
基于ARM9的快速對(duì)星裝置設(shè)計(jì)與實(shí)現(xiàn)
摘要: 該裝置通過GPS采集地理信息、電子羅盤采集姿態(tài)信息,根據(jù)GPS采集的地理信息,結(jié)合通信衛(wèi)星位置,計(jì)算出對(duì)星所需要的標(biāo)準(zhǔn)方位、俯仰、極化參數(shù),同時(shí)計(jì)算出當(dāng)?shù)亍?dāng)年磁偏角數(shù)據(jù);通過采集電子羅盤數(shù)據(jù),得到初步方位、俯仰、極化數(shù)據(jù),其中俯仰和極化均為天線實(shí)際指向值,但是方位值是以磁北為標(biāo)準(zhǔn)測(cè)量值;通過GPS得到的磁偏角數(shù)據(jù),對(duì)從電子羅盤得到的以磁北為標(biāo)準(zhǔn)的方位值進(jìn)行修正,得到比較準(zhǔn)確的、以真北為標(biāo)準(zhǔn)的真實(shí)方位數(shù)據(jù)。
Abstract:
Key words :
大中型衛(wèi)星站均具有相應(yīng)的、完善的天線跟蹤伺服系統(tǒng),天線伺服跟蹤系統(tǒng)依據(jù)信標(biāo)信號(hào)強(qiáng)弱,決定天線轉(zhuǎn)向,驅(qū)動(dòng)天線旋轉(zhuǎn),達(dá)到準(zhǔn)確對(duì)星。隨著通信技術(shù)和電子技術(shù)的發(fā)展,小型衛(wèi)星站如車載站、便攜站受機(jī)動(dòng)性能和便攜性能的局限,不可能采用大中型衛(wèi)星站才能使用的伺服跟蹤系統(tǒng),采用不同原理,開發(fā)適用于小型衛(wèi)星站天線的對(duì)星裝置,具有現(xiàn)實(shí)意義。
1 系統(tǒng)概述
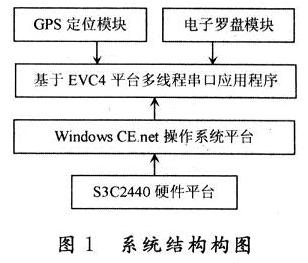
該裝置通過GPS采集地理信息、電子羅盤采集姿態(tài)信息,根據(jù)GPS采集的地理信息,結(jié)合通信衛(wèi)星位置,計(jì)算出對(duì)星所需要的標(biāo)準(zhǔn)方位、俯仰、極化參數(shù),同時(shí)計(jì)算出當(dāng)?shù)亍?dāng)年磁偏角數(shù)據(jù);通過采集電子羅盤數(shù)據(jù),得到初步方位、俯仰、極化數(shù)據(jù),其中俯仰和極化均為天線實(shí)際指向值,但是方位值是以磁北為標(biāo)準(zhǔn)測(cè)量值;通過GPS得到的磁偏角數(shù)據(jù),對(duì)從電子羅盤得到的以磁北為標(biāo)準(zhǔn)的方位值進(jìn)行修正,得到比較準(zhǔn)確的、以真北為標(biāo)準(zhǔn)的真實(shí)方位數(shù)據(jù)。其系統(tǒng)結(jié)構(gòu)如圖1所示,其中基于EVC4平臺(tái)的多線程應(yīng)用程序流程結(jié)構(gòu)如圖2所示。

2 硬件設(shè)計(jì)
本裝置在設(shè)計(jì)上,選擇S3C2440作為主控制器構(gòu)成硬件平臺(tái),利用其豐富的外部接口和高速處理能力,達(dá)到實(shí)時(shí)采集數(shù)據(jù)、及時(shí)處理數(shù)據(jù)、快速傳輸數(shù)據(jù)、不附加額外接口設(shè)備的目的。由于該裝置需要測(cè)量的參數(shù)多,GPS、電子羅盤統(tǒng)一采用RS 232接口,保證了測(cè)量數(shù)據(jù)精度和接口一致性。供電統(tǒng)一采用+5 V鋰電池電源供電。
3 軟件設(shè)計(jì)
本裝置采用ARM9作為主控制器,以Windows CE.net操作系統(tǒng)作為系統(tǒng)平臺(tái),使用EVC4開發(fā)環(huán)境作為開發(fā)工具,軟件采用多線程結(jié)構(gòu),MFC和API編程技術(shù),實(shí)時(shí)采集傳感器數(shù)據(jù),計(jì)算修正方位值,達(dá)到準(zhǔn)確對(duì)星的目的。
3.1 總體程序設(shè)計(jì)
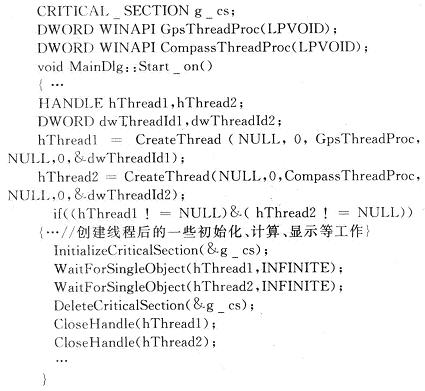
本裝置程序采用多線程結(jié)構(gòu),在主線程(用戶接口線程)的基礎(chǔ)上,增加兩個(gè)輔助線程(工作者線程),輔助線程負(fù)責(zé)處理數(shù)據(jù)采集,主線程負(fù)責(zé)界面響應(yīng)、數(shù)據(jù)融合、數(shù)據(jù)顯示。線程處理采用API,而不采用MFC編程,增加了程序的通用性。程序中還使用Suspend-Thread掛起線程、ResumeThread恢復(fù)線程、Exit-Thread退出線程。
線程同步采用臨界區(qū)域(也稱關(guān)鍵區(qū)域,即CRITI-CAL SECTION)措施,首先用CRITICAL_SEC-TION申明一個(gè)全局變量,再調(diào)用InitializeCriticalSec-tion初始化,使用EnterCriticalSection進(jìn)入關(guān)鍵區(qū)域,使用LeaveCriticalSection離開關(guān)鍵區(qū)域,使用Delete-CriticalSection函數(shù)刪除關(guān)鍵區(qū)域。其關(guān)鍵部分代碼如下:
3.2 HMR3000程序設(shè)計(jì)
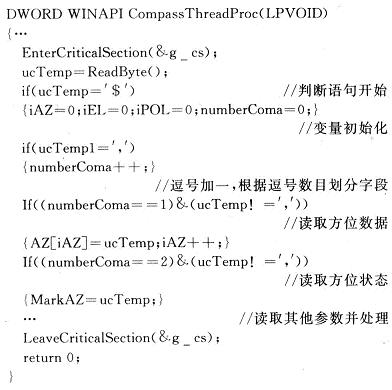
電子羅盤數(shù)據(jù)輸出格式滿足NMEA0183通信協(xié)議規(guī)范,根據(jù)需求選用$PTNTHPR語(yǔ)句,每秒更新30次,基本滿足實(shí)時(shí)測(cè)量的要求。$PTNTHPR語(yǔ)句的數(shù)據(jù)格式為:
$PTNTHPR,<1>,<2>,<3>,<4>,<5>,<6>*hh
各字段含義為:<1>表示方位值,<2>表示方位狀態(tài),<3>表示俯仰值,<4>表示俯仰狀態(tài),<5>表示橫滾值,<6>表示橫滾狀態(tài),hh表示校驗(yàn)和。采集數(shù)據(jù)程序在判斷各參數(shù)狀態(tài)正常的基礎(chǔ)上,從輸出語(yǔ)句中提取對(duì)應(yīng)參數(shù)值。其線程函數(shù)部分代碼如下:
3.3 GPS模塊程序設(shè)計(jì)
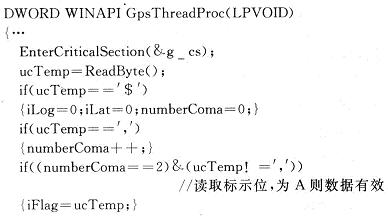
GPS模塊數(shù)據(jù)輸出格式也滿足NMEA0183通信協(xié)議規(guī)范,根據(jù)需求選用$GPRMC語(yǔ)句,默認(rèn)更新速率。$GPRMC語(yǔ)句的數(shù)據(jù)格式為:
$GPRMC,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,<10>,<11>,*hh。
各字段含義為:<1>表示方位值,<2>表示方位狀態(tài),<3>表示俯仰值,<4>表示俯仰狀態(tài),<5>表示橫滾值,<6>表示橫滾狀態(tài)。采集數(shù)據(jù)程序在判斷各參數(shù)狀態(tài)正常的基礎(chǔ)上,從輸出語(yǔ)句中提取對(duì)應(yīng)參數(shù)值。其線程函數(shù)部分代碼如下:
3.4 對(duì)星參數(shù)理論值計(jì)算
衛(wèi)星通信中重要的一步就是衛(wèi)星通信天線準(zhǔn)確對(duì)準(zhǔn)通信衛(wèi)星。對(duì)星需要三個(gè)參數(shù):方位、俯仰、極化。下面分別是三個(gè)參數(shù)的計(jì)算公式,其中ψc是衛(wèi)星波束中心經(jīng)度,ψs為衛(wèi)星的經(jīng)度,ψg是接收地經(jīng)度,θ為接收地緯度。
衛(wèi)星通信天線方位角計(jì)算公式:
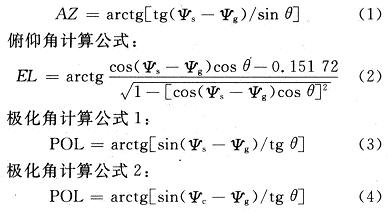
極化角通常位于式(3)和式(4)的計(jì)算值之間,為簡(jiǎn)化計(jì)算常采用式(3)作為極化角計(jì)算公式使用。經(jīng)過GPS采集得到接收地經(jīng)度、緯度,結(jié)合衛(wèi)星經(jīng)度,采用C語(yǔ)言提供的數(shù)學(xué)函數(shù)可以很簡(jiǎn)便地計(jì)算出天線準(zhǔn)確對(duì)星需要的三個(gè)參數(shù):方位、俯仰、極化。為對(duì)星操作提供理論標(biāo)準(zhǔn)值,將對(duì)星操作簡(jiǎn)化為比對(duì)理論標(biāo)準(zhǔn)值,調(diào)整天線,使實(shí)際值與理論值完全一致,從而完成對(duì)星任務(wù)。
3.5 方位角修正程序設(shè)計(jì)
電子羅盤測(cè)量得到的是天線實(shí)際指向值,由于電子羅盤是根據(jù)地磁場(chǎng)測(cè)量出方位值,此方位值實(shí)際是以磁北為標(biāo)準(zhǔn)的方位值,而理論值是以真北為標(biāo)準(zhǔn)的方位值,這樣在電子羅盤測(cè)量值和理論計(jì)算值之間存在一個(gè)差值,此差值即為磁偏角。要使電子羅盤測(cè)量的方位值代表以真北為標(biāo)準(zhǔn)的方位值,必須在電子羅盤測(cè)量的數(shù)據(jù)基礎(chǔ)上進(jìn)行磁偏角的修正。
根據(jù)IGRF2005地磁場(chǎng)模型,利用NOAA的NG-DC提供的磁偏角計(jì)算程序,逐一計(jì)算覆蓋我國(guó)領(lǐng)土及周邊的磁偏角數(shù)據(jù),其緯度為北緯10°~50°,經(jīng)度為東經(jīng)70°~140°,構(gòu)成41×71的二維數(shù)組,根據(jù)經(jīng)度、緯度數(shù)據(jù)提取磁偏角數(shù)據(jù),與采集的羅盤數(shù)據(jù)進(jìn)行運(yùn)算,修正羅盤方位值,從而得到代表物體指向的比較準(zhǔn)確的方位值。其部分代碼如下所示:
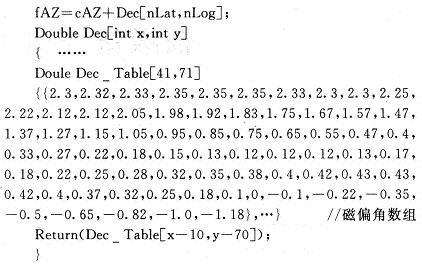
從電子羅盤得到的方位數(shù)據(jù),經(jīng)過磁偏角修正,形成以真北為標(biāo)準(zhǔn)的真實(shí)方位數(shù)據(jù),從而具有與理論對(duì)星參數(shù)比對(duì)的基礎(chǔ)。
4 應(yīng)用及結(jié)果
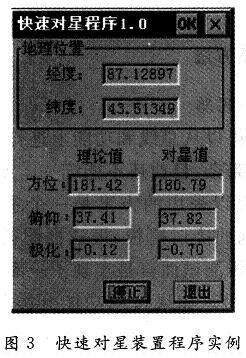
該裝置巧妙利用GPS模塊和電子羅盤模塊,在分別采集模塊數(shù)據(jù)的基礎(chǔ)上,利用地理信息進(jìn)行查表運(yùn)算,得出當(dāng)?shù)卮牌牵么牌切拚轿唬玫捷^為準(zhǔn)確的方位指向數(shù)據(jù)。此裝置采用S3C2440ARM9芯片作為主CPU,Windows CE.Net為操作系統(tǒng)平臺(tái);電子羅盤選用Honeywell HMR3000,GPS選用GARMINGPS25LVS,蘑菇頭天線,單一+5 V供電,輸出接口均為RS 232。該系統(tǒng)精度高、實(shí)時(shí)性好、界面直觀,具有廣泛的應(yīng)用前景。某型衛(wèi)星通信裝備,天線口徑1 m,工作于Ku波段,其半功率波瓣寬度近似計(jì)算公式為:θ=70λ/D,得到半功率波瓣寬度θ=1.75°;通過磁偏角修正后的電子羅盤角度指示誤差為ψ=±0.5°,θ≥ψ,滿足應(yīng)用需求。2009年烏魯木齊的磁偏角為-2.93°,如果不加磁偏角修正,其誤差總和為2.93°+0.5°=3.43°,超過半功率波束寬度,無(wú)法完成對(duì)星任務(wù)。程序運(yùn)行后界面如圖3所示。
5 結(jié) 語(yǔ)
經(jīng)過使甩證明:該裝置經(jīng)過磁偏角修正后,可以使用于方位精度要求±0.5°、傾角和橫滾經(jīng)度要求土0.1°的物體位置和姿態(tài)測(cè)量。經(jīng)過在昆明、喀什、北京等地實(shí)際使用測(cè)量,效果良好,平均對(duì)星時(shí)間由原來不確定減少到2 min以內(nèi)(實(shí)際測(cè)量平均時(shí)間為1.4 min),改善效果明顯。使用中注意事項(xiàng):由于此裝置采用的電子羅盤,利用地磁場(chǎng)根據(jù)磁阻傳感信息計(jì)算方位的原理,因此,此裝置在使用中要求盡量遠(yuǎn)離框架式建筑物、鐵礦廠、鐵柵欄、鐵門鐵窗等大型硬鐵物質(zhì),避免因硬鐵物質(zhì)對(duì)磁力線的影響,導(dǎo)致測(cè)量誤差大的情況出現(xiàn)。
此內(nèi)容為AET網(wǎng)站原創(chuàng),未經(jīng)授權(quán)禁止轉(zhuǎn)載。