
0 引言
目前國內(nèi)生產(chǎn)的直流電機調(diào)速控制器大多都不帶通信接口,即使有帶通信接口也僅為RS232或RS485串行總線。眾所周知RS232和RS485有各自的優(yōu)缺點,阻礙了多臺電動機機組的進一步網(wǎng)絡(luò)化發(fā)展和群控控制。本文分析和研究了多臺直流電機CAN總線的通信協(xié)議以及軟件數(shù)據(jù)的傳輸,對工業(yè)網(wǎng)絡(luò)控制的實現(xiàn)具有一定的指導(dǎo)意義。CAN總線控制網(wǎng)絡(luò)工作于多主方式,網(wǎng)絡(luò)中的各節(jié)點都可根據(jù)總線訪問優(yōu)先權(quán)(取決于報文標識符)采用無損結(jié)構(gòu)的逐位仲裁的方式競爭向總線發(fā)送數(shù)據(jù),且CAN協(xié)議廢除了站地址編碼,采用對通信數(shù)據(jù)進行編碼,這可使不同的節(jié)點同時接收到相同的數(shù)據(jù),這些特點使得CAN總線構(gòu)成的網(wǎng)絡(luò)各節(jié)點之間的數(shù)據(jù)通信適時性強,并且容易構(gòu)成冗余結(jié)構(gòu),提高系統(tǒng)的可靠性和靈活性。
1 系統(tǒng)總體設(shè)計
多臺直流電動機CAN總線控制系統(tǒng)如圖1所示,本系統(tǒng)由直流電機、直流電機調(diào)速控制器、CAN總線通信控制板、上位機和CAN總線五部分構(gòu)成。CAN總線能完成網(wǎng)絡(luò)的建立、網(wǎng)絡(luò)信號的傳遞、總線控制以及與上位機之間的數(shù)據(jù)通信;同時還完成對直流電機電壓、電流數(shù)據(jù)的測試、傳輸以及直流電機轉(zhuǎn)矩、轉(zhuǎn)速的檢測并進行閉環(huán)控制等。
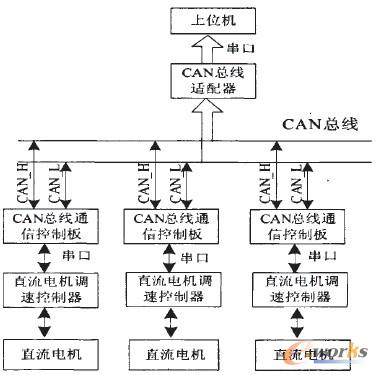
圖1 多臺電機CAN總線控制框圖
2 數(shù)據(jù)通信設(shè)計
在直流電機調(diào)速系統(tǒng)結(jié)構(gòu)中有一個通信接口模塊,用來實現(xiàn)與CAN總線通信控制板之間的數(shù)據(jù)交換,首先用DSP實現(xiàn)AD采樣電路對速度反饋、速度給定、電流反饋等數(shù)據(jù)處理。采樣所得數(shù)據(jù)經(jīng)再發(fā)送給ARM處理器,最終ARM處理器實現(xiàn)CAN總線通信。
2.1 直流電機的CAN總線通信設(shè)計
CAN協(xié)議標準中規(guī)定了CAN總線支持的兩種傳輸介質(zhì):雙絞線和光纖。目前,絕大多數(shù)CAN總線系統(tǒng)采用的都是雙絞線傳輸。光纖一般應(yīng)用于大容量、高速率的傳輸中,對于CAN總線這種傳輸速率較低、數(shù)據(jù)量較小的現(xiàn)場總線通信,光纖傳輸?shù)膬?yōu)勢得不到完全發(fā)揮。所以,本文使用雙絞線作為通信介質(zhì)。
每個直流電機都是網(wǎng)絡(luò)中的一個節(jié)點,其在運行時的數(shù)據(jù)經(jīng)DSP采集后發(fā)送到CAN總線通信控制板,然后傳輸?shù)紺AN總線上,再由CAN總線適配器傳給上位機,實現(xiàn)對電機的實時監(jiān)測。這樣就可以實現(xiàn)上位機對電機的實時監(jiān)控。其中CAN總線適配器實現(xiàn)上位機與CAN總線的數(shù)據(jù)交換。
CAN總線適配器由CAN的微控制器完成與上位機通信的協(xié)調(diào)工作,根據(jù)需要可對CAN適配器微控處理器中的寄存器進行讀寫操作,實現(xiàn)初始化及數(shù)據(jù)采集。CAN總線適配器上電復(fù)位和初始化后,等待著命令和數(shù)據(jù),當命令或數(shù)據(jù)送給CAN的寄存器并置位標志位,即完成一次通訊,然后取出數(shù)據(jù)做進一步處理。與CAN適配器間的通訊有查詢和中斷兩種方式。
2.2 CAN總線網(wǎng)絡(luò)通訊調(diào)試
首先要測試CAN總線適配器與上位機能否實現(xiàn)通信,從前面的介紹可以知道它們是通過串口實現(xiàn)通訊的。打開串口調(diào)試工具,由適配器向串口發(fā)送數(shù)據(jù),如果串口調(diào)試工具可以接收到數(shù)據(jù),則說明它們之間的通訊正常。接著要對兩個CAN節(jié)點的調(diào)試,我們采用雙絞線作為通訊介質(zhì)。總線傳輸速度與雙絞線的長度成反比關(guān)系,所以可以根據(jù)對通訊速度的要求確定雙絞線的長度,由于是簡單通訊實驗,因而對雙絞線的長度沒有要求。設(shè)置一個節(jié)點為發(fā)送端,另一節(jié)點為接收端,取消報文濾波器,如果能夠完成發(fā)送接收任務(wù)則它們已經(jīng)能夠?qū)崿F(xiàn)簡單的通訊。
本設(shè)計設(shè)定傳輸運行狀態(tài)與故障狀態(tài)兩種運行參數(shù),其中運行狀態(tài)包括直流電機的:給定速度、反饋速度、反饋電路、電樞電壓。運行狀態(tài)是由DSP自帶的AD轉(zhuǎn)換模塊經(jīng)采樣所得。DSP的AD采樣器精度是12位的,所以經(jīng)模數(shù)轉(zhuǎn)換后的數(shù)值是一個12位的二進制數(shù),對其前端補零轉(zhuǎn)換成16位數(shù)據(jù)經(jīng)串口直接發(fā)送給ARM處理器。因為兩者的傳輸距離很近,所以不需要經(jīng)過電平轉(zhuǎn)換就可直接發(fā)送。而電機的故障狀態(tài)則由0、1表示,0代表沒有故障,1代表電機出現(xiàn)故障。
針對CAN總線技術(shù)在數(shù)據(jù)傳輸中采用短幀結(jié)構(gòu)和過濾機制,本文設(shè)計了直流電機調(diào)速控制板與CAN總線控制板的數(shù)據(jù)通信,以及CAN總線與上位機的通信等。
要實現(xiàn)DSP與ARM以及CAN總線的通信,需要設(shè)置一個通信控制協(xié)議,協(xié)議設(shè)定每個要傳輸?shù)膮?shù)一個控制地址。CAN總線每次可以發(fā)送8個字節(jié)數(shù)據(jù),每個字節(jié)8位,所以給定速度、反饋速度、反饋電流及電樞電壓這四組運行參數(shù)需要占據(jù)兩個字節(jié),而故障狀態(tài)只需占據(jù)一個字節(jié)。CAN總線數(shù)據(jù)幀的第一個字節(jié)存放控制地址,第二、三個字節(jié)存放數(shù)據(jù)。其中,第二字節(jié)存高地址,第三字節(jié)存低地址。如果發(fā)送的是故障狀態(tài)則只有第二個字節(jié)是傳輸數(shù)據(jù)。CAN總線每次只發(fā)送一種運行參數(shù),其中給定速度、反饋速度、反饋電路及電樞電壓依次輪流發(fā)送。而故障狀態(tài)在程序中設(shè)置為優(yōu)先級最高,當有故障出現(xiàn)時則優(yōu)先發(fā)送,正常狀態(tài)下不發(fā)送。圖2是整個系統(tǒng)的數(shù)據(jù)傳輸流程圖。
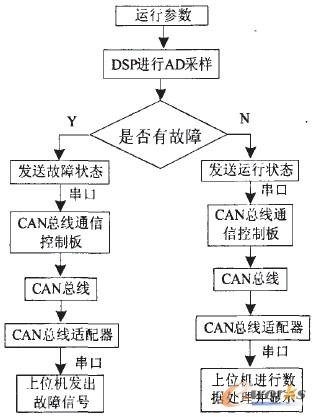
圖2 數(shù)據(jù)傳輸流程圖
3 實驗
圖3為上位機數(shù)據(jù)顯示界面,圖中顯示為調(diào)試某一時刻的傳輸數(shù)據(jù)。可以看出反饋速度與給定速度并不相等,由于PI控制算法的作用使反饋速度始終處于給定速度附近。反饋電流1.2A是在電機空載時的測量值,隨著負載的增加,反饋電流會逐漸增大。電樞電壓是直流電機母線上的電壓,由于電機在實際應(yīng)用中主要工作在220V,所以調(diào)試時首先將電樞電壓穩(wěn)定在這一電壓值,然后再對速度進行調(diào)節(jié)。在正常情況下,故障狀態(tài)始終顯示為“無”,當有故障信號發(fā)出時,故障狀態(tài)顯示為“有”并發(fā)出報警信號。
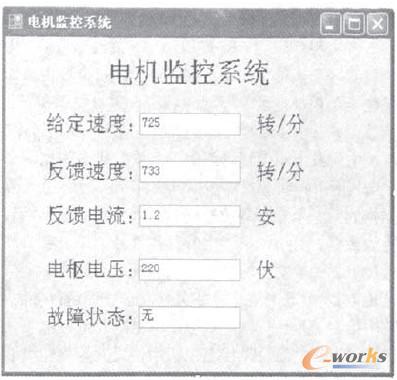
圖3 上位機數(shù)據(jù)顯示界面
這樣上位機就收到某臺電機此時的各種運行參數(shù),由此可以實現(xiàn)使用上位機監(jiān)控整個廠房中所有電機的運行狀況。
在系統(tǒng)調(diào)試時,使用三米長的雙絞線作為通信介質(zhì),上位機、直流電機、直流電機調(diào)速器等作為調(diào)試工具。實驗證明,上位機能夠順利接受到直流電機發(fā)送的各種運行參數(shù),說明系統(tǒng)已經(jīng)實現(xiàn)了數(shù)據(jù)通信的要求。由于直流電機。測速機本身都是比較大的干擾源,在此情況下數(shù)據(jù)仍能順利傳輸,這也一定程度上驗證了CAN總線的抗干擾能力。
4 結(jié)束語
本文針對CAN總線在直流電機調(diào)速器與CAN總線控制器之間的數(shù)據(jù)交換以及CAN總線與上位機間的數(shù)據(jù)傳輸,最終實現(xiàn)CAN總線對直流電機的運行狀態(tài)的監(jiān)視。