
引言
“X型火控系統(tǒng)”根據(jù)實(shí)際需要采用了CAN總線方式來實(shí)現(xiàn)其內(nèi)部單體間的通信。CAN總線是一種用于各種設(shè)備檢測(cè)及控制的現(xiàn)場(chǎng)總線,它是一種多主總線,在高速網(wǎng)絡(luò)和低成本的節(jié)點(diǎn)系統(tǒng)中應(yīng)用都很廣泛。CAN總線與一般的通信總線相比,它的數(shù)據(jù)通信具有突出的可靠性、實(shí)時(shí)性和靈活性。其特點(diǎn)如下:
*可以多主方式工作。
*CAN節(jié)點(diǎn)只需對(duì)報(bào)文的標(biāo)識(shí)符濾波即可實(shí)現(xiàn)點(diǎn)對(duì)點(diǎn)、一點(diǎn)對(duì)多點(diǎn)及全局廣播方式發(fā)送和接收數(shù)據(jù)。
*CAN總線通信格式采用短幀格式。
*采用非破壞性總線仲裁技術(shù)。
*直接通信距離最大可達(dá)10km (速率5kb/s以下),最高通信速率可達(dá)1Mb/s (此時(shí)距離最長(zhǎng)為40m),節(jié)點(diǎn)數(shù)可達(dá)110個(gè),通信介質(zhì)可以是雙絞線、同軸電纜或光導(dǎo)纖維。
*CAN總線采用CRC檢驗(yàn)并可提供相應(yīng)的錯(cuò)誤處理功能,保證了數(shù)據(jù)通信的可靠性。
C8051F040及其內(nèi)部CAN控制器
C8051F040內(nèi)部集成有CAN控制器,主要由CAN內(nèi)核、消息RAM、消息處理單元和控制寄存器組成,圖1為C8051F040集成CAN的結(jié)構(gòu)圖。
圖1中,CAN內(nèi)核由CAN控制器和負(fù)責(zé)消息收發(fā)的內(nèi)部寄存器組成,消息RAM用于存儲(chǔ)消息目標(biāo)和每個(gè)目標(biāo)的仲裁掩碼,并且每一個(gè)消息目標(biāo)都有它自己的識(shí)別掩碼,所有的數(shù)據(jù)傳輸和接收濾波都是由CAN控制器完成的。消息處理單元用于根據(jù)寄存器中的信息來控制CAN內(nèi)核中移位寄存器和消息RAM之間的數(shù)據(jù)傳遞,同時(shí)它還可用來管理中斷的產(chǎn)生。
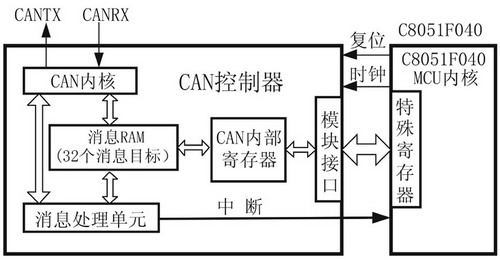
圖1 C8051F040集成CAN的結(jié)構(gòu)圖
CAN內(nèi)部寄存器中存儲(chǔ)了所有CAN的控制和配置信息,其中包括控制寄存器、狀態(tài)寄存器、設(shè)置波特率的位定時(shí)寄存器 、測(cè)試寄存器、錯(cuò)誤計(jì)數(shù)器和消息接口寄存器。通常CAN內(nèi)核不能直接訪問消息RAM,而必須通過接口寄存器IF1或IF2來訪問。另外,CIP-51的SFR并不能直接訪問CAN內(nèi)部寄存器的所有單元,其配置CAN、消息目標(biāo)、讀取CAN狀態(tài)以及獲取接收數(shù)據(jù)、傳遞發(fā)送數(shù)據(jù)都由SFR中的6個(gè)特殊寄存器來完成。其中CAN0CN、CAN0TST和CAN0STA3個(gè)寄存器可直接獲取或修改CAN 控制器中對(duì)應(yīng)的寄存器,而CAN0DATH、CAN0DATL、CAN0ADR 3個(gè)寄存器主要用來訪問修改其它不能直接訪問CAN內(nèi)部寄存器,其中CAN0ADR用來指出要訪問寄存器的地址,CAN0DATH、CAN0DATL這時(shí)就相當(dāng)于要訪問的16位寄存器的高、低字節(jié)的映射寄存器,而對(duì)它們的讀寫則相當(dāng)于對(duì)所指向寄存器的讀寫。圖2給出了CIP-51如何訪問CAN中控制寄存器和每個(gè)消息的路徑圖。

圖2 CIP-51訪問CAN中控制寄存器和每個(gè)消息的路徑圖
基于C8051F040的CAN智能節(jié)點(diǎn)設(shè)計(jì)
由于CAN總線采用多主方式工作,所以CAN總線系統(tǒng)具有與DCS(分布式控制系統(tǒng))不一樣的拓?fù)浣Y(jié)構(gòu)。圖3所示是某型火控系統(tǒng)的總線系統(tǒng)結(jié)構(gòu)。該系統(tǒng)結(jié)構(gòu)最大的特點(diǎn)就是所有的節(jié)點(diǎn)都能以平等的地位掛接在總線上。CAN總線智能節(jié)點(diǎn)之間能夠相互進(jìn)行通信,以完成數(shù)據(jù)交換。一個(gè)智能節(jié)點(diǎn)通常至少包括三個(gè)部分,即負(fù)責(zé)節(jié)點(diǎn)任務(wù)控制的單片機(jī)、總線控制器及總線收發(fā)器。由于C8051F040單片機(jī)為內(nèi)部集成有CAN控制器,因此智能節(jié)點(diǎn)主要由C8051F040和CAN收發(fā)器TJA1050組成。
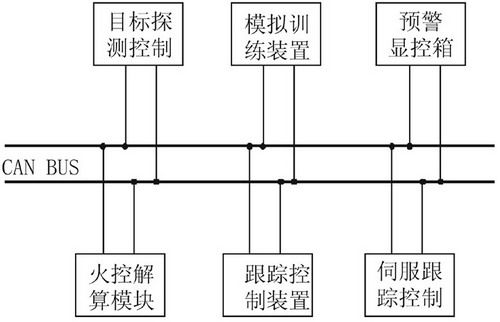
圖3 某型火控系統(tǒng)的CAN總線結(jié)構(gòu)
圖4是一個(gè)以C8051F040為核心的智能節(jié)點(diǎn)硬件框圖。由于C8051F040集成的是CAN控制器,要使CAN總線得以運(yùn)行,還需外加CAN總線收發(fā)器,常用的CAN總線收發(fā)器有Philips公司的PCA82C250收發(fā)器、高速TJA1050收發(fā)器等。本系統(tǒng)采用了TJA1050高速CAN收發(fā)器來替代傳統(tǒng)的PCA82C250收發(fā)器,TJA1050具有電磁輻射低、防短路、不上電時(shí)對(duì)總線無影響等特點(diǎn),它的引腳S可以選擇高速或靜音兩種模式,并可由C8051F040的P4.0控制,CAN總線上兩端節(jié)點(diǎn)8一般加上兩個(gè)60W的電阻和47nf的電容對(duì)信號(hào)吸收,以避免信號(hào)反射。為了進(jìn)一步提高系統(tǒng)的抗干擾能力,在CAN控制器引腳CANTX、CANRX和收發(fā)器TJA1050之間并不是直接相連,而是通過由高速光耦6N137構(gòu)成的隔離電路后再與TJA1050相連,這樣就可以很好的實(shí)現(xiàn)總線上各節(jié)點(diǎn)的電氣隔離。這部分增加了節(jié)點(diǎn)的復(fù)雜性,但它卻提高了節(jié)點(diǎn)的穩(wěn)定性和安全性。
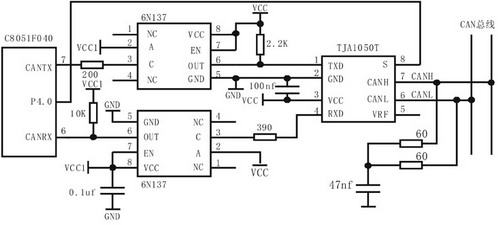
圖4 智能節(jié)點(diǎn)硬件框圖
CAN智能節(jié)點(diǎn)主要完成的任務(wù)是:將相關(guān)數(shù)據(jù)數(shù)傳送給其它節(jié)點(diǎn),同時(shí)從總線上接收本節(jié)點(diǎn)所需要的數(shù)據(jù)。因此智能節(jié)點(diǎn)的CAN通信主要包括系統(tǒng)初始化程序、發(fā)送程序、接收程序等。在本例中,系統(tǒng)軟件采用結(jié)構(gòu)化程序設(shè)計(jì)方案,使其具有較好的模塊性和可移植性,對(duì)于不同的系統(tǒng)功能或不同的應(yīng)用環(huán)境,可以方便地進(jìn)行編程重組。
系統(tǒng)初始化程序
初始化程序主要完成對(duì)所有的報(bào)文對(duì)象進(jìn)行初始化(一般將所有值置零),對(duì)CAN控制寄存器(CAN0CN)、位定時(shí)寄存器(BITREG)進(jìn)行設(shè)置,還要對(duì)發(fā)送報(bào)文對(duì)象和接收?qǐng)?bào)文對(duì)象分別進(jìn)行初始化。其中,位定時(shí)寄存器的設(shè)置較為復(fù)雜,這里我們使用外部晶振為8MHz,CAN通信速率為500k/s,得到BITREG的初始值為0x2301。主程序中規(guī)定對(duì)象初始化、發(fā)送和接收初始化,最后才啟動(dòng)CAN處理機(jī)制(對(duì)BITREG和CAN0CN初始化),下面為CAN啟動(dòng)程序:
void start_CAN(void){
SFPRAGE=CAN0_PAGE; //指向CAN0
頁面
CAN0CN|=0x41; //將CCE和Init置“1”
開始初始化
CAN0ADR=BITREG; //指向位定時(shí)寄存器
進(jìn)行配置
CAN0DAT=0x2301; //位率為500k/s
CAN0CN|=0x06; //允許全局中斷,IE和
SIE置位
CAN0CN &=~0x41; //清楚CCE和INIT
位,啟動(dòng)CAN狀態(tài)機(jī)制
}
發(fā)送程序
CAN報(bào)文發(fā)送是由CAN控制器自動(dòng)完成的,用戶只需根據(jù)接收到的遠(yuǎn)程幀的識(shí)別符,將對(duì)應(yīng)的數(shù)據(jù)轉(zhuǎn)移到發(fā)送緩沖寄存器,然后將此報(bào)文對(duì)象的編碼寫入命令請(qǐng)求寄存器啟動(dòng)發(fā)送即可,而發(fā)送由硬件來完成。這里,我們使用定時(shí)更新發(fā)送報(bào)文對(duì)象中的數(shù)據(jù),數(shù)據(jù)的發(fā)送有控制器自動(dòng)完成,當(dāng)其收到一個(gè)遠(yuǎn)程幀時(shí),就將具有相同識(shí)別符的數(shù)據(jù)幀發(fā)送出去。其發(fā)送程序結(jié)構(gòu)如下:
void transmit_message(char MsgNum) {
uchar i;
SFRPAGE=CAN0_PAGE; //指向CAN0
頁面
CAN0ADR=IF1CMDMSK; //向IF1命令
屏蔽寄存器寫入命令
CAN0DAT =0x0083; //位率為500k/s
CAN0ADR=IF1ARB2;//指向IF1仲裁
寄存器2
CAN0DATH |= 0x80;
CAN0ADR=IF1DATA1; //指向數(shù)據(jù)
場(chǎng)的第一個(gè)字節(jié)
for(i=0;i<4;i++){
CAN0DATH=can_temp[i]; //將4字節(jié)數(shù)據(jù)
寫入發(fā)送緩沖器
}
CAN0ADR=IF1CMDRQST;
CAN0DATL=MsgNum;//將報(bào)文對(duì)象編
號(hào)寫入,則數(shù)據(jù)發(fā)送到
對(duì)應(yīng)的報(bào)文對(duì)象
}
接收程序
CAN報(bào)文的接收與發(fā)送一樣,是由CAN控制器自動(dòng)完成的,接收程序只需從接收緩存器中讀取接收的數(shù)據(jù),再進(jìn)行相應(yīng)的處理即可。其基本方法與發(fā)送程序一致,只是接收程序采用中斷方式。在此應(yīng)用中,接收程序主要接收上位機(jī)對(duì)智能節(jié)點(diǎn)的參數(shù)設(shè)置數(shù)據(jù),只有當(dāng)修改時(shí)才需要接收數(shù)據(jù),所以采用中斷方式處理比較合適。接收程序結(jié)構(gòu)如下:
void receive_data(void) {
SFRPAGE=CAN0_PAGE; //指向CAN0\頁面
CAN0ADR=IF2CMDMSK; //向IF2命令
屏蔽寄存器寫命令
CAN0DATH =0x00; //位率為500k/s
CAN0DATL =0x3F;
CAN0ADR=IF2CMDRQST; //將報(bào)文對(duì)象
編號(hào)寫入命令請(qǐng)求寄存
器,對(duì)應(yīng)接收 CAN0DATL=MsgNum; //得到數(shù)據(jù)就從報(bào)
文RAM中移到數(shù)據(jù)
緩沖器中
CAN0ADR=IF2DATA1; //指向數(shù)據(jù)場(chǎng)的
第一個(gè)字節(jié)
for(i=0;i<4;i++)
{CAN_RX[i]=CAN0DAT; //讀取
4個(gè)字節(jié)數(shù)據(jù)
}
}
結(jié)語
在CAN總線的開發(fā)試驗(yàn)過程中,經(jīng)過實(shí)際測(cè)試,我們?cè)O(shè)計(jì)的基于C8051F040的CAN總線智能節(jié)點(diǎn)具有集成度高、性能穩(wěn)定、抗電磁干擾能力強(qiáng)等特點(diǎn)。在通信波特率設(shè)置為500kbps時(shí)通信順暢,實(shí)現(xiàn)了某型火控系統(tǒng)內(nèi)部單體間通信的可靠性、實(shí)時(shí)性、靈活性。
參考文獻(xiàn):
1. 鄔寬明,CAN總線原理和應(yīng)用系統(tǒng)設(shè)計(jì),北京航空航天出版社,1996.
2. 童長(zhǎng)飛,C8051F系列單片機(jī)開發(fā)與C語言編程,北京航空航天出版社,2005.
3. 饒運(yùn)濤,現(xiàn)場(chǎng)總線CAN原理及應(yīng)用技術(shù),航空航天大學(xué)出版社,2003.