
引 言
近年來,隨著我國汽車工業(yè)的快速發(fā)展和汽車保有量的大幅增加,汽車檢測技術(shù)也取得了巨大的進步,汽車檢測設(shè)備的功能、質(zhì)量都在不斷提高,正逐步向數(shù)字化、智能化、便攜化方向發(fā)展。作為汽車檢測的基本設(shè)備,四輪定位儀是專門用來測量車輪定位參數(shù)的設(shè)備。國內(nèi)市場上常見的四輪定位儀主要是拉線式和無線測量有線傳輸式兩種,未來的發(fā)展趨勢是全無線式。如何利用低成本的無線傳輸技術(shù)改造現(xiàn)有的有線數(shù)據(jù)傳輸系統(tǒng),就成了工程上很有意義的問題。本文利用低成本的無線傳輸藍牙技術(shù),提出了一種改造現(xiàn)有汽車四輪定位系統(tǒng)的方案,詳細說明了無線化汽車四輪定位系統(tǒng)的軟、硬件設(shè)計方法。
1 傳統(tǒng)設(shè)計的問題和解決方案
1.1 傳統(tǒng)設(shè)計的問題
汽車在出廠時,其懸掛系統(tǒng)的定位角度都是設(shè)定好的,但是車輛在行駛一段時間后,這些定位角度會產(chǎn)生變化。定位系統(tǒng)是1個主控電腦和4個安裝在四輪上的傳感器。檢測時,四輪定位儀測量出汽車現(xiàn)時的四輪定位參數(shù),將數(shù)據(jù)傳回主控電腦;主控電腦將顯示汽車測量的數(shù)據(jù)列表,并與原廠的數(shù)據(jù)相比較,計算出偏差值,再對小車相關(guān)的部位進行恰當?shù)恼{(diào)節(jié)。
傳統(tǒng)的汽車四輪定位儀是依靠有線方式和主電腦通信的,使用起來有諸多限制。四輪定位儀價格昂貴,國產(chǎn)的一般在十幾萬元以上,進口的則更貴,一般都在20萬元以上。所以要想將其無線化,最好的方案是保留原有的硬件系統(tǒng),僅添加無線收發(fā)單元的軟硬件,以免汽車維修站二次投資。
1.2 無線化解決方案
工業(yè)場合經(jīng)常需要無線傳輸數(shù)據(jù),比如光纖制造時拉伸晶體用的超高溫熱爐需要把溫度數(shù)據(jù)傳送出來。藍牙模塊體積小,不受障礙物和角度限制,價格也相對低廉,比較適合。除了某些專用的藍牙模塊以外,大多藍牙模塊硬件上都提供了數(shù)據(jù)接口,通過RS232串口可以傳輸對速率要求不高的實時數(shù)據(jù)。
本文選擇藍牙技術(shù)來設(shè)計無線化傳統(tǒng)汽車四輪定位系統(tǒng)。藍牙工作在免費的ISM頻段,且發(fā)射功率比較小(一般為1~10 mW),不會對汽車維修站的其他電氣設(shè)備產(chǎn)生無線電干擾,很適合汽車維修場合應(yīng)用。藍牙采用點對點或者點對多點的主從網(wǎng)絡(luò)方案,藍牙四輪定位網(wǎng)絡(luò)采用1個主設(shè)備和4個從設(shè)備的方案,如圖1所示。這是由于現(xiàn)代轎車普遍都是前后獨立懸掛,所以前、后車輪各自需要調(diào)整的參數(shù)是獨立的,不能采用一主一從的點對點方案,而要用一主四從的方案。

2 系統(tǒng)硬件設(shè)計
2.1 硬件總體設(shè)計
藍牙主設(shè)備是具有無線收發(fā)功能的主控電腦,負責查詢四輪的狀態(tài),并且向四輪發(fā)送調(diào)整指令;藍牙從設(shè)備是4個安裝在汽車車輪上的測量傳感儀器,負責測量四輪的狀態(tài)參數(shù),并且把測量得到的參數(shù)無線傳回主控電腦。主控電腦里存儲了該車型的標準資料,它無線接收四輪傳來的數(shù)據(jù)(即汽車現(xiàn)時的四輪定位參數(shù)),并與該車型的存儲值對比算出偏差,做出相應(yīng)判斷,再把調(diào)整指令無線發(fā)送給四輪。據(jù)此要求,硬件系統(tǒng)結(jié)構(gòu)如圖2所示。

2.2 硬件工作流程
圖2中的單片機C和測量傳感儀器屬于無線化以前的傳統(tǒng)汽車四輪定位儀。測量儀測得汽車車輪的角度等參數(shù),通過傳感器發(fā)給單片機C。
四輪的狀態(tài)參數(shù)傳回主控電腦的過程如下:單片機C得到車輪傳感器的數(shù)據(jù),通過UART口傳給單片機A;單片機A把數(shù)據(jù)通過藍牙從設(shè)備無線發(fā)送給主控電腦端的藍牙主設(shè)備;單片機B從藍牙主設(shè)備獲得數(shù)據(jù)后,通過轉(zhuǎn)換芯片轉(zhuǎn)換為標準的RS232串口形式,再通過PC機上的標準9針串口送給主控電腦。主控電腦向四輪發(fā)送調(diào)整命令的流程與此類似。
這樣,只需在傳統(tǒng)的四輪定位系統(tǒng)上附加一些元件就實現(xiàn)了無線化,方便了汽車維修公司。
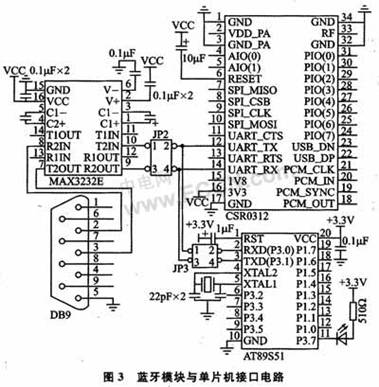
2.3 藍牙模塊與單片機接口電路設(shè)計
◆遵從藍牙1.1規(guī)范;
◆射頻輸出為class2級,作用距離10 m;
◆藍牙1.1認證;
◆FCC&ETST認證;
◆支持UART接口。
3 系統(tǒng)軟件設(shè)計
……
MOV DPTR,#HCIDisConnect
……
