需要進(jìn)入工藝流程的分畫面。分畫面中可以顯示實時報警、趨勢曲線。同時對重要模擬量進(jìn)行歸檔,以便形成歷史趨勢曲線,便于以后進(jìn)行查看和分析。如果用戶想對畫面進(jìn)行操作,如設(shè)備控制、參數(shù)更改等,必須輸入用戶名和密碼進(jìn)行登陸,以防止其他人員的誤操作。在登陸狀態(tài)下,不同的用戶具有不同的權(quán)限。在中央監(jiān)控室可以對現(xiàn)場的設(shè)備進(jìn)行操作,參數(shù)采集以及現(xiàn)場儀表的數(shù)據(jù)顯示。
5.2.3設(shè)計步驟
一、啟動WinCC并新建項目
啟動WinCC,單擊“開始”>SIMATIC>WinCC>WindowsControlCenter6.0。選擇“文件”>新建,此時會出現(xiàn)項目類型選擇對話框。選擇單用戶項目,輸入項目名稱,在這里輸入“sewerage”,并選擇項目的存儲位置。
二、安裝通訊驅(qū)動程序
添加一個通訊驅(qū)動程序,鼠標(biāo)右擊工程瀏覽器中瀏覽窗口中的“變量管理”,選擇“添加新的驅(qū)動程序”。在“添加新的驅(qū)動程序”對話框中選擇SIMATICS7ProtocolSuite.chn。單擊驅(qū)動程序前面的“+”,將會顯示當(dāng)前驅(qū)動程序所有可用的通道單元。右擊MPI通道單元,在快捷菜單中選擇新的“驅(qū)動程序的連接”菜單項。在隨后顯示的連接屬性對話框中輸入PLCstation作為邏輯連接名,單擊“確定”按鈕。
三、定義變量
單擊“變量管理”>SIMATICS7ProtocolSuite>MPI前面的“+”,展開各自節(jié)點,鼠標(biāo)右擊節(jié)點PLCstation,在快捷菜單中選擇“新建變量組”,輸入DI作為變量組名,同樣的建立DO、AI和AO變量組。建立變量組的目的是為了更好的管理這些變量。如果在一個項目中因處理大量的數(shù)據(jù)而需要很多的變量時,建議將變量組織為變量組。只有這樣才能在大型的項目中始終注意各種事件。一般可將完成同一功能的變量或?qū)儆谕辉O(shè)備的變量歸結(jié)為一個組。在新建的幾個變量組中添加多個“標(biāo)簽”,這些“標(biāo)簽”,這些標(biāo)簽對應(yīng)PLC中的地址,數(shù)據(jù)類型也要和PLC中的數(shù)據(jù)類型保持一致。這樣,當(dāng)我們運行項目時,PLC的數(shù)據(jù)就被采集到計算機(jī)中。這些數(shù)據(jù)用于在監(jiān)控畫面中顯示、歸檔、報表打印等。
四、創(chuàng)建過程畫面
1.設(shè)計主畫面
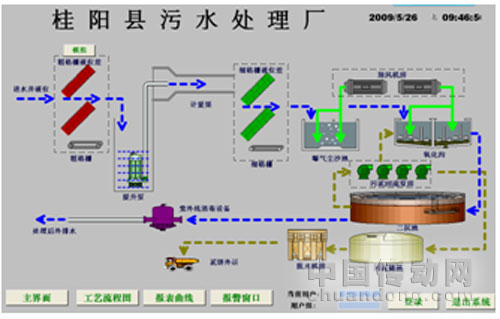
圖5.4上位機(jī)主畫面
主畫面顯示污水處理的整個工藝流程,包括顯示重要的模擬量輸入信號。在工藝流程主畫面的下方是一排按鈕,“主畫面”用于回到工藝流程主畫面;“工藝流程圖”用于進(jìn)入各個工藝流程分畫面;“報表曲線”用于進(jìn)入報表和趨勢曲線畫面;報警窗口用于顯示實時報警和歷史報警;“登陸”和“退出系統(tǒng)”用于用戶登陸和退出監(jiān)控系統(tǒng)。在監(jiān)控系統(tǒng)運行時按“Ctrl+L”,可以進(jìn)入登陸狀態(tài),用戶可以在登錄對話框中輸入用戶名和密碼進(jìn)行登陸。當(dāng)用戶點擊“退出系統(tǒng)”時會顯示退出登陸對話框,可以進(jìn)行確認(rèn)退出和取消退出,這樣可以防止用戶誤點擊退出系統(tǒng)。同時在畫面中始終顯示系統(tǒng)時間。
2.設(shè)計工藝流程分畫面

圖5.5格柵間畫面
在工藝流程分畫面的最上面有一排按鈕,用于在不同的工藝流程段分畫面之間切換包括。包括“格柵間”、“曝氣塵沙池”、“鼓風(fēng)機(jī)房”、“生化反應(yīng)池”、“二沉池”、“紫外線消毒”幾個按鈕。下面以格柵間為例看一下工藝流程分畫面的創(chuàng)建過程。選擇菜單“查看”>“庫”或單擊工具欄上的圖標(biāo),顯示對象庫中的對象中的目錄。雙擊“全局庫”后顯示全局庫中的目錄樹。單擊對象庫工具欄上的圖標(biāo),可以預(yù)覽對象庫中的圖形。選擇相應(yīng)的對象,并將其托至畫面區(qū)中。拖動對象周圍的黑色方塊,改變對象的大小。同時在“標(biāo)準(zhǔn)對象”中選擇靜態(tài)文本以及“智能對象”中的輸入輸出對象放置在畫面中。
3.趨勢曲線畫面
要在運行系統(tǒng)中顯示趨勢曲線和表格畫面,首先需要進(jìn)行過程值歸檔。過程值歸檔的目的是采集、處理和歸檔工業(yè)現(xiàn)場的過程數(shù)據(jù)。以這種方法獲得的過程數(shù)據(jù)可用于獲取與設(shè)備的操作狀態(tài)有關(guān)的管理和技術(shù)標(biāo)準(zhǔn)。在運行系統(tǒng)中,可以以表格或趨勢曲線的形式輸出當(dāng)前過程值或已歸檔的過程值,也可以將所歸檔的過程值作為記錄打印輸出。WinCC使用“變量記錄”組件來組態(tài)過程值歸檔,可以選擇組態(tài)過程值歸檔和壓縮歸檔,定義采集和歸檔周期,并選擇想要歸檔的過程值。在一個歸檔中可以定義要歸檔變量的不同采集類型。可以是非周期、連續(xù)周期、可選擇周期以及一旦改變。
WinCC的圖形系統(tǒng)提供兩個ActiveX控件用于顯示過程值歸檔。在WinCC的畫面中插入WinCCOnlineTrendControl控件,以及WinCCOnlineTableControl控件。在控件的選項卡中設(shè)置標(biāo)題、變量、字體等。
4.組態(tài)報警畫面
在WinCC中,報警記錄編輯器負(fù)責(zé)消息的采集和歸檔,包擴(kuò)過程、預(yù)加工、表達(dá)式以及歸檔等消息的采集功能。消息系統(tǒng)給操作員提供了關(guān)于操作狀態(tài)和過程故障狀態(tài)的信息。他們將臨界狀態(tài)提早通知操作員,并幫助消除空閑時間。系統(tǒng)可以通過畫面和聲音的形式報告記錄消息時間,還可以用電子和書面的形式歸檔。報警可以通知操作員在生產(chǎn)過程中發(fā)生的故障和錯誤消息,用于及早警告臨界狀態(tài)或縮短停機(jī)時間。
WinCCAlarmControl作為顯示消息時間的消息視圖使用。用戶在組態(tài)時就可獲得高度的靈活性,因為希望顯示的消息視圖、消息行和消息塊均可在圖形編輯器中進(jìn)行組態(tài)。在WinCC運行系統(tǒng)中,報警事件將以表格的形式在畫面中。在WinCC報警畫面中,添加WinCCAlarmControl控件,然后雙擊該控件,打開屬性對話框中的消息行選項卡,對在控件中顯示的項目進(jìn)行設(shè)置,能夠顯示報警日期、時間、消息文本和錯誤點。
第6章控制策略研究
6.1PID算法
6.1.1PID算法介紹
按偏差的比例、微分、積分進(jìn)行控制(簡稱PID控制)是連續(xù)系統(tǒng)控制中技術(shù)最成熟,應(yīng)用最廣泛的一種控制技術(shù)。它的結(jié)構(gòu)簡單,參數(shù)調(diào)整方便,是在長期的工程實踐中總結(jié)出來的一套控制方法。在工業(yè)控制中由于難以建立精確的數(shù)學(xué)模型,系統(tǒng)的參數(shù)經(jīng)常發(fā)生變化,所以人們往往采用PID控制技術(shù),根據(jù)經(jīng)驗進(jìn)行在線調(diào)整,從而得到滿意的控制效果。
6.1.2PID算法在PLC中的實現(xiàn)
考慮到PLC的運算速度,需要對PID算法進(jìn)行一下轉(zhuǎn)化,特別是積分項的計算。由PID的離散形式方程可知,積分項包括第一次采樣到當(dāng)前采樣時刻的所有誤差;微分項由本次和上次的采樣值決定;而比例項只由本次的采樣值決定。在PLC中要存儲所有的采樣的誤差時不實際的,也是不必要的。因為自第一個采樣時刻開始,每次采樣獲得一個誤差,要由PLC計算一次輸出,所以只需要將上一次的誤差和上一次的積分項存儲。利用數(shù)字計算機(jī)的迭代運算,可將PID算式化為遞推形式[3]。簡化形式如下:
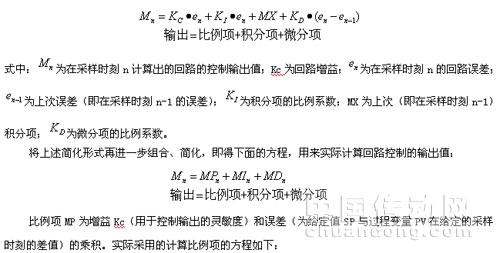

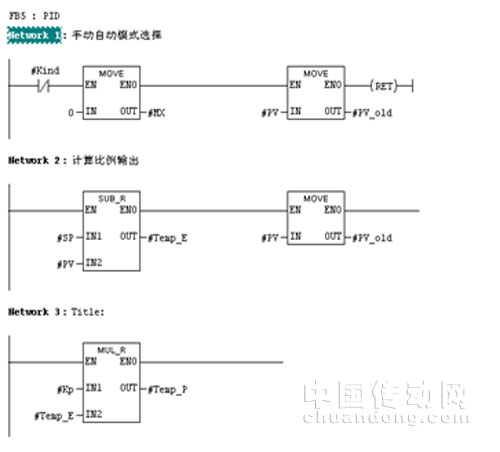
在該污水處理系統(tǒng)中,在提升泵、曝氣機(jī)、羅茨風(fēng)機(jī)、污泥回流泵等多處用到PID控制。所以在S7300PLC中將PID控制程序編制為一個程序塊(FB),為每個需要PID程序控制的設(shè)備建立一個背景數(shù)據(jù)塊(DI),這樣每次PID運算之后的MX將會被保存。PID運算的輸出通過模擬量輸出模塊(AO)輸出到變頻器的控制端,從而實現(xiàn)程序自動控制電動機(jī)轉(zhuǎn)速。下面是PID功能塊的程序:


6.2軟起動器一拖三控制
提升泵房有4臺提升泵,其中的三臺采用施耐德ATS4837KW軟起動器,工作在接觸器旁路工作模式,實現(xiàn)一拖三控制。在一拖三級聯(lián)控制系統(tǒng)中,ATS48的運行信號RUN,停止信號STOP和級聯(lián)信號LIC由PLC的繼電器輸出給定。同時,將ATS48的輸出繼電器R1設(shè)置為“r1I(隔離繼電器)”,把邏輯輸入LI3設(shè)置為“LIC(級聯(lián)控制)”。電機(jī)主回路控制圖如下圖所示。

圖6.1電機(jī)主回路控制圖
圖中1KM1、2KM1、3KM1為電機(jī)1#、2#、3#的主接觸器,1KM2、2KM2、3KM2為電機(jī)1#、2#、3#的旁路接觸器。下面以電機(jī)1為例說明電機(jī)的啟動停止過程。
啟動時,按下啟動按鈕,經(jīng)PLC延時后,輸出一個500ms(該時間應(yīng)大于100ms,小于1000ms)的脈沖啟動信號給ATS48的RUN端,軟啟動器被允許啟動,由于產(chǎn)生運行信號,ATS48內(nèi)部繼電器R1吸合,于是主接觸器1KM1合上,ATS48按照設(shè)置的啟動時間啟動;啟動結(jié)束后,ATS48內(nèi)部繼電器R2合上,于是旁路接觸器1KM2合上,此時1KM1和1KM2同時吸合;在較短的一段時間(由ATS48決定)之后,R2在R1之后失電,1KM1斷開,電機(jī)繼續(xù)由1KM2供電,完成整個啟動過程。同理可以啟動2#電機(jī)和3#電機(jī)。
停止時,按下停止按鈕,經(jīng)PLC延時后,輸出一個500ms(該時間應(yīng)大于200ms)的脈沖信號給ATS48的LI3端,軟啟動器級聯(lián)控制被激活,ATS48內(nèi)部繼電器R1、R2吸合(R2為脈沖信號,R1保持閉合直到電機(jī)完全停下來),于是主接觸器1KM1吸合,ATS48與正在運行的電機(jī)接上;LI3脈沖信號的下降沿經(jīng)PLC延時后,輸出一個500ms(該時間應(yīng)大于100ms)的負(fù)脈沖信號給ATS48的STOP端,ATS48的內(nèi)部繼電器R2斷開,于是旁路接觸器1KM2斷開,ATS48軟啟動器按已設(shè)置的停車時間使電機(jī)停車,停車完成后,ATS48內(nèi)部繼電器R1斷開,于是主接觸器1KM1斷開,完成整個停車過程。同理可以停止2#電機(jī)和3#電機(jī)。
在PLC內(nèi)部,我們設(shè)置一個字節(jié)的變量作為啟動狀態(tài)的標(biāo)志,分別標(biāo)識軟起準(zhǔn)備好、軟起中、軟起完成、完成延時斷開、停止等。同時,對啟動器運行的時間進(jìn)行計時。如果軟起開始運行后經(jīng)過設(shè)定的時間PLC還沒有收到軟起完成的信號,則認(rèn)為是軟起動器故障。
7結(jié)束語
污水處理自動化監(jiān)控系統(tǒng)涉及到水處理、自動控制、計算機(jī)技術(shù)、儀器儀表、電力電子等眾多學(xué)科,是一個復(fù)雜的綜合性領(lǐng)域。本文以污水處理的工藝流程為線索,介紹了監(jiān)控系統(tǒng)的整體設(shè)計方案。講述了利用STEP7軟件編程、利用WinCC軟件完成組態(tài)的具體過程。同時,對在污水處理中的控制策略進(jìn)行了介紹,包括PID算法在PLC中的實現(xiàn)以及一臺軟啟動器拖動三臺電動機(jī)的具體實現(xiàn)。
