
1 工業(yè)以太網(wǎng)實(shí)時性能評價沒有統(tǒng)一的標(biāo)準(zhǔn)
根據(jù)文獻(xiàn)[1],某種報文的實(shí)時性得到滿足是指其報文響應(yīng)時間小于規(guī)定的時限,某個節(jié)點(diǎn)的實(shí)時性合乎要求是指該節(jié)點(diǎn)發(fā)出的所有報文在指定的時限內(nèi)都能獲得響應(yīng)。整個控制網(wǎng)絡(luò)的實(shí)時性符合要求是指分布在網(wǎng)絡(luò)上每一個節(jié)點(diǎn)的每一種報文的實(shí)時性均得到保證。整個網(wǎng)絡(luò)的實(shí)時性必須滿足下列三個時間約束條件:
1)每個節(jié)點(diǎn)獲得通信權(quán)的時間必須有上限值限制。若超過此值,無論本次通信任務(wù)是否完成,均應(yīng)立即釋放通信權(quán)。這一時間約束條件可以防止某一節(jié)點(diǎn)長時間占用總線而導(dǎo)致其它各節(jié)點(diǎn)實(shí)時性惡化。
2)應(yīng)當(dāng)保證在某一固定的時間周期內(nèi),網(wǎng)絡(luò)上的每一個節(jié)點(diǎn)都有機(jī)會取得通信權(quán),以防個別節(jié)點(diǎn)因長時間得不到通信權(quán)而使其實(shí)時性太差甚至喪失實(shí)時性。只要有一個節(jié)點(diǎn)出現(xiàn)這種情況,整個網(wǎng)絡(luò)的實(shí)時性得不到保證。這一固定時間周期的長短是控制網(wǎng)絡(luò)實(shí)時性好壞的一個衡量標(biāo)準(zhǔn)。
3)對于緊急任務(wù),當(dāng)其實(shí)時性要求臨時變得很高時,應(yīng)當(dāng)給以優(yōu)先服務(wù)。對于實(shí)時性要求比較高的節(jié)點(diǎn),也應(yīng)當(dāng)使它取得通信權(quán)的機(jī)會比其它節(jié)點(diǎn)多一些。因此采用靜態(tài)(固定)的方式賦予某些節(jié)點(diǎn)較高的優(yōu)先權(quán),采用動態(tài)(臨時)的方式賦予某些通信任務(wù)以比較高的優(yōu)先權(quán),則將使緊急任務(wù)及重要節(jié)點(diǎn)的實(shí)時性得到滿足。
如果簡單的用這三條時間約束條件去衡量目前控制網(wǎng)絡(luò)中常用的訪問控制方式,會發(fā)現(xiàn)有些存取控制方法一條約束條件也不滿足,如Lonwork現(xiàn)場總線的 CSMA/CD方式。而按照這一原則,似乎只有令牌協(xié)議能夠滿足實(shí)際要求。但是在實(shí)際系統(tǒng)應(yīng)用中,其他的訪問控制方式一樣在實(shí)時性極強(qiáng)的系統(tǒng)中采用,如波音公司制定的Swiftnet協(xié)議在航空和航天領(lǐng)域廣泛使用,基于CSMA/CA的CAN總線協(xié)議是高級轎車內(nèi)部控制電路的標(biāo)準(zhǔn)協(xié)議規(guī)范。造成這種既成事實(shí)的原因很多,一方面隨著網(wǎng)絡(luò)技術(shù)的進(jìn)步,各種協(xié)議都在努力改進(jìn)協(xié)議性能,采用各種方法提高實(shí)時性。另一方面,通過調(diào)整網(wǎng)絡(luò)配置和負(fù)載,進(jìn)行整體優(yōu)化,達(dá)到實(shí)時性要求。
因此目前不會出現(xiàn)具體通用的工業(yè)以太網(wǎng)實(shí)時服務(wù)判定標(biāo)準(zhǔn),需要針對實(shí)際應(yīng)用和出現(xiàn)的新技術(shù)進(jìn)行實(shí)時性能評價。
2 不同工業(yè)以太網(wǎng)實(shí)時性能評價的異同
工業(yè)以太網(wǎng)可以分為兩大類:用于過程控制領(lǐng)域的工業(yè)以太網(wǎng)例如HSE以及用于離散控制領(lǐng)域的工業(yè)以太網(wǎng)例如EPL。以下通過對比用于過程控制和運(yùn)動控制領(lǐng)域的工業(yè)以太網(wǎng)實(shí)時要求及特點(diǎn)來具體反映兩者在實(shí)時性能評價方面的異同。
兩者的共同之處:網(wǎng)絡(luò)響應(yīng)時間具有統(tǒng)一的模型,網(wǎng)絡(luò)中的延遲都是其中重要組成部分。整個工業(yè)以太網(wǎng)系統(tǒng)的實(shí)時性能是由網(wǎng)絡(luò)響應(yīng)時間反映的,影響網(wǎng)絡(luò)響應(yīng)時間的因素主要來自三個部分:本地系統(tǒng),即源節(jié)點(diǎn)的處理;工業(yè)以太網(wǎng)網(wǎng)絡(luò),即傳輸部分;目的節(jié)點(diǎn)系統(tǒng),即目的節(jié)點(diǎn)的處理。
圖1是示意圖,此圖表明了從源節(jié)點(diǎn)向目的節(jié)點(diǎn)發(fā)送信息所花的時間,也就是網(wǎng)絡(luò)響應(yīng)時間Tdelay ,總的時間延遲可分成以下幾個部分:源節(jié)點(diǎn)的時間延遲、網(wǎng)絡(luò)通道上時間延遲和目標(biāo)節(jié)點(diǎn)的時間延遲。
源節(jié)點(diǎn)的時間延遲包括預(yù)處理時間Tpre,它是計(jì)算時間Tscomp和編碼時間Tscode的總和;等待時間Twait的一部分,它是節(jié)點(diǎn)內(nèi)部排隊(duì)時間(node queue)Tn-queue,取決于源節(jié)點(diǎn)需傳送數(shù)據(jù)的總和與網(wǎng)絡(luò)的傳送狀況。
網(wǎng)絡(luò)時間延遲包括:傳送時間Ttx,它是幀發(fā)送時間Tframe和網(wǎng)絡(luò)的物理傳播遲延 Tprop的總和,取決于信息的大小、數(shù)據(jù)傳送率和網(wǎng)絡(luò)纜線的長度;還有就是等待時間Twait的另外一部分,網(wǎng)絡(luò)阻塞時間Tblock;
目的節(jié)點(diǎn)的時間延遲Tpost是數(shù)據(jù)的后期處理時間,它是目的節(jié)點(diǎn)解碼時間Tdcode和目的節(jié)點(diǎn)計(jì)算時間Tdcomp的總和。
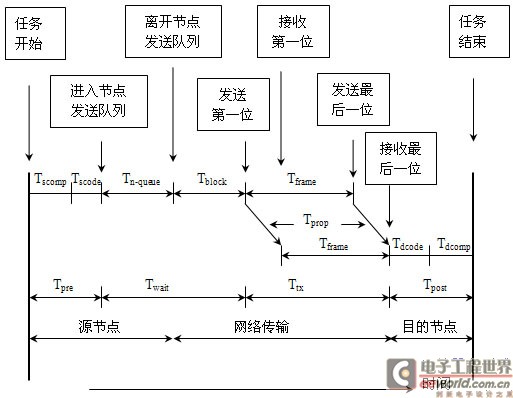
圖1 工業(yè)以太網(wǎng)響應(yīng)時間的示意圖
所以總的時間延遲可表示為:
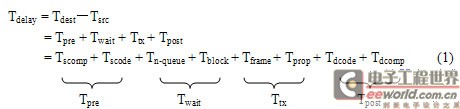
同時在圖1中,清楚的表明了工業(yè)以太網(wǎng)網(wǎng)絡(luò)傳輸部分所處的位置及其時間延遲(利用Tethernet表示):
兩者的不同之處:

用于過程控制的工業(yè)以太網(wǎng)的實(shí)時類型如圖2中的左側(cè)圖所示。
它的實(shí)時要求可以稱之為確定性的通信要求。需要多長時間來傳送該數(shù)據(jù)報文以及響應(yīng)數(shù)據(jù)的生產(chǎn)都是有時間確定性的。在工業(yè)控制系統(tǒng)中,通信網(wǎng)絡(luò)的時間確定性是指通過網(wǎng)絡(luò)傳送的數(shù)據(jù)必須在預(yù)先確定的時間內(nèi)從源傳送到目的地。也就是在截止期之內(nèi)數(shù)據(jù)報文到達(dá)接收者。
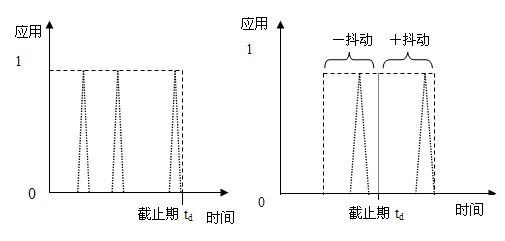
圖2 不同控制領(lǐng)域的工業(yè)以太網(wǎng)實(shí)時要求不同
用于運(yùn)動控制,精密制造的工業(yè)以太網(wǎng)的實(shí)時類型如圖2中的右側(cè)圖所示。
延遲和同步是這種類型實(shí)時數(shù)據(jù)通信的決定性因素。這種類型實(shí)時數(shù)據(jù)通信具有一個精確的可預(yù)測的定時,也就是什么時候數(shù)據(jù)報文到達(dá)接收者,生成響應(yīng)數(shù)據(jù)和需要多長時間來傳送該數(shù)據(jù)報文,都是規(guī)定好的。同步?jīng)Q定了分布式系統(tǒng)能辨識的定時事件的準(zhǔn)確度,通常是指所有部件同時執(zhí)行一個重復(fù)出現(xiàn)的動作。同步偏差可以是常量,也可以是變量,后者一般稱為抖動(Jitter),常量偏差不是關(guān)鍵且很容易被補(bǔ)償,但抖動不可能被補(bǔ)償,這個量的大小對一些控制,如運(yùn)動控制或一些高精度的閉環(huán)控制是非常關(guān)鍵的。以一個無軸印刷機(jī)為例:設(shè)印刷速度為25m/s,也就是說每40μs印刷1mm。軸間通信如果有大于40μs的抖動,就會有1mm以上的偏差,印刷質(zhì)量肯定不能滿足要求。
在位置控制、電子齒輪、多軸聯(lián)動的高精度運(yùn)動控制中,刷新時間往往是越短越好,時間越短,控制精度越高,能完成的動態(tài)性能也更高。多軸聯(lián)動中,伺服系統(tǒng)如果以 400μs的周期進(jìn)行位置控制,各軸之間的信息交換當(dāng)然也是以400μs周期為最佳,以達(dá)到軸間的最可能精確的同步。但是在相對緩慢的過程中(比如化工中的熱化),每 400μs 刷新一次通信數(shù)據(jù)就沒有什么必要。對于有較強(qiáng)實(shí)時要求的過程控制系統(tǒng)實(shí)時通信的響應(yīng)時間應(yīng)在5~10ms的范圍內(nèi),為此通常要求從某一節(jié)點(diǎn)到另一節(jié)點(diǎn)的網(wǎng)絡(luò)時間延遲要小于2~4ms。對于一般實(shí)時控制要求的網(wǎng)絡(luò)時間延遲可以更大。
3 結(jié)語
從以上分析可知,用于離散控制尤其是運(yùn)動控制,精密制造等領(lǐng)域的工業(yè)以太網(wǎng)實(shí)時性要求苛刻,除了延遲的控制,還要對抖動進(jìn)行控制是其主要難點(diǎn)。目前基于商用可得(COTS)技術(shù)的組件無法滿足運(yùn)動控制等苛刻的抖動精度要求,而用于過程控制的工業(yè)以太網(wǎng)并不需要對抖動進(jìn)行控制,實(shí)時要求沒有用于離散控制工業(yè)以太網(wǎng)的苛刻,同時商用網(wǎng)絡(luò)軟硬件技術(shù)的不斷發(fā)展,可以考慮采用COTS新技術(shù)進(jìn)行應(yīng)用研究。