
在消費電子產(chǎn)品中,接近感應(yīng)作為一種探測用戶身體或手部存在的方法,越來越為人們所接受。該技術(shù)也能夠用于動作感應(yīng),如檢測用戶手勢。用戶手勢作為一種輸入,可以應(yīng)用于許多設(shè)備,如手機(jī)、計算機(jī)和其他家用電子產(chǎn)品。
要理解動作感應(yīng)系統(tǒng)設(shè)計的理論基礎(chǔ),需要了解紅外線(IR)與可見光的差異,探討接近和動作感應(yīng)系統(tǒng)如何在單一LED 下運行,以及動作感應(yīng)在使用多個LED 進(jìn)行多接近測量時如何工作。
當(dāng)我們談及“光”時,通常指的是來自太陽或燈具的可見光,然而,可見光僅占光譜范圍中的一小部分。我們把可見光定義為人眼可以識別的所有光線,通常人眼可以識別的光線波長為380-750nm。那么,人眼無法識別的非可見光(如波長為850 nm 光)又如何呢?
IR 輻射光的波長為750nm-1000μm,IR 光與可見光有著相同的特性,例如反射率,而且它可以通過特殊燈泡或發(fā)光二極管生成。因為人眼無法看到IR 光,所以我們可以用它來完成一些特殊的人機(jī)界面任務(wù),例如接近檢測,而無需用戶與系統(tǒng)進(jìn)行任何直接接觸。
IR 接近傳感系統(tǒng)能夠檢測附近物體的存在,并根據(jù)檢測結(jié)果做出反應(yīng)。IR 接近檢測的應(yīng)用無處不在。 例如,手機(jī)可以使用接近傳感技術(shù)檢測通話時手機(jī)是否接近面部。當(dāng)你把手機(jī)靠近耳邊時,手機(jī)將檢測 到頭的存在,從而自動關(guān)閉屏幕以節(jié)省電能。其他接近感應(yīng)系統(tǒng)的例子包括皂液器和飲水機(jī),你可以把 手放在傳感器附近(通常在皂液管或水龍頭附近),以“非接觸”而又衛(wèi)生的方式獲取皂液或水。
在高端 汽車上,外部防碰撞系統(tǒng)也使用接近檢測,當(dāng)汽車與其他汽車或者物體太靠近時,接近檢測會提醒司機(jī) 注意。有些車輛還可以使用車內(nèi)接近感應(yīng)系統(tǒng)檢測乘客的存在,從而調(diào)整安全裝置(如安全氣囊)。 接近檢測通過專門設(shè)計的IR LED 實現(xiàn)。與IR LED 相對應(yīng)的是光電二極管,它一般用來檢測LED 發(fā)出 的IR 光。當(dāng)IR LED 和光電二極管同方向放置時,光電二極管將不會檢測到任何IR 光,除非有物體在 LED 的前面,將光反射回光電二極管。反射回光電二極管的光強(qiáng)與物體到光電二極管的距離逆向相 關(guān)。
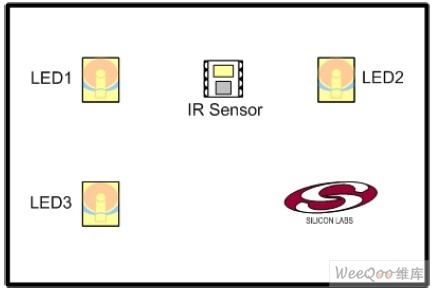
圖 1:一維空間動作檢測
單一 LED 和光電二極管相結(jié)合可以檢測一些動作,例如可以檢測物體是否靠近或遠(yuǎn)離光電二極管,這 僅僅是一維空間檢測。假設(shè)一個系統(tǒng),其布局如圖1 所示,單一LED 系統(tǒng)僅使用LED1 與IR 傳感器。 圖2 是三個手勢動作過程中Silicon Labs Si1120 傳感器感應(yīng)IR LED 后的輸出值,其中Y 軸是反射的 IR 光強(qiáng),X 軸是時間。三個手勢包括沿圖1 X 軸從左到右的滑動,沿Y 軸從底部到頂部的滑動,以及 沿Z 軸由遠(yuǎn)及近,然后由近及遠(yuǎn)的往復(fù)動作。圖2 表明,單一LED 系統(tǒng)不能區(qū)分這些手勢,使用單一 LED,系統(tǒng)只能檢測到物體正在接近或遠(yuǎn)離傳感器,而不能判別其方向。
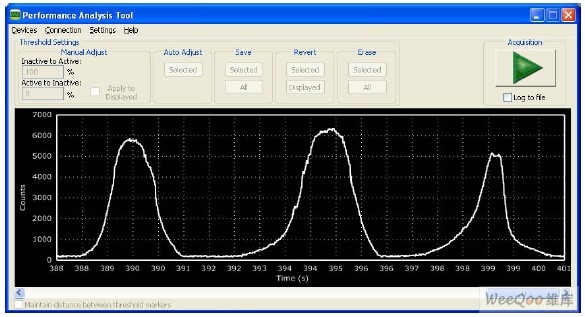
圖 2:單一LED 系統(tǒng)性能分析
二維空間檢測由位于不同位置的兩個LED 和單個光電二極管組成。從LED1 得到一個測量值,然后快 速從LED2 獲得另一個測量值,兩個測量值被用于計算二維空間上的物體位置。其中一維空間是接近 LED1(左)或接近LED2(右),而另一維空間是接近或遠(yuǎn)離光電二極管。圖3 是與圖2 相同的三個 手勢,其中白線代表從LED1 中讀出的數(shù)據(jù),紅線代表從LED2 讀出的數(shù)據(jù)。從左到右滑動過程中,白 線上升,然后是紅線。當(dāng)手從左到右滑動時,LED1 反射IR 光到傳感器,然后是LED2。
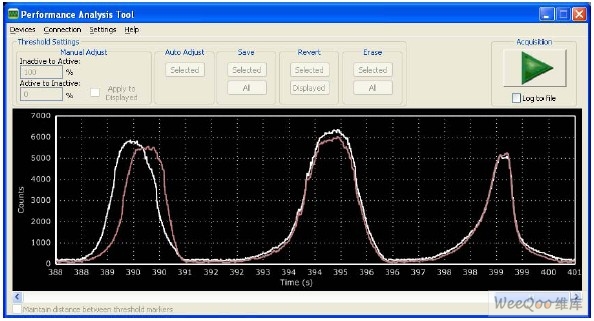
圖 3:二維空間中手勢性能分析
三維空間動作檢測由三個LED 和單個光電二極管組成。LED3 與LED1、LED2 不在同一直線上,如圖 1 所示,可以把LED1 和LED2 之間的連線看作X 軸,LED1 和LED3 之間的連線看作Y 軸,從光電二 極管和LED 到被測物體之間的連線看作Z 軸。圖4 顯示了與圖2 和圖3 相同的測量過程,其中藍(lán)線代 表LED3 的測量數(shù)據(jù)。當(dāng)手從左向右滑動時,因為手在LED1 和LED3 上同時通過,LED1 和LED3 數(shù) 據(jù)線同時上升,然后是LED2 數(shù)據(jù)線。當(dāng)手從底部向頂部滑動時,因為手先遇到來自LED3 的IR 光, LED3 數(shù)據(jù)線上升,然后是LED1 和LED2。當(dāng)往復(fù)動作時,因為手在整個過程中都反射等量的LED 光,三個LED 測量值是相同的。
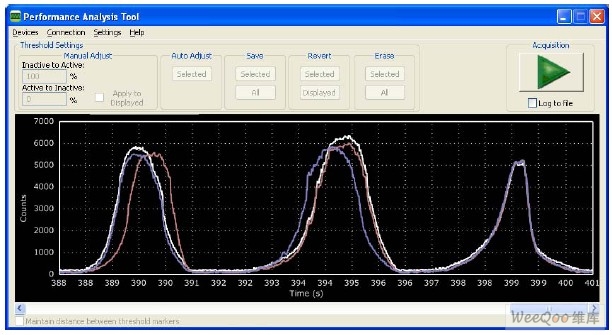
圖 4:加入LED3 后,三維空間中動作性能分析
當(dāng) IR LED 和IR 傳感器應(yīng)用于產(chǎn)品時,這些組件通常不會用作裝飾目的而放在外面,終端產(chǎn)品至少需 要一個開口或透明窗口,讓IR 光透過。
IR LED 從窗口中照射出,被外部物體反射后,通過窗口進(jìn)入Si1120 傳感器。單一窗口配置的主要缺點 是:窗口將導(dǎo)致一些光線被內(nèi)反射到Si1120,即使在檢測范圍內(nèi)沒有外部物體時,大量反射光也可能 導(dǎo)致傳感器輸出。
雙窗口設(shè)計使用其中一個窗口用于IR LED,另一個窗口用于傳感器。通過在LED 和傳感器之間進(jìn)行適 當(dāng)?shù)母綦x,設(shè)計消除了內(nèi)部反射的問題,為系統(tǒng)提供更好的敏感性和檢測范圍。
對于 IR 接近感應(yīng)系統(tǒng)設(shè)計而言,選擇何種IR LED 是一項非常重要的決定。IR LED 視角對最大檢測距 離和范圍有很大影響。從LED 射出的IR 光形成一個圓錐狀,圓錐頂角(大多數(shù)LED 能量從這里輸 出)被稱為LED 視角。

圖 5:窄視角和寬視角IR LED 的差異
所有的 LED 都有一個特定的視角,一個窄視角LED 意味著發(fā)出的能量更加集中,比寬視角LED 照射 的更遠(yuǎn)。這意味著使用窄視角IR LED 將在窄檢測區(qū)域中形成更遠(yuǎn)的檢測范圍,圖5 說明了窄視角和寬 視角IR LED 的差異。
當(dāng)設(shè)計 IR 系統(tǒng)時,系統(tǒng)中被測物體的特點也是需要重點考慮的。除了用于檢測手勢,IR 接近感應(yīng)系統(tǒng) 也能被用于檢測無生命物體,如車庫門(打開或關(guān)閉)。檢測較大物體時,由于有更多的IR 光被反 射,檢測距離將更遠(yuǎn)。物體的顏色是另一個需要考慮的因素,因為IR 光與可見光有相同特性,淺色物 體比深色物體反射更多光線。物體的顏色越深,越要接近IR 系統(tǒng),因為僅有來自IR LED 的少量IR 光 被反射到IR 傳感器。
在消費電子、工業(yè)和汽車領(lǐng)域應(yīng)用中,許多電子系統(tǒng)從非接觸式反射中受益。IR 接近感應(yīng)為需要檢測 物體存在的系統(tǒng)提供了一個最佳方法。接近感應(yīng)也可用于檢測最多三維空間內(nèi)的動作,甚至是手勢,使 得下一代電子產(chǎn)品的人機(jī)界面更先進(jìn)、更直觀。