
老式雷達(dá)" title="雷達(dá)">雷達(dá)對目標(biāo)方位的測量,一般是通過安裝在雷達(dá)滅線軸上的機(jī)電傳感器(如旋轉(zhuǎn)變壓器和同步機(jī))來實(shí)現(xiàn)的。通過這樣的傳感器將天線當(dāng)前的方位角度值傳送到雷達(dá)的平面位置顯示器,由偏轉(zhuǎn)線圈與天線的隨動系統(tǒng)在平面位置顯示器上顯示出方位掃描線,給雷達(dá)操作員指示目標(biāo)的方位角。隨著現(xiàn)代計(jì)算機(jī)與數(shù)字技術(shù)的發(fā)展.這種顯示方式已不適合時(shí)代發(fā)展的要求。為了實(shí)現(xiàn)對雷達(dá)探測目標(biāo)的錄取、綜合、相關(guān)及顯示,為了實(shí)現(xiàn)設(shè)備的小型化,需要將天線的方位角變換為數(shù)字信號,而ADI公司生產(chǎn)的單片旋轉(zhuǎn)角數(shù)字變換" title="數(shù)字變換">數(shù)字變換器AD2S82A" title="AD2S82A">AD2S82A正是一種可將旋轉(zhuǎn)變壓器格式的信號轉(zhuǎn)換為角度數(shù)字信號的專用芯片。配合一些外圍電路及單片機(jī),可靈活方便地實(shí)現(xiàn)對天線方位角的數(shù)字變換。
1 AD2S82A的結(jié)構(gòu)及特點(diǎn)
AD2S82A是由美國ADI公司專為旋轉(zhuǎn)變壓器格式的旋轉(zhuǎn)角信號而生產(chǎn)的一種旋轉(zhuǎn)角/數(shù)字信號變換器,其封裝形式為44腳PLCC,旋轉(zhuǎn)角的數(shù)字輸出分辨率為10、12、14、16位可選,除了旋轉(zhuǎn)角的數(shù)字輸出外,它還輸出模擬速度量VEL、DC誤差信號及壓控振蕩(VCO)模擬控制信號。
1.1 功能結(jié)構(gòu)及特點(diǎn)
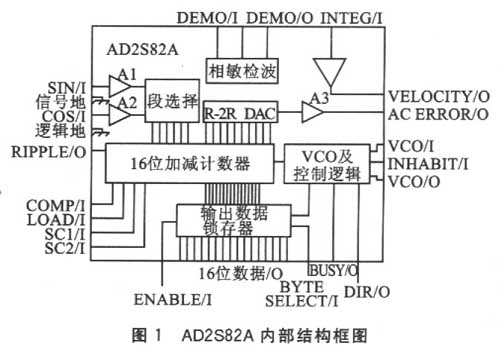
AD2S82A的內(nèi)部結(jié)構(gòu)
如圖1所示,主要由比率乘法器、相敏檢調(diào)器、壓控振蕩器(VCO)及輸出數(shù)據(jù)鎖存器構(gòu)成。其中A1、A2作為輸 信號的緩沖器,與段選擇電路、16位加減計(jì)數(shù)器、R-2R DAC及誤差信號緩沖器A3構(gòu)成比率乘法器,作為AD2S82A的輸入電路,主要負(fù)責(zé)將從旋轉(zhuǎn)變壓器輸入的角度信號θ與16位加減計(jì)數(shù)器中的數(shù)字角φ作比較,并產(chǎn)生一個(gè)與兩個(gè)角度差相關(guān)聯(lián)的模擬電壓信號(AC ERROR)。該信號表示為A1 Sin(θ-φ)sinωt。Al為比率乘法器的增益系數(shù),ω=2fREF。相敏檢調(diào)器的作用是把AC ERROR信號中所含旋轉(zhuǎn)變壓器輸入的角度θ與16位加減計(jì)數(shù)器中的數(shù)字角θ的角度差信號檢測出來,并以直流模擬電壓信號輸出。壓控振蕩器(VCO)是一個(gè)控制16位加減計(jì)數(shù)器的電路,根據(jù)其輸入信號電壓的大小,控制16位加減計(jì)數(shù)器是進(jìn)行加計(jì)數(shù)還是進(jìn)行減計(jì)數(shù)。輸出數(shù)據(jù)鎖存器用于保存變換器的輸出數(shù)據(jù),便于計(jì)算機(jī)或其他設(shè)備讀取。
AD2S82A具有尺寸小,功耗低(300 mW),靈活性好的特點(diǎn),用戶通過2個(gè)引腳CSl和CS2可選擇10、1 2、14、16位分辨率。芯片采用了速率跟蹤轉(zhuǎn)換技術(shù)實(shí)現(xiàn)了連續(xù)不間斷的相位數(shù)據(jù)輸出,除無變換延時(shí)外,轉(zhuǎn)換處理與信號幅度的絕對值關(guān)聯(lián)不大。它還具有良好的噪聲抑制并容許參考信號及輸入信號存在一定的諧波失真;通過選擇外部電阻及電容的數(shù)值,用戶可以決定帶寬、最大跟蹤速率以及轉(zhuǎn)換器的速度量程.以適應(yīng)不同的系統(tǒng)要求;所需的外圍器件為價(jià)格較低廉的電容和電阻,而且它們的取值通過簡單的計(jì)算就可得到;具有速度控制信號的模擬量輸出,其線性度可達(dá)l%,在許多應(yīng)用場臺中,這個(gè)信號可作為速度傳感器信號,為閉環(huán)馬達(dá)控制提供穩(wěn)定的速度反饋。
1.2 引腳說明
AD2S82A的引腳按功能分為直流供電引腳、模擬信號輸入腳、控制信號輸入腳、狀態(tài)信號輸出腳、數(shù)字信號輸出腳、模擬速度量及VC0控制輸出腳。
1.2.1 直流供電引腳
直流供電引腳包括+VL、+Vs、一Vs、數(shù)字地及模擬地。+Vs、-Vs為片內(nèi)模擬電路的工作電壓,分別接+12V和一12V。VL為片內(nèi)數(shù)字電路的工作電壓,其電壓可接+5V DC至+Vs。模擬地與數(shù)字地必須在外部連接。
1.2.2 模擬信號輸入腳
模擬信號輸入腳包括用于連接到旋轉(zhuǎn)變壓器的SIN信號、COS信號、參考信號和信號地。信號地在芯片內(nèi)部已與模擬地相連。為了減小信號之間互相耦合的影響,SIN信號、COS信號和參考信號應(yīng)分別采用雙絞線連接,它們的信號地線匯接到芯片的信號地引腳上。3個(gè)輸入信號的電壓幅度(有效值)要求為2 V,允許有10%的波動范固。如果信號電壓的波動超過10%,則將導(dǎo)致輸出數(shù)據(jù)的精度降低。信號允許的諧波失真率為10%。
1.2.3 控制信號輸入腳
控制信號輸入腳包括INHIBIT、ENABLE、BYTESELECT以及SCl和SC2。通過設(shè)置SCl和SC2的邏輯狀態(tài),用戶可以自行選擇變換器輸出數(shù)據(jù)的分辨率(10、12、14和16位)。需要注意的是,分辨率的改變,會影響到外部元件R4和R6的選擇(見第3部分,外圍元件的連接及選擇)。通常INHIBIT腳與計(jì)算機(jī)的CS信號相連接。將該信號置為低電平,用于把加減計(jì)數(shù)器的數(shù)值打入到鎖存器中,600ns后可從鎖存器中讀出有效數(shù)據(jù),1NHIBIT變高將會自動產(chǎn)生一個(gè)BUSY脈沖信號,以刷新輸出數(shù)據(jù)。ENABLE腳通常與計(jì)算機(jī)的RD信號相連接。當(dāng)該信號為高電平時(shí),數(shù)字輸出引腳全部為高阻狀態(tài);當(dāng)該信號為低電平時(shí),將鎖存器中的數(shù)據(jù)置到數(shù)據(jù)輸出引腳。該信號的操作不會影響變換器的工作。BYTESELECT引腳用于數(shù)據(jù)輸出的字節(jié)選擇,當(dāng)用戶使用8位寬度的數(shù)據(jù)總線時(shí),只需將變換器的高8位連接到數(shù)據(jù)總線上;在ENABLE為低的情況下,當(dāng)BYTE SELECT為高電平時(shí),變換器將高8位數(shù)據(jù)輸出到數(shù)據(jù)總線;當(dāng)BYTE SELECT為低電平時(shí),變換器將低8位數(shù)據(jù)輸出到數(shù)據(jù)總線。如果用戶使用16位寬度的數(shù)據(jù)總線,將變換器的數(shù)據(jù)輸出全量與數(shù)據(jù)總線相連接,并將BYTE SELECT腳置為高電平或懸空。注意:當(dāng)變換器的分辨率被選擇為非16位時(shí),無用的數(shù)據(jù)位將被強(qiáng)置為低電平。BYTE SELECT信號的操作同樣不影響變換器的工作。
1.2.4 狀態(tài)信號輸出腳
器件的狀態(tài)信號輸出腳包括BUSY(忙)、DIR(正/反轉(zhuǎn))及RIPPLE(過零)信號。BUSY引腳為計(jì)算機(jī)查詢變換器的工作狀態(tài)提供了方便,當(dāng)輸入到變換器的SIN和C0S信號發(fā)生變化時(shí),BUSY腳輸出一連串TTL電平脈沖。當(dāng)BUSY為高電平時(shí),表示變換器內(nèi)部的二階電子伺服環(huán)路正在工作,加減計(jì)數(shù)器正在發(fā)生變化,數(shù)字輸出端的數(shù)據(jù)不能直接輸出;反之,可從數(shù)字輸出端直接讀取數(shù)據(jù)。DIR引腳的輸出表示旋轉(zhuǎn)變壓
器的轉(zhuǎn)動方向,DIR狀態(tài)的變化超前于相應(yīng)的BUSY、輸出數(shù)據(jù)及:RIPPLE信號的變化,在兩個(gè)連續(xù)LSB變化周期之間可能發(fā)生多次DIR的變化。RIPPLE引腳在變換器輸出產(chǎn)生進(jìn)位(比如由全l變?yōu)槿玂或相反)時(shí),即輸入完成1周旋轉(zhuǎn)或1個(gè)節(jié)距時(shí),輸出1個(gè)正跳變脈沖,脈沖寬度大于300 ns。
1.2.5 模擬速度量VEL及DO誤差信號輸出腳
變換器產(chǎn)生一個(gè)表示輸入角變化率的直流模擬輸出信號VEL,在許多場合中,可用于替代傳統(tǒng)的測速傳感器信號。DC誤差信號由相敏檢波器產(chǎn)生,表示輸入角與輸出的數(shù)字角度之間的誤差量,也是一個(gè)直流模擬電壓信號。其電壓值與輸入和輸出角之差成正比。
1.2.6 數(shù)字輸出腳
旋轉(zhuǎn)變壓器的角位移量經(jīng)過變換后,以二進(jìn)制碼的形式并行輸出。根據(jù)用戶對分辨率及精度的不同要求,變換器有10、12、14及16位數(shù)字輸出可供選擇。
1.3 數(shù)據(jù)傳輸
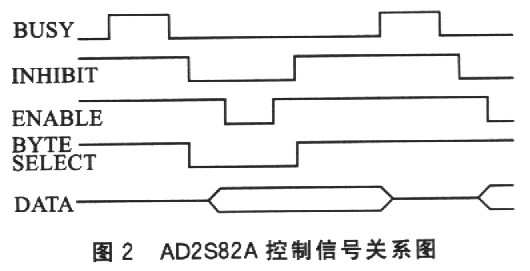
從變換器讀取旋轉(zhuǎn)角數(shù)據(jù)時(shí),應(yīng)遵循以下步驟:檢測BUSY信號,若BUSY為“1”,則數(shù)據(jù)無效,反之?dāng)?shù)據(jù)有效;給INHIBIT腳加低電平;等待600ns后,給ENABLE腳加低電平,行有效數(shù)據(jù)的讀取。其信號關(guān)系如圖2所示。
2 硬件電路設(shè)計(jì)
利用AD2S82A豐富的片內(nèi)資源及其靈活的外圍電路設(shè)置,可設(shè)計(jì)出適用于不同雷達(dá)、不同用戶需求的雷達(dá)方位角數(shù)字變換器,硬件電路構(gòu)成如圖3所示。該硬件電路系統(tǒng)由輸入信號緩沖電路、AD2S82A及其外圍電路、電源模塊及讀取和向上位機(jī)傳送方位角數(shù)據(jù)的微處理器幾部分構(gòu)成。其中電源模塊為微處理器及AD2S82A提供+5V數(shù)字電源,為AD2S82A及輸入信號緩沖電路提供士12V電源。
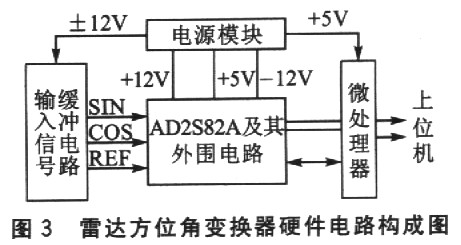
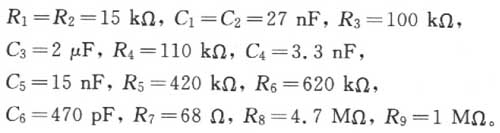
圖4為一種適用于具有旋轉(zhuǎn)變壓器的雷達(dá)方位角數(shù)字變換器的電原理圖。與天線隨動的旋轉(zhuǎn)變壓器使用400 Hz、115V交流激磁電壓,輸出最大90 V的sin和cos旋轉(zhuǎn)角信號。數(shù)據(jù)分辨率采用12位,由8位單片機(jī)AT89C205l讀取變換后的數(shù)據(jù),并向上位機(jī)傳送。AD2S82A的外圍器件根據(jù)要求,按第3部分的方法選取并連接。經(jīng)計(jì)算,在圖5中它們的取值為:
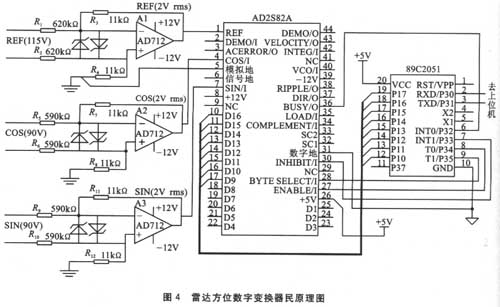
系統(tǒng)的工作過程:從與雷達(dá)天線同步的旋轉(zhuǎn)變壓器來的115V、400 Hz激磁信號輸入到由R1、R2、R2、R4及運(yùn)放A1組成的衰減緩沖電路后。產(chǎn)生AD2S82A所需的2V(有效值)參考信號。同樣,旋轉(zhuǎn)變壓器輸出的sin和cos信號也經(jīng)過相似的衰減緩沖電路,產(chǎn)生AD2S82A所需的2V(有效值)sin及cos信號。它們被連接到AD2S82A相應(yīng)的輸入端,經(jīng)AD2S82A變換后,在其數(shù)據(jù)輸出端產(chǎn)生與雷達(dá)天線方位角對應(yīng)的二進(jìn)制數(shù)字信號。由單片機(jī)讀取方位角的二進(jìn)制數(shù)字信號,并進(jìn)行相應(yīng)的轉(zhuǎn)換處理,最后向上位機(jī)傳送雷達(dá)天線的方位角度值。衰減緩沖電路中電阻值的選取,耍根據(jù)不同型號的旋轉(zhuǎn)變壓器選取不同的數(shù)值。每個(gè)運(yùn)放輸入端的齊納二極管,是為了保護(hù)運(yùn)放不被高壓擊毀。對于使用同步機(jī)的其他型號雷達(dá),衰減緩沖電路應(yīng)設(shè)計(jì)成斯考特電路或采用斯考特輸入變壓器。關(guān)于斯考特電路這里不作討論。
3 外圍元件的連接及選擇
為了實(shí)現(xiàn)旋轉(zhuǎn)角的數(shù)字變換,AD2S82A還需要一些外圍輔助電路。這些電路的工作特性除了能夠影響變換電路的整體動態(tài)特性外,甚至還能影響到電路的變換精度。因此,外圍元件的選擇顯得格外重要。AD2S82A的外圍電路連接如圖5所示。
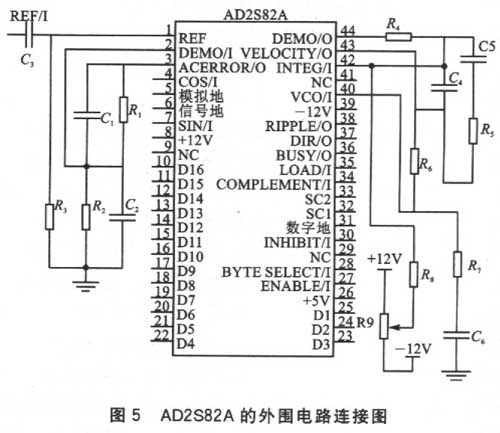
①Rl、C1、R2、C2構(gòu)成HF濾波器。其作用是去除直流偏移并減小輸入信號中噪聲信號對相敏解調(diào)及輸出數(shù)據(jù)的影響。
fREF為參考信號的頻率,單位為Hz。
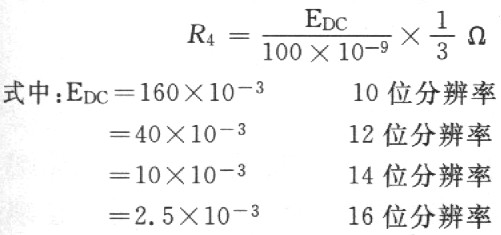
②R4為DC誤差信號的增益調(diào)整電阻。在選擇好Rl和C2之后,R4應(yīng)根據(jù)如下公式計(jì)算:
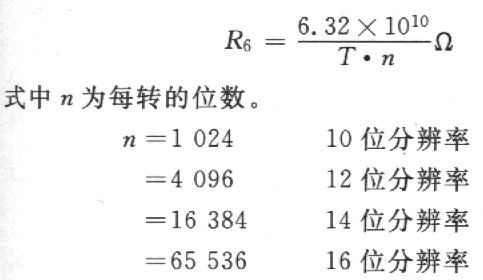
③R6是決定變換器電路最大跟蹤速度的電阻。根據(jù)用戶對最大跟蹤速度的要求,由下式計(jì)算R6的值(注意,最大跟蹤速度為每秒T轉(zhuǎn),不能大于參考信號頻率的1/16):
④C4、C5和R5構(gòu)成閉環(huán)帶寬(fBW)選擇電路。對于400 Hz的參考信號,典型的帶寬取值為100 Hz;對于5000 Hz的參考信號,典型的帶寬取值為500~1000 Hz。要求該電路能確保參考信號的頻率與帶寬之比大于下列數(shù)值的要求:
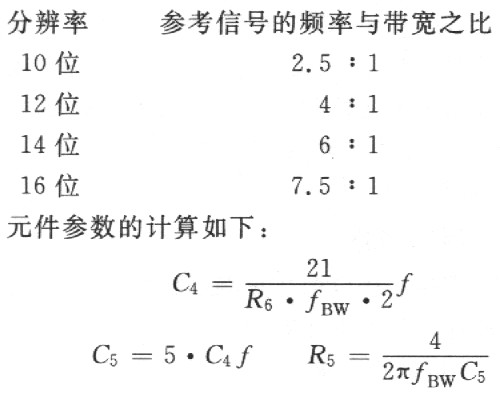
式中:R6的單位為Ω,fBW的單位為Hz。
⑤R3和C3構(gòu)成參考信號的交流耦合電路。為R3和C3選擇適當(dāng)?shù)闹担墒箙⒖夹盘枱o相位偏移。這里R3=100kΩ。
⑥C6和R7構(gòu)成VC0的相位補(bǔ)償電路。它們的取值為:
C6=470pF,R7=68Ω
⑦R8和R9組成偏置調(diào)整電路,保證其所接輸入端的直流電平為OV。它們的取值為:
R8=4.7 MΩ,R9為lMΩ的多圈電位器。
4 軟件設(shè)計(jì)
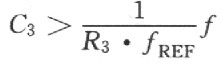
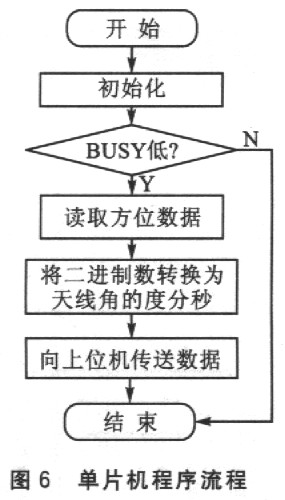
電路中單片機(jī)89C2051的主要功能是讀取AD2S82A產(chǎn)生的方位角二進(jìn)制數(shù)字并經(jīng)串口向上位機(jī)傳送。其程序的主要模塊包括:單片機(jī)及串口初始化、數(shù)據(jù)讀取、數(shù)據(jù)轉(zhuǎn)換及數(shù)據(jù)上報(bào)。注意:在設(shè)計(jì)數(shù)據(jù)讀取程序時(shí),由于采用了8位寬度的數(shù)據(jù)總線,所以在讀取方位角數(shù)據(jù)時(shí),應(yīng)分兩次讀取,第一次讀取高位,第二次讀取低位數(shù)據(jù)。圖6為單片機(jī)程序流程。讀取方位數(shù)據(jù)的程序?yàn)椋?/p>
結(jié)語
具有高集成度的AD2S82A,體積小,靈活性強(qiáng),大大方便了旋轉(zhuǎn)角的數(shù)字變換。用它設(shè)計(jì)的旋轉(zhuǎn)角數(shù)字變換電路,電路簡單,轉(zhuǎn)換精度高,工作穩(wěn)定可靠,適用性強(qiáng)。另外,由于它還有模擬量信號的輸出,還可應(yīng)用于交流馬達(dá)控制、過程控制和機(jī)器人等領(lǐng)域。