
0 引言
近年來,,我國的半導體產業(yè)蓬勃發(fā)展,由于其起步較晚,,雖然生產的很多環(huán)節(jié)實現(xiàn)了高速自動化,,但集成塊的質量檢測還主要借助于人的視覺和主觀判斷能力,因而占用的大量的人力,,且由于受到個人的視力,、情緒、疲勞,、光線等因素的影響,,工作效率低,分選差異大,。本文所研究的即是計算機工業(yè)圖像檢測技術在集成塊管腳檢測" title="管腳檢測">管腳檢測中的應用,,相比較傳統(tǒng)的人工檢測,計算機圖像檢測技術有以下優(yōu)點:1)替代人力減少成本,。2)提高產品質量,。3)提高生產效率。 本文主要針對在流水線上的集成塊容易發(fā)生管腳丟失和姿態(tài)傾斜的問題,,實現(xiàn)對流水線上的集成塊的管腳以及對集成塊姿態(tài)的自動檢測,。
l 預處理
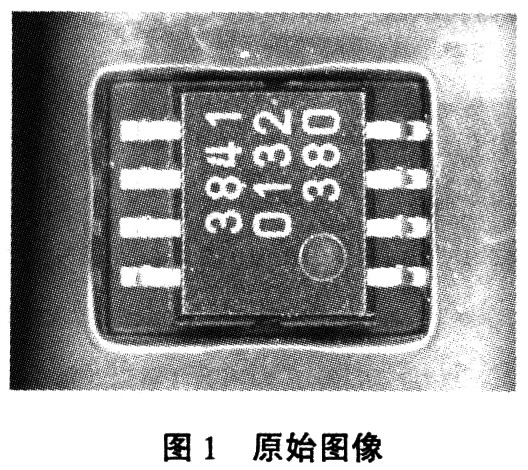
把圖像變成標準圖像的過程就是圖像預處理。本文中所處理的圖像都是在集成塊流水線上方的工業(yè)攝像機所拍下的圖像,,圖像信號由于輸入A/D轉換器件及周圍環(huán)境的影響,,含有各種各樣的噪聲和失真,為了穩(wěn)定地進行后期檢測等工作,,必須通過圖像預處理以消除噪聲,、校正失真,達到改善圖像質量,、便于圖像測量的目的,。
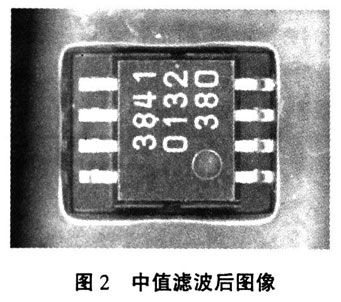
1.1 中值濾波
中值濾波主要目的是去除圖像中的椒鹽噪聲。本文所研究的對像集成塊有較多椒鹽噪聲,,所以采取中值濾波實現(xiàn)圖像的優(yōu)化,。
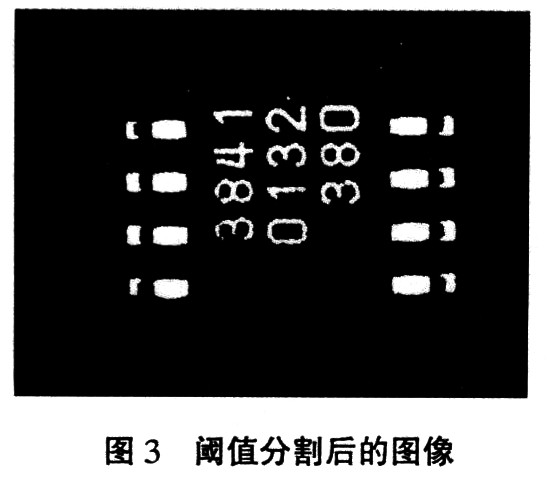
1.2 圖像閾值分割
中值濾波后的圖像達到了較好的去噪目的,再進行閾值分割處理,。圖像閾值分割是一種廣泛使用的基于空間域聚類分析的圖像分割技術,,它主要是利用圖像中要提取的目標和背景在灰度特性上的差異,,選擇一合適的閾值,通過判斷圖像中的每一個像素點的特征屬性是否滿足閾值要求來確定圖像中該像素點屬于目標還是應該屬于背景,,從而產生相應的二值圖像,。由于本系統(tǒng)是在高速運轉的流水線上工作,要求有很高的實時性,,所以采取了兩種動態(tài)閾值分割方法,,即類間方差閾值分割和最大熵閾值分割來實現(xiàn)圖像的分割,這兩種方法是利用目標圖像的直方圖具有典型的雙峰特性,,利用概率論和最大熵的理論,,自動確定一個最佳的閾值,對圖像進行二值化,,在本文中的對象經過中值濾波后得到的圖像的直方圖就滿足雙峰特性,,所以采取上述兩種方法對圖像進行處理,得到二值化圖像,。
2 集成塊姿態(tài)檢測
2.1 集成塊管腳檢測和定位
對圖像進行預處理后,,可以清晰的看到管腳和集成塊上的數字被從背景中分割出來。集成塊管腳是一片連通的白色區(qū)域,,而其所占的面積要比其他無用信息所占的面積要大的多,,故采取面積法對集成塊管腳位置進行檢測。
二值圖像中的連通分量的面積實際上就是連通像素點集中像素的個數,,也就是區(qū)域邊界類包含像素點的數目。設二值圖像f(x,,y)的連通分量ψ(x,,y)的大小為M×N,其中
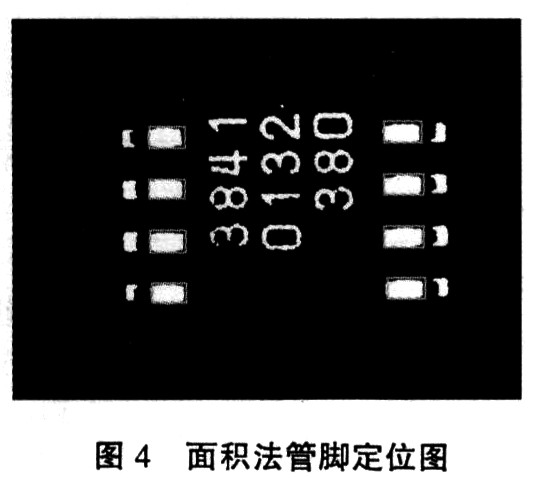
面積法是通過編寫程序在整幅圖像中搜索白色區(qū)域,,同時記下白色區(qū)域的面積(像素點個數)和個數及其四個邊角的坐標,。將所統(tǒng)計到的面積相加,除以白色區(qū)域的個數,,即可得到一個閾值,,由于集成塊管腳所占的面積要比其他無用信息所占的面積要大的多,所以面積平均所得到的閾值可以將較小的區(qū)域去除,,從而保留有用的集成塊的管腳信息,。將大于這一閾值的面積區(qū)域用其四個邊角的坐標連線所成的矩形框定,便可以完成集成塊的管腳定位,。
處理過后的效果如圖4所示,,圖中的紅色方框的作用為定位管腳位置。
2.2 集成塊傾斜角度的測定
在工業(yè)應用中,,為了能讓機械臂很好的將集成塊從流水線上夾取下來,,必須知道集成塊的邊緣是否與流水線平行,,或知道其傾斜的角度對其進行姿態(tài)糾正,這就需要對集成塊在流水線上的姿態(tài)進行檢測,,知道集成塊在流水線上的與水平方向的傾斜角度,,確定一個物體的傾斜角度。本文的創(chuàng)新在于使用了中心點斜率法,。
中心點斜率法:假設圖像中集成塊每個管腳的中心點的坐標為{(xl,,y1),(x2,,y2),,…,(x8,,y8)},,計算每一個管腳與其同邊管腳的斜率{ll,l2,,…,,ln},再對所有的斜率求其算術平均值
這時得到的是弧度,,要把它轉化為角度
![]()
ω就是集成塊的傾斜角度,。
由于中心點斜率法將同邊管腳兩兩之間的斜率都計算入內,故精確度較高,,但程序復雜,,計算量較大,程序運行時間長,,不適合在高速的流水線上使用,。針對這一情況,提出了對中心點斜率法的改進算法,。
改進算法與原先算法的最主要的區(qū)別是改進后的算法并不是將所有同邊管腳兩兩之間的斜率都算出來,,而是先確定一點,記為{x0,,y0},,以這一點為基礎,計算它與其他管腳的斜率

如果是同一邊管腳的話,,他們之間的斜率幾近相等,。反之,則斜率相差很大,。因此,,通過對斜率的比較,便可以將同邊管腳劃分在一起,,這時只有三個斜率值,,再對它們的斜率進行算術平均,,同原算法便可得到集成塊的傾斜角度。
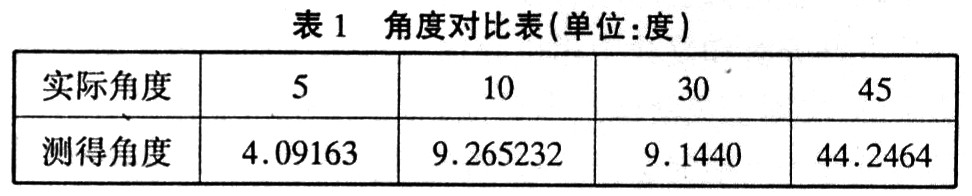
改進后的算法的計算量要比原算法少了很多,,實時性更強,,因而它的實用性更強。為了測試程序測得角度的準確性,,用Photoshop對原圖像進行了旋轉,,角度分別為5,10,,30,,45,90度,,以下是角度識別對比表,。
3 結論與展望
本文闡述了一種新穎的工業(yè)目標檢測的方法,對目標圖像進行測試表明系統(tǒng)已經可以完成集成塊管腳位置的自動檢測與集成塊傾斜角度的實時測量,。在本文中,,結合圖像的預處理和面積法,提出了新的用中心點斜率法測量集成塊傾斜角度的方法,,達到了很好的效果,。
本文的工作目前還僅限于實驗室研究階段,為了使系統(tǒng)具有更廣泛的應用和更好的適應性,,還需要在不同光照條件下圖像的自動閾值分割和提高實時性等方面進行提高,。